Изобретение относится к измерительной технике и может быть использовано для ориентации подвижных объектов.
Известны гироазимуты [1] содержащие свободный гироскоп, главная ось которого устанавливается и удерживается в плоскостях горизонта и исходного азимута.
Их недостатки являются сложность конструкции, значительная стоимость, большие габариты, масса и расход энергии при эксплуатации, а главное, сравнительно малый период сохранения удовлетворительной точности измерений.
Известно также устройство азимутальной ориентации, принятое за прототип [2] содержащее два нереверсивных лопастных винта с вертикальными осями вращения, проходящими через точку подвеса прибора, с противоположными направлениями вращения, два фотоприемника и осветитель, установленные на корпусе прибора, и два кинематически связанных с нереверсивными лопастными винтами световых модулятора и регистратор, устройство обработки сигналов, включающее формирователи импульсов, первые входы которых связаны с фотоприемниками и устройствами привязки импульсных сигналов, вторые с реверсивными счетчиками и инверторами кода, а третьи с регистрами, переключатель, связанный с формирователями импульсов, генератор тактовых импульсов, связанный с устройствами привязки импульсных сигналов и последовательно соединенный с выходами регистров, сумматор, связанный с регистром индикации, дешифратором и регистратором, выполненным, например, в виде индикатора.
Его недостатком является возрастание погрешностей как за счет наличия углов крена и дифферента основания устройства, что ограничивает область его применения условиями, когда они пренебрежимо малы, использование гиростабилизированных платформ, что усложняет конструкцию устройства, увеличивает его массу и стоимость за счет дополнительных устройств, а следовательно, и соответствующих энергоносителей; так и за счет того, что измерение двойного угла разворота объекта увеличивает в условиях возмущений погрешность, обусловленную изменением ориентации объекта за время фиксации измеряемого угла.
Цель изобретения повышение точности измерений.
Цель достигается тем, что устройство для определения азимутальной ориентации содержит корпус с точкой подвеса, первый и второй светомодуляторы, каждый из которых выполнен в виде узла вращения с осью, закрепленным на нем световым отражателем и закрепленными на корпусе осветителем и фотоприемником, а также регистратор, выполненный с двумя измерительными каналами, входы которых подключены к соответствующим фотоприемникам переключателем, последовательно соединенными генератором тактовых импульсов и делителем частоты, последовательно соединенными первым сумматором и первым регистром, вычислителем, дешифратором и индикатором, причем первый и второй входы первого сумматора подключены соответственно к выходам первого и второго измерительных каналов, второй вход регистра подключен к выходу делителя, а оси узлов вращения первого и второго световых модуляторов совмещены с вертикальной осью, проходящей через точку подвеса корпуса, снабжено третьим и четвертым идентичными световыми модуляторами с соответствующими осями узлов вращения, ортогональными между собой и перпендикулярными вертикальной оси, узел вращения второго светового модулятора кинематически связан с введенным приводом, жестко закрепленным на корпусе, а регистратор выполнен с третьим и четвертым измерительными каналами, подключенными соответственно к фотоприемникам третьего и четвертого световых модуляторов, а также с вторым и третьим сумматорами соответственно, подключенными к второму и третьему регистрам, выходы которых подключены к вычислителю, а вторые входы к выходу делителя, при этом первые входы второго и третьего сумматоров подключены к выходам соответственно третьего и четвертого измерительных каналов, первые входы второго и третьего сумматоров подключены к выходу второго измерительного канала, а вычислитель выполнен с возможностью определения и введения поправок за наклон.
Таким образом, устройство позволяет получить и учесть информацию об изменении ориентации объекта в трехмерном пространстве, а наличие жестко закрепленного на корпусе привода, кинематически связанного с узлом вращения второго светового модулятора, позволяет вдвое уменьшить погрешность от наличия угла отклонения объекта от исходного направления, обусловленную изменением ориентации за время фиксации измеряемого угла.
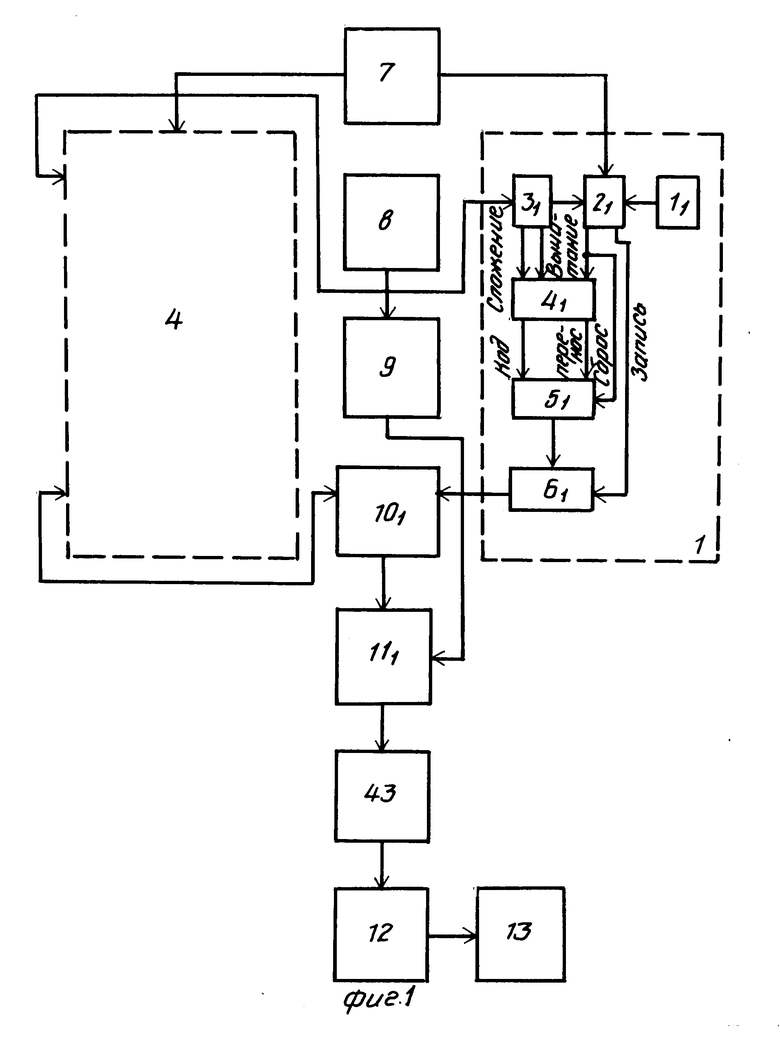
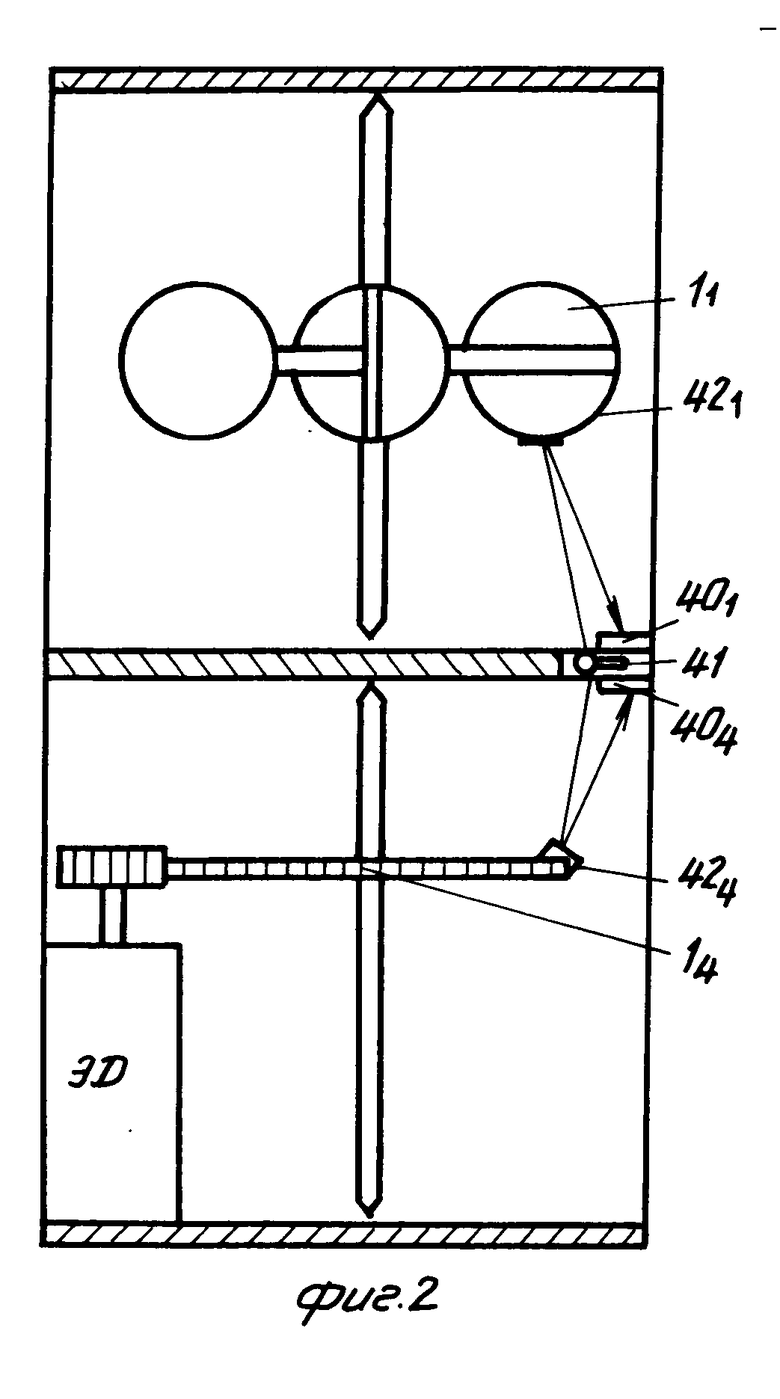
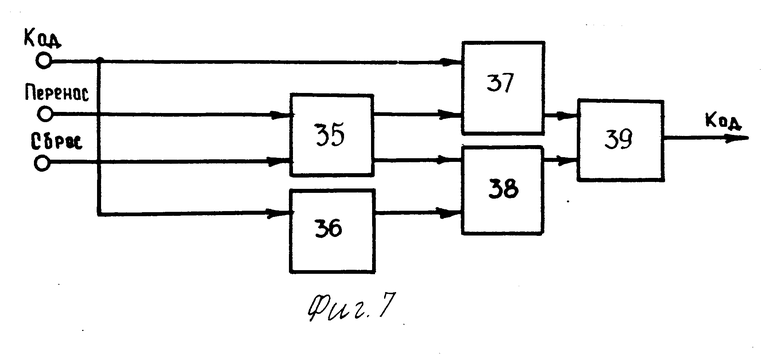
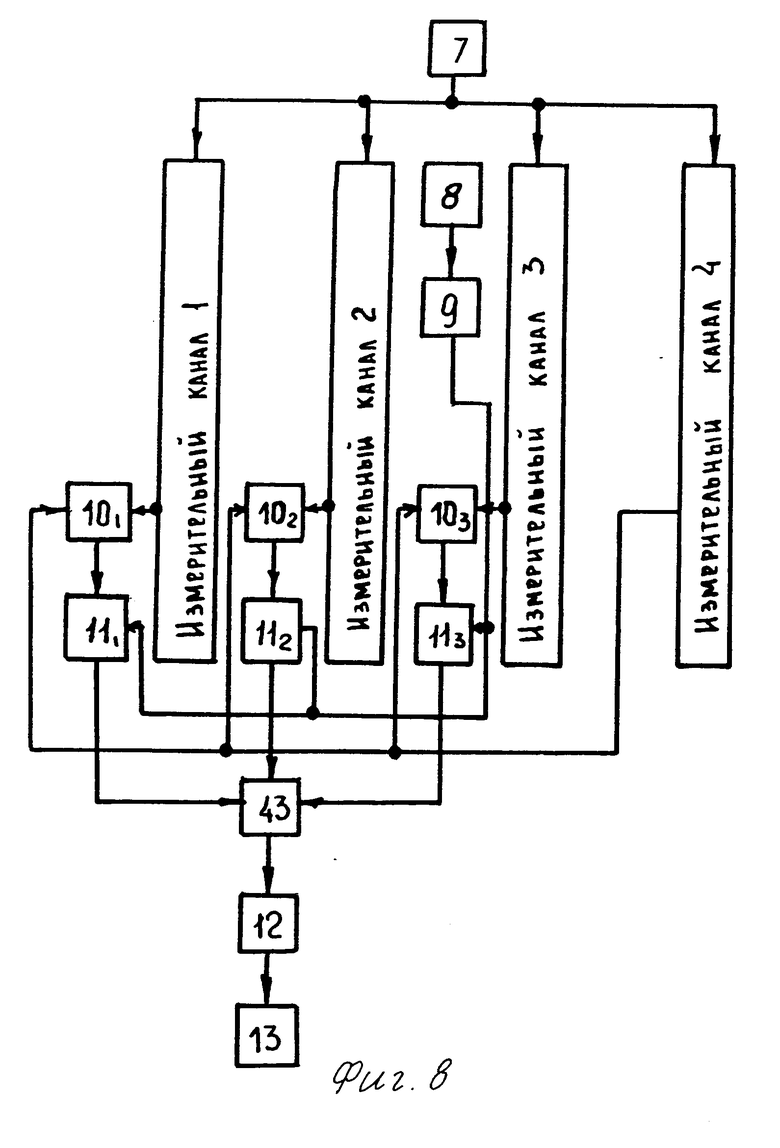
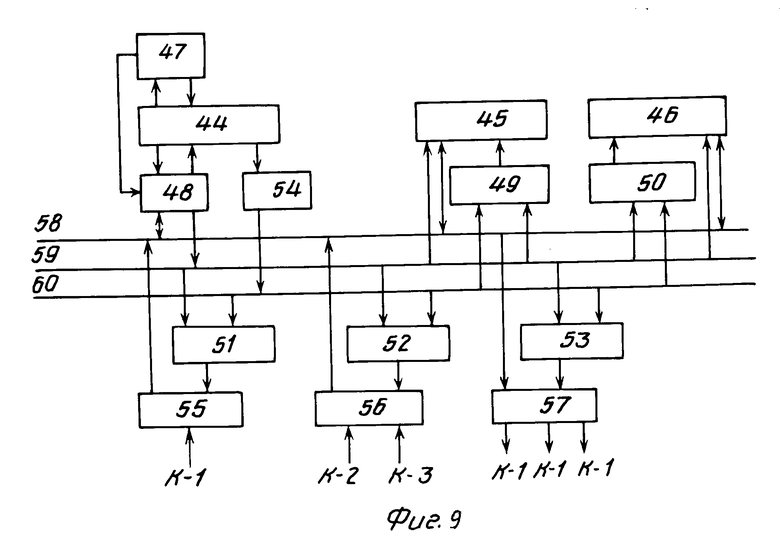
На фиг. 1 представлена блок-схема канала измерения углов отклонения азимута от исходного направления; на фиг.2 схема установки чувствительных элементов устройства; на фиг. 3 схема формирователя импульсов; на фиг.4 временные диаграммы работы формирователя; на фиг.5 схема устройства привязки; на фиг. 6 временныe диаграммы работы устройства привязки; на фиг.7 схема одного разряда инвертора кода; на фиг.8 блок-схема каналов измерения углов отклонения азимута, крена и дифферента объекта от исходных; на фиг.9 функциональная схема вычислительного устройства; на фиг.10 блок-схема алгоритма обработки информации в вычислительном устройстве.
Устройство для определения азимутальной ориентации содержит (фиг.1 и фиг. 8) четыре идентичных измерительных канала и цифры в скобках обозначают элементы и узлы соответствующих каналов, каждый из которых содержит (фиг.2) чувствительный элемент 11 (12-14), выполненный в виде узла вращения, причем 11(13, 14) в виде лопастных винтов, а 12 может быть выполнен в виде светового отражателя, приводимого во вращение электродвигателем, формирователи 21(22-24) импульсов, блок 31(32-34) привязки, реверсивный счетчик 41(42-44), инвертор 51(52-54) кода и регистр 61(62-64),а также общие для всех каналов переключатель 7, генератор 8 тактовых импульсов, делитель 9 частоты, кроме того, сумматоры 101 (102, 103), регистры 111 индикации (112, 113), дешифратор 12 и индикатор 13.
Каждый формирователь 21(22-24) импульсов (фиг.3) состоит из триггера Шмитта 141(142-144), делителя 151(152-154) частоты, инвертора 161(162-164),
четырехвходового элемента И-НЕ 181(182-184), триггера 191(192-194), элемента И-НЕ 201(202-204), инвертора 211(212-214), триггера 221-231 (222-232, 223-233, 224-234), элемента И-НЕ 241 (242-244), инвертора 251 (252-254), триггера 261-271(262-272, 263-273, 264-274), элемента И-НЕ 281(282-284). Блок привязки (фиг. 5) состоит из инвертора 291(292-294), D-триггера 301(302-304), триггера 311 (312-314) и элементов И-НЕ 321(322-324), 331(332-334), 341(342-344).
Каждый инвертор 51(52-54) кода (фиг.7) состоит из триггера 351 (352-354), инвертора 361(362-364) и элементов И-НЕ 371 (372-374), 381(282-384), 391(392-394).
На корпусе устройства установлены (фиг.2) фотоприемники 401(402-404), осветители 411(412-414), на нереверсивных лопастных винтах световые отражатели 421(423, 424), а световой отражатель 422 приводится во вращение электродвигателем.
Устройство для учета поправок в угол отклонения азимута от исходного направления за счет наличия углов крена и дифферента объекта содержит вычислитель 43, включаемый между регистрами 111(112, 113) и дешифратором 12.
Вычислитель 43 выполнен по модульному принципу, обеспечивающему подключение к единой магистрали модулей центрального процессора 44, постоянного запоминающего устройства 45, оперативного запоминающего устройства 46 и устройства ввода-вывода, в качестве которого используются измерительные каналы.
Оно содержит, кроме того, генератор 47 тактовых импульсов, системный контроллер 48, дешифраторы 49-53, выбора устройств, буферное устройство 54, параллельные интерфейсы 55-57, связанные, как и элементы вычислителя 43, с тремя шинами, представляющими собой шину 58 данных, шину 59 команд и шину 60 адреса.
Устройство для определения азимутальной ориентации работает следующим образом.
Чувствительные элементы 11(13, 14) под воздействием набегающего потока вращаются в неподвижной азимутальной системе, а также в системе измерения углов крена и дифферента объекта, а 12 в системе, связанной с разворотами точки подвеса. Для фиксации момента совмещения чувствительных элементов с диаметральной плоскостью объекта 11 и 12, а 13 и 14 соответственно с горизонтальной плоскостью объекта, в которой оси вращения их узлов вращения взаимно ортогональны.
Фиксация осуществляется с помощью фотоприемников 401(402-404) и световых отражателей 421(422-424).
Сигналы фотоприемников поступают в формирователи 21(22-24) импульсов, далее на триггер 141(142-144) Шмитта, преобразующий их в импульсы с крутыми фронтами, что необходимо для надежной работы цифровых элементов всего устройства, после чего сигналы поступают на делитель 151(152-154) частоты и логический элемент И-НЕ 171(172-174).
С помощью масштабирующего переключателя 7 выбирают один из четырех вентилей, входящих в состав логического элемента И-НЕ 171(172-174), подавая на вход инвертора 161(162-164) потенциал, соответствующий уровню логического "0". При положении "1" переключателя 7 на выходе логического элемента И-НЕ 181(182-184) появляются импульсы триггера 141(142-144) Шмитта. С выхода элемента И-НЕ 181(182-184) сигналы "Строб" поступают на блок 31(32-34) привязки и для последующего формирования сигналов на вход триггера 191(192-194). С помощью логических элементов И-НЕ 201(202-204), 241(242-244), триггера 221-231(222-232, 223-233, 224-234) и инвертора 211(212-214) формируется сигнал "Запись", соответствующий фронту сигнала "Строб", а с помощью инвертора 251(252-254), триггера 261-271 (262-272, 263-273, 264-274) и элемента И-НЕ 281(282-284) формируется сигнал "Сброс", соответствующий срезу сигнала "Строб". Сигнал "Запись" поступает на регистр 61(62-64) и приводит к записи кода, поступающего на информационные входы регистра 61 (62-64). Сигнал "Сброс" поступает на реверсивный счетчик 41(42-44) и инвертор 51(52-54) кода и служит для установки реверсивного счетчика 41(42-44) и инвертора 51(52,53,54) кода в исходное состояние.
Сигнал "Строб" поступает на блок 31(32-34) привязки, на второй вход которого подаются импульсы генератора 8 тактовых импульсов. На выходе блока 31(32-34) привязки формируются пачки импульсов генератора 8 тактовых импульсов, длительность этих пачек равна интервалам времени между импульсами на выходе элемента И-НЕ 181(182-184).
С выхода блока привязки эти пачки импульсов поступают поочередно на выходы сложения и вычитания реверсивного счетчика 41(42-44), который затем устанавливается в нулевое состояние сигналом "Сброс" формирователя 21(22-24) импульсов, который формируется из каждого второго импульса с выхода элемента И-НЕ 181(182-184). После обнуления реверсивного счетчика 41(42-44) в нем снова подсчитывается первая пачка импульсов, пришедшая после сигнала "Сброс" в режиме сложения и записывается, а далее пачка импульсов, также соответствующая длительности одного полного оборота соответствующего чувствительного элемента в режиме вычитания, в результате чего реверсивный счетчик будет содержать код разности длительности пачек импульсов.
Работа второго измерительного канала идентична работе первого, но его чувствительный элемент 12 вращается в направлении, противоположном направлению вращения чувствительного элемента 11, причем он осуществляет вращение в системе углов, связанных с корпусом объекта.
При неподвижном подвесе чувствительного элемента в реверсивном счетчике 41(42-44) будет записан код нуля, а при повороте образуется код, соответствующий углу разворота подвеса чувствительного элемента 11(12-14). Полученный код поступает на инвертор 51(52-54) кода, на него же поступают сигналы "Перенос" счетчика 41(42-44) и "Сброс" формирователя 21(22-24) импульсов. В зависимости от наличия или отсутствия сигнала "Перенос" счетчика 41(42-44) инвертор 51(52-54) кода либо инвертирует, либо не инвертирует код счетчика 41(42-44). После этого код поступает на регистр 61(62-64) и с помощью сигнала "Запись", поступающего с формирователя 21(22-24) импульсов, записывается в него. Таким образом, в регистры 61(62-64) записываются коды, одинаковые по величине, но противоположные по знаку. В сумматоре 101(102, 103) код второго измерительного канала вычитается из кодов первого, третьего и четвертого каналов. В регистры 111(112, 113) индикации с сумматоров 101(102, 103) поступает значение угла поворота подвеса чувствительных элементов 11(13, 14).
Генератор 8 тактовых импульсов вырабатывает импульсную последовательность сигналов, частота которых определяется дискретностью отсчета.
Коды измеренных величин с трех каналов поступают на параллельные интерфейсы (фиг. 9) 55-57, связанные, как и элементы вычислителя 43, с тремя шинами (соответственно данных, команд и адреса) 58-60.
Программа работы вычислителя 43 содержит команды опроса интерфейсов, во время которых каждый из каналов передает коды измеренных величин на шину 58 данных и через нее на оперативное запоминающее устройство 46 на время обработки результатов измерений, которая осуществляется по полной или упрощенной формуле.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ | 1990 |
|
RU2047837C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2013 |
|
RU2534955C1 |
| СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2560204C2 |
| НЕЙРОВЫЧИСЛИТЕЛЬ | 2013 |
|
RU2553098C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2563333C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| СИСТЕМА АСТРОНАВИГАЦИИ | 2013 |
|
RU2548927C1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
| Устройство для измерения концентрации пыли в воздухе | 1985 |
|
SU1257477A1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА НОМЕРОВ ТРАНСПОРТНЫХ ОБЪЕКТОВ | 1991 |
|
RU2068583C1 |





Изобретение относится к измерительной технике и может быть использовано для определения объекта от исходного азимута, например для ориентации подвижных объектов (судов, самолетов, измерителей направления и скорости потоков и т. п.) в условиях возмущений, приводящих к появлению углов крена и дифферента (тангажа). Сущность изобретения: устройство содержит два сканирующих узла с вертикальной осью вращения, проходящей через точку подвеса прибора, причем направления их вращения взаимно противоположны, блок обработки сигналов, включающий формирователи импульсов, блок привязки импульсных сигналов, реверсивные счетчики, инверторы кода переключателей, генератор тактовых импульсов, делители импульсных сигналов, сумматор, регистр индикации, дешифратор и два дополнительных сканирующих узла, чувствительные элементы которых устанавливаются в горизонтальной плоскости таким образом, чтобы оси вращения этих сканирующих узлов в ней были взаимно перпендикулярны, причем ось одного из них совпадает с осевым сечением объекта. Один из сканирующих узлов с вертикальной осью вращения выполнен кинематически связанным с корпусом прибора. Поправка азимута, обусловленные креном и дифферентом устройства, вычисляются микропроцессором. 10 ил.
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ, содержащее корпус с точкой подвеса, первый и второй световые модуляторы, каждый из которых выполнен в виде узла вращения с осью, закрепленным на нем световым отражателем и закрепленными на корпусе осветителем и фотоприемником, а также регистратор, выполненный с двумя измерительными каналами, входы которых подключены к соответствующим фотоприемникам, переключателем, последовательно соединенными генератором тактовых импульсов и делителем частоты, последовательно соединенными первым сумматором и первым регистром, вычислителем, дешифратором и индикатором, причем первый и второй входы первого сумматора подключены соответственно к выходам первого и второго измерительных каналов, второй вход регистра подключен к выходу делителя, а оси узлов вращения первого и второго световых модуляторов совмещены с вертикальной осью, проходящей через точку подвеса корпуса, отличающееся тем, что оно снабжено третьим и четвертым идентичными световыми модуляторами с соответствующими осями узлов вращения, ортогональными между собой и перпендикулярными вертикальной оси, узел вращения второго светового модулятора кинематически связан с введенным приводом, жестко закрепленным на корпусе, а регистратор выполнен с третьим и четвертым измерительными каналами, подключенными соответственно к фотоприемникам третьего и четвертого световых модуляторов, а также с вторым и третьим сумматорами, соответственно подключенными к второму и третьему регистрам, выходы которых подключены к вычислителю, а вторые входы к выходу делителя, при этом первые входы второго и третьего сумматоров подключены к выходам соответственно третьего и четвертого измерительных каналов, первые входы второго и третьего сумматоров к выходу второго измерительного канала, а вычислитель выполнен с возможностью определения и введения поправок на наклон.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР N 1563402, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
