Предлагаемое устройство относится к области тренажеростроения, осуществляет имитацию радиолокационных эхо-сигналов на видеочастоте, отраженных от наблюдаемых объектов. Оно может быть использовано в тренажерах для подготовки операторов активных РЛС.
При имитации радиолокационных сигналов необходимо учитывать ряд их характерных радиотехнических параметров и изменения (флюктуации) этих параметров в зависимости от координат цели, характера ее маневрирования, физических свойств цели, условий распространения сигналов, параметров передающих устройств активных РЛС и других факторов.
К характерным радиотехническим параметрам целей можно отнести длительность "отраженного" сигнала, форму огибающей сигнала, амплитуду "отраженного" сигнала, угловую протяженность и интенсивность сигнала на экране индикатора.
Одним из важных вопросов, который необходимо решать разработчикам устройств для имитации радиолокационных эхо-сигналов, отраженных от поверхностей наблюдаемых объектов, является достижение необходимой точности имитации сигналов на экране индикатора РЛС.
Известно, что изображение, создаваемое на экране индикатора кругового обзора, характеризуется яркостью отдельных точек (участков) экрана, формой и временем существования отметок, а также средней яркостью экрана.
Указанные факторы оказывают определяющее воздействие на процесс имитации эхо-сигналов на экране индикатора активной РЛС и в конечном итоге на точность имитации в данных сигналов.
Известно устройство для обучения операторов (см. Ралль Ю.В. и др. Тренажеры и имитаторы ВМФ. - М.: Воениздат, 1969, с. 50-51, а.с. №367448, МКИ G09B 7/02), содержащее установленные на одной оптической оси экран и объектив, блоки фотоэлектрических датчиков, подключенные к логическому блоку, соединенному с блоком управления и синхронизации и кинопроектором, блок селекции кодовой информации, подключенный к логическому блоку, а шторка блока селекции установлена между кинопроектором и объективом.
Устройство работает следующим образом. Текущие координаты объекта тренировки, вычисленные логическим блоком, подаются на следящие системы блока управления, обеспечивающего управление микрометрическими винтами блока кинопроектора. В результате этого отображается движение объекта-цели на экране, а сама цель на экране изображается символом, вырезанным на диафрагме (шторке) блока селекции в виде точки или контура объекта цели (контур корабля и т.д.).
Недостатками устройствами для обучения операторов являются:
- низкая эффективность обучения расчетов операторов навыкам боевой эксплуатации станций из-за низкой достоверности имитации изображения на экране индикатора радиолокационной обстановки;
- отметка цели не соответствует реальной отметке цели на экране индикатора;
- не учитываются изменения ширины отметки цели по азимуту с учетом скорости вращения и ширины диаграммы направленности (ДН) антенны;
- не учитываются колебания выходной мощности передающего устройства, условия распространения сигналов на трассе и дальность до цели;
- не обеспечивается съем оператором с экрана индикатора координат цели.
Известно устройство для имитации пространственного положения целей на экране индикатора по а.с. №417808, в котором частично устранены недостатки, указанные выше.
Так, данное устройство уже учитывает зависимость ширины отметки цели по азимуту с учетом скорости вращения и ширины ДН антенны, тем самым повышается достоверность изображения отметки цели на экране индикатора.
Устройство для имитации пространственного положения целей на экране индикатора по а.с. №417808 по своей технической сущности наиболее близко к заявляемому устройству и поэтому выбрано в качестве прототипа.
Устройство для имитации пространственного положения целей на экране индикатора по а.с. №417808 включает в себя последовательно соединенные генератор импульсов-меток дальности, логический элемент "И", счетчик импульсов-меток дальности, ЭВМ, блок согласования и индикатор, а также блок имитации антенны и формирования развертки азимута, блок формирования развертки азимута и счетчик импульсов азимута, при этом первый и второй выходы блока имитации антенны и формирования развертки азимута подключены соответственно к вторым входам логического элемента "И" и индикатора, третий вход которого подключен к выходу блока формирования развертки азимута, второй выход счетчика импульсов-меток дальности подключен к второму входу ЭВМ, выход счетчика импульсов азимута подключен к третьему входу ЭВМ, выход счетчика импульсов-меток дальности подключен одновременно к входам блока формирования развертки дальности и счетчика импульсов азимута.
Рассмотрим функционирование устройства имитации пространственного положения целей на экране индикатора по а.с. №417808.
Блок имитации антенны и формирования развертки азимута формирует развертку азимута на индикаторе и в момент прохождения начала отсчета азимута (направление на север) открывает логический элемент "И", к входу которого подключен высокостабильный генератор. Через логический элемент "И" импульсы меток дальности поступают в n-разрядный счетчик импульсов-меток дальности, который кроме их счета формирует импульсы запуска развертки дальности, частота следования которых в n раз меньше частоты следования импульсов-меток дальности. Таким образом, каждый период развертки дальности всегда содержит одинаковое число импульсов-меток дальности.
Импульсы запуска развертки дальности, снимаемые с выхода счетчика импульсов-меток дальности, поступают как на вход блока формирования развертки азимута, так и на вход счетчика импульсов азимута, который путем счета числа поступающих импульсов запуска развертки дальности в каждый момент времени фиксирует угловое положение луча радиально-круговой развертки по азимуту. После полного оборота луча радиально-круговой развертки на 360° счетчик импульсов азимута сбрасывается и вновь начинается подсчет импульсов, поступающих на его вход.
Универсальность устройства для имитации пространственного положения целей на экране индикатора по а.с. №417808 позволяет работать в двух режимах.
В первом режиме текущие координаты дальности и азимута траекторий движения целей заранее рассчитываются ЭВМ и хранятся в ее оперативной памяти. При этом в процессе работы устройства для имитации пространственного положения целей на экране индикатора каждый импульс запуска развертки дальности, поступая через систему прерывания в устройство управления ЭВМ, переводит ее на подпрограмму опроса содержимого счетчика импульсов азимута и сравнения его показаний с ближайшим текущим значением азимута цели, хранимым в оперативной памяти ЭВМ.
Если показания счетчиков импульсов азимута не соответствуют ближайшему текущему значению азимута цели, то ЭВМ возвращается на основную программу, не связанную с имитацией отметок целей. В противном случае она переходит на вторую подпрограмму непрерывного опроса содержимого счетчика импульсов-меток дальности и сравнения его показаний с ближайшим значением дальности цели, находящейся на зафиксированном азимуте.
Как только текущее значение дальности цели будет точно соответствовать показанию счетчика импульсов-меток дальности, ЭВМ выдает на блок согласования сигнал "Включить на развертке дальности индикатора импульс цели".
Число принятых активной РЛС эхо-сигналов в пачке цели является случайной величиной, зависящей от многих факторов. В рассматриваемом устройстве для имитации пространственного положения целей на экране индикатора число принятых эхо-сигналов в пачке зависит от скорости вращения и ширины ДН пеленгационной антенны, которые устанавливаются программой работы ЭВМ в соответствии с имитацией конкретной тактической обстановки.
Для имитации очередных, следующих за первым К-1 импульсов цели, на смежных линиях развертки дальности ЭВМ еще К-1 раз выдает сигнал о включении на развертке дальности импульса цели в момент равенства текущих значений и показаний счетчика импульсов-меток дальности.
Во втором режиме работы устройства для имитации пространственного положения целей на экране индикатора все текущие координаты целей заранее не рассчитываются. В оперативной памяти ЭВМ хранятся только исходные значения координат (азимута и дальности) по каждой цели и скорости их движения. В процессе работы ЭВМ по специальной программе готовит текущие координаты целей для следующего обзора пространства и выдает их на индикатор. При необходимости изменения траектории движения цели достаточно изменить параметры движения этой цели (скорость или одну из указанных координат).
Принцип построения подобных программ основан на использовании алгоритмов экстраполяции, сущность которых заключается в том, что по координатам ранее полученных отметок вычисляются координаты будущей отметки.
Алгоритм подобного типа достаточно просто реализуется на ЭВМ. Единственный недостаток заключается в том, что с увеличением числа отметок, по которым прогнозируется будущая координата, требуется больший объем оперативной памяти ЭВМ.
Итак, устройство для имитации пространственного положения целей на экране индикатора по а.с. №417808 позволяет имитировать сигналы целей на видеочастоте с помощью ЭВМ с учетом зависимости количества принятых активной РЛС импульсов в пачке цели от скорости вращения и ширины ДН антенны.
К недостаткам устройства для имитации пространственного положения целей на экране индикатора по а.с. №417808 следует отнести:
- невозможность учета флюктуации принятых эхо-сигналов активной РЛС из-за колебаний мощности передающего устройства и условий распространения отраженных сигналов, что снижает точность имитации эхо-сигналов при отображении их на экране индикатора.
Целью предлагаемого изобретения является повышение точности имитации эхо-сигналов, принятых активной РЛС при наблюдении за объектами, путем учета их флюктуации в зависимости от колебаний выходной мощности передающего устройства и условий распространения отраженных от объектов радиолокационных сигналов.
Поставленная цель достигается тем, что в устройство для имитации пространственного положения целей на экране индикатора, включающее в себя последовательно соединенные генератор импульсов-меток дальности, логический элемент "И", счетчик импульсов-меток дальности и ЭВМ, блок согласования и индикатор, а также блок имитации антенны и формирования развертки азимута, блок формирования развертки дальности и счетчик импульсов азимута, при этом второй выход счетчика импульсов-меток дальности подключен к второму входу ЭВМ, первый вход которой подключен одновременно к входам блока формирования развертки дальности и счетчика импульсов азимута, первый и второй выходы блока имитации антенны и формирования развертки азимута подключены соответственно к вторым входам логического элемента "И" и индикатора, третий вход которого подключен к выходу блока формирования развертки дальности, выход счетчика импульсов азимута подключен к третьему входу ЭВМ, введены микропроцессорная система и вентиль, при этом и первый и второй входы микропроцессорной системы подключены соответственно к выходу ЭВМ и второму выходу счетчика импульсов меток дальности, первый и второй входы вентиля подключены соответственно к выходу ЭВМ и выходу микропроцессорной системы, а выход вентиля подключен к входу блока согласования.
Такое построение устройства для имитации пространственного положения целей на экране индикатора позволяет имитировать пачки принятых активной РЛС импульсов, отраженных от наблюдаемых объектов, с учетом флюктуации выходной мощности передающих устройств и условий распространения сигналов по трассе и, следовательно, повысить точность имитации эхо-сигналов на индикаторе активной РЛС.
Сущность предлагаемого изобретения поясняется чертежами.
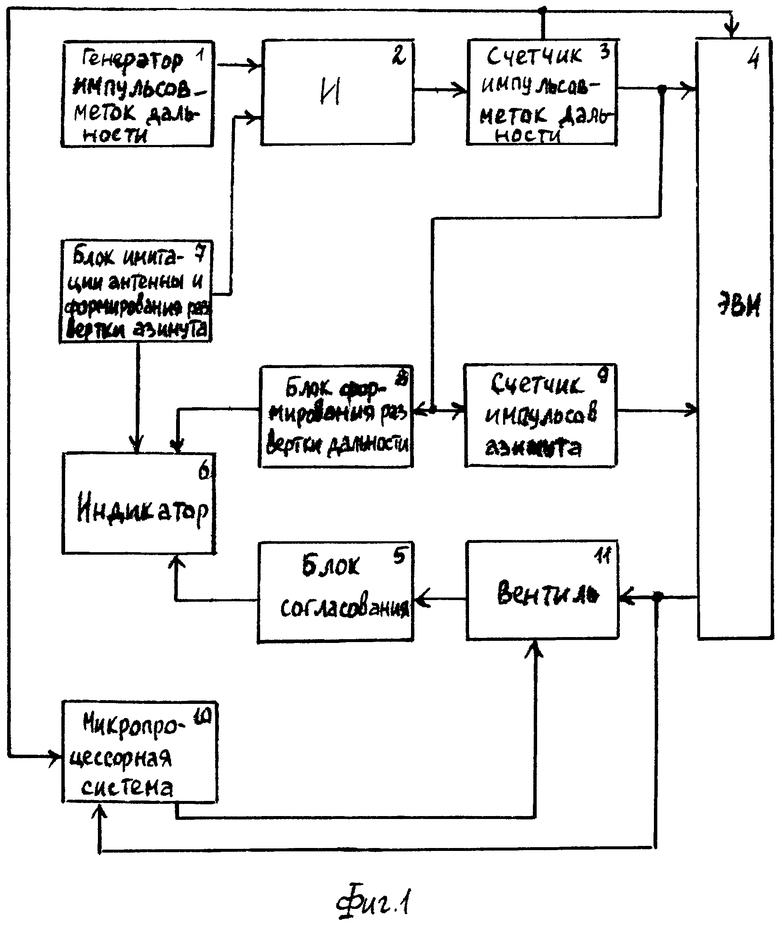
Блок-схема устройства для имитации пространственного положения целей на экране индикатора приведена на фиг. 1.
Блок-схема счетчика импульсов-меток дальности приведена на фиг. 2.
Блок-схема ЭВМ приведена на фиг. 3.
Блок-схема индикатора приведена на фиг. 4.
Блок-схема блока имитации антенны и формирования развертки азимута приведена на фиг. 5.
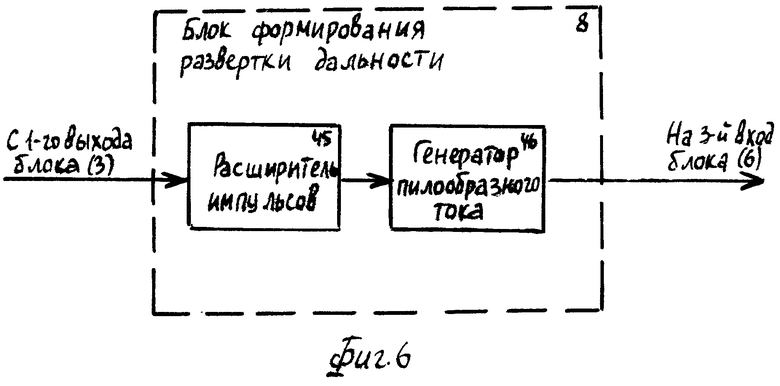
Блок-схема блока формирования развертки дальности приведена на фиг. 6.
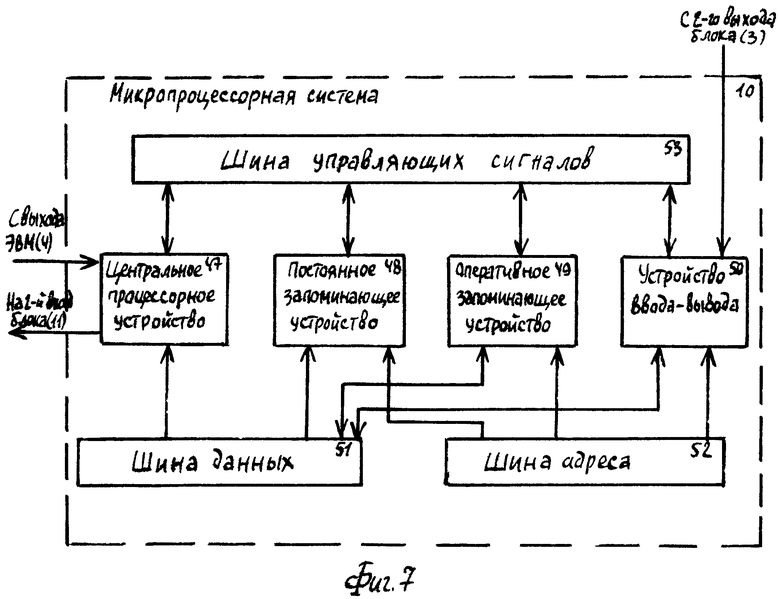
Блок-схема микропроцессорной системы приведена на фиг. 7.
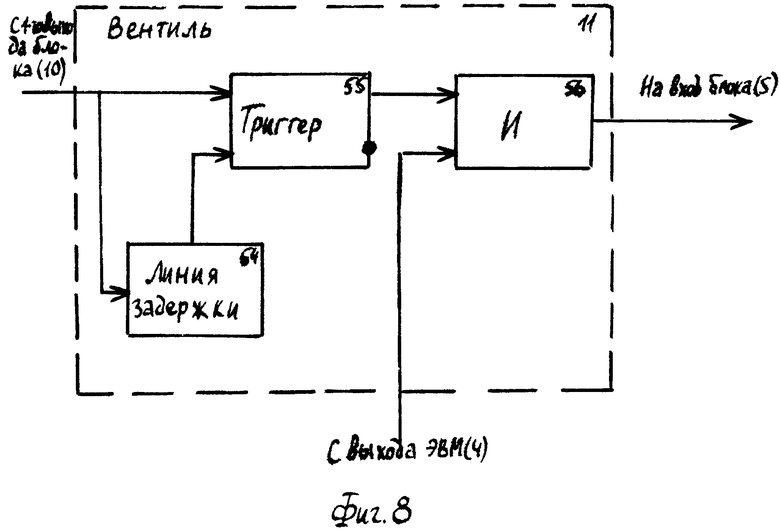
Блок-схема вентиля приведена на фиг. 8.
Устройство для имитации пространственного положения целей на экране индикатора (см. фиг. 1) включает в себя последовательно соединенные генератор импульсов-меток дальности (1), логический элемент "И" (2), счетчик импульсов-меток дальности (3) и ЭВМ (4), блок согласования (5) и индикатор (6), а также блок имитации антенны и формирования развертки азимута (7), блок формирования развертки дальности (8), счетчик импульсов азимута (9), микропроцессорную систему (10) и вентиль (11), при этом второй вход логического элемента "И" (2) подключен к первому выходу блока имитации антенны и формирования развертки азимута (7), второй выход которого подключен к первому входу индикатора (6), второй выход счетчика импульсов меток дальности (3) подключен одновременно к второму входу ЭВМ (4) и первому входу микропроцессорной системы (10), третий вход и выход ЭВМ (4) подключены соответственно к выходу счетчика импульсов азимута (9) и входу вентиля (11), выход ЭВМ (4) подключен также к второму входу микропроцессорной системы (10), второй и третий входы индикатора (6) подключены соответственно к выходам блока согласования (5) и блока формирования развертки дальности (8), выход счетчика импульсов-меток дальности (3) подключен одновременно к входам блока формирования развертки дальности (8) и счетчика импульсов азимута (9), второй вход и выход вентиля (11) подключены соответственно к выходу микропроцессорной системы (10) и входу блока согласования (5).
1. Генератор импульсов-меток дальности (1) предназначен для синхронизации радиально-круговой развертки индикатора (6).
Генератор импульсов-меток дальности (1) представляет собой генератор тактовых импульсов, который генерирует импульсы эталонной стабильной частоты повторения. Так, например, у генераторов, стабилизированных кварцем, ΔT очень мало и составляет (10-6-10-8) T.
Техническая реализация генератора импульсов-меток дальности (1) подробно описана в специальной технической литературе (См. Тесленко Л. Генератор прямоугольных импульсов. Радио, №7, 1984, с. 28-30).
2. Логический элемент "И" (2) предназначен для организации режима работы счетчика импульсов-меток дальности (3).
Логический элемент "И" (2) реализует переключательную функцию конъюнкции и представляет собой многополюсник с двумя входами и одним выходом. См. Справочник по цифровой вычислительной технике. Под ред. Б.Н. Малиновского. - К., Изд-во "Технiка", 1974, с. 96-108.
3. Счетчик импульсов-меток дальности (3) предназначен для счета импульсов-меток дальности и формирования импульсов запуска развертки дальности, частота следования которых в n раз меньше частоты следования импульсов-меток дальности.
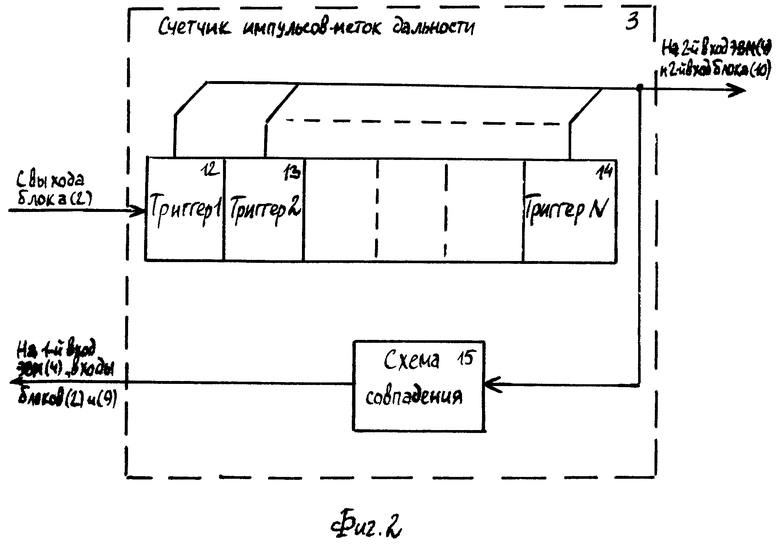
Блок-схема счетчика импульсов-меток дальности (3) приведена на фиг. 2.
Счетчик импульсов-меток дальности (3) включает в себя последовательно соединенные первый триггер (12), второй триггер (13), ……, n-ный триггер (14), а также схему совпадения (5), при этом счетный вход первого триггера (12) подключен к выходу логического элемента "И" (2), а n-выходов триггеров объединены в шину, которая подключена соответственно к вторым входам ЭВМ (4) и микропроцессорной системы (10), а также к входу схемы совпадения (15), выход которой подключен соответственно к первому входу ЭВМ (4), входам блока формирования развертки дальности (8) и счетчика импульсов азимута (9).
Схема совпадения (15) представляет собой сборку логических элементов "И".
Техническая реализация счетчика импульсов-меток дальности (3) не вызывает проблем. См. Справочник по цифровой вычислительной технике. Под ред. Б.Н. Малиновского. - К.: Изд-во "Технiка", 1974.
4. ЭВМ (4) предназначена для подготовки текущих координат наблюдаемых объектов, необходимых для следующего "Обзора пространства" и выдачи их на экран индикатора (6).
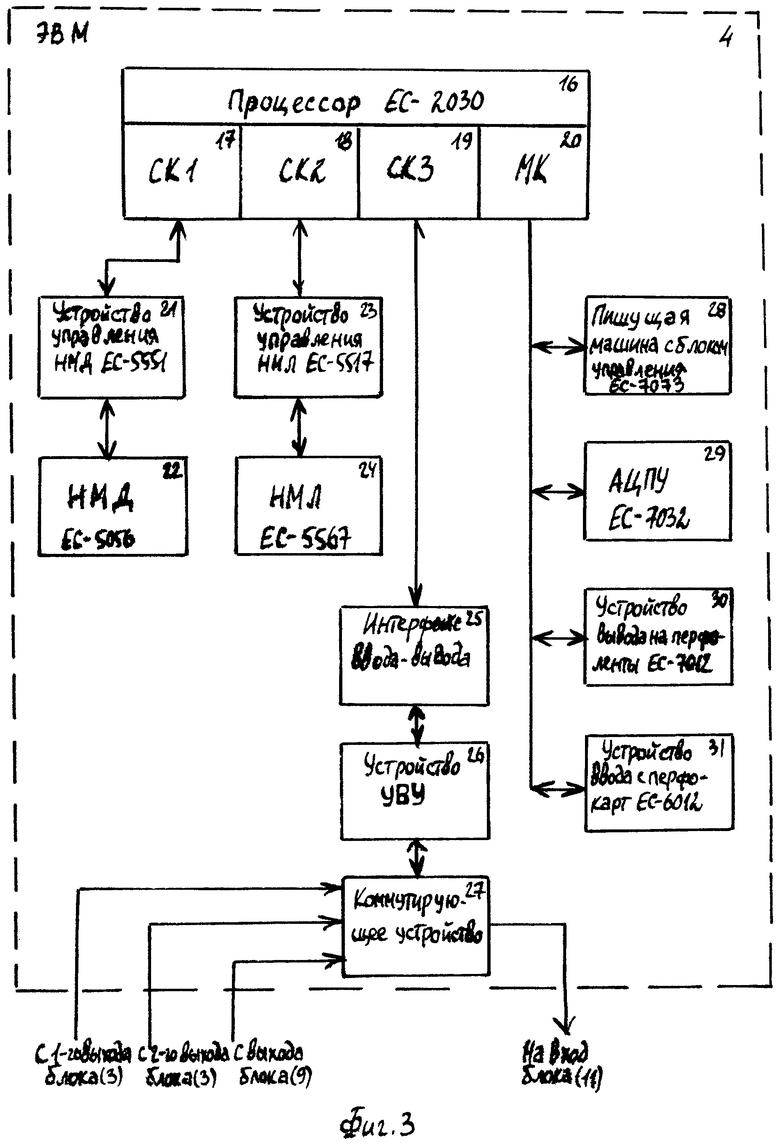
Блок-схема ЭВМ (4) приведена на фиг. 3.
ЭВМ (4) включает в себя процессор (16), первый селекторный канал (17), второй селекторный канал (18), третий селекторный канал (19), мультиплексный канал (20), устройство управления НМД (21), НМД (22), устройство управления НМЛ (23), НМЛ (24), интерфейс ввода-вывода (25), устройство УВУ (26), коммутирующее устройство (27), пишущую машинку с блоком управления (28), АЦПУ (29), устройство вывода на перфоленты (30) и устройство ввода с перфокарт (31), при этом первый селекторный канал (17) обеспечивает двунаправленную связь процессора (16) с устройством управления НМД (21) и НМД (22), второй селекторный канал (18) обеспечивает двунаправленную связь процессора (16) с устройством управления НМЛ (23) и НМЛ (24), третий селекторный канал (19) обеспечивает двунаправленную связь процессора (16) с интерфейсом ввода-вывода (25), устройством УВУ (26) и коммутирующим устройством (27), мультиплексный канал (20) обеспечивает двунаправленную связь процессора (16) с пишущей машинкой (28), АЦПУ (29), устройством вывода на перфоленты (30) и устройством ввода с перфокарт (31), первый, второй и третий входы коммутирующего устройства (27) подключены соответственно к первому, второму выходам счетчика импульсов-меток дальности (3) и выходу счетчика импульсов азимута (9), а выход коммутирующего устройства (27) подключен к входу вентиля (11). См. В.И. Грубов, В.С. Кирдан. Устройства электронной вычислительной техники. - К.: "Вища школа", 1980 г.
5. Блок согласования (5) предназначен для обеспечения имитации на экране индикатора (6) импульсов цели.
Елок согласования (5) может быть выполнен по схеме ждущего мультивибратора со схемой управления. См. П. Хоровиц, У. Хилл. Искусство схемотехники. Том I. Пер. с англ. под ред. М.В. Гальперина - М.: Мир, 1983, с. 212-214.
6. Индикатор (6) предназначен для индикации отметок целей в виде пачек отраженных эхо-сигналов, состоящих из К импульсов.
Блок-схема индикатора (6) приведена на фиг. 4.
Индикатор (6) включает в себя смеситель (32), схему подсвета прямого хода (33), ЭЛТ (34), схему регулировки яркости (35) и схему регулировки фокуса (36), при этом вход и выход смесителя (32) подключены соответственно к выходу блока согласования (5) и первому управляющему электроду ЭЛТ (34), вход и выход схемы подсвета прямого хода (33) подключены соответственно к выходу блока формирования развертки дальности (8) и второму управляющему электроду ЭЛТ (34), выход схемы регулировки яркости (35) подключен к третьему управляющему электроду ЭЛТ (34), выход схемы регулировки фокуса (36) подключен к фокусирующей катушке ЭЛТ (34), первая и вторая отклоняющие катушки ЭЛТ (34) подключены соответственно к второму выходу блока имитации антенны и формирования развертки азимута (7) и выходу блока формирования развертки дальности (8).
Техническая реализация индикатора (6) не вызывает трудностей. См. 1. Литвак И.И. и др. Основы построения аппаратуры отображения в автоматизированных системах - М.: Изд-во "Сов. радио", 1975. 2. А.Н. Романов. Тренажеры для подготовки операторов РЛС с помощью ЭВМ - М.: Воениздат, 1980, с. 61.
7. Блок имитации антенны и формирования развертки азимута (7) предназначен для создания линейно-изменяющегося магнитного поля в горловине ЭЛТ (34), вращающегося синхронно с вращением имитируемой антенны.
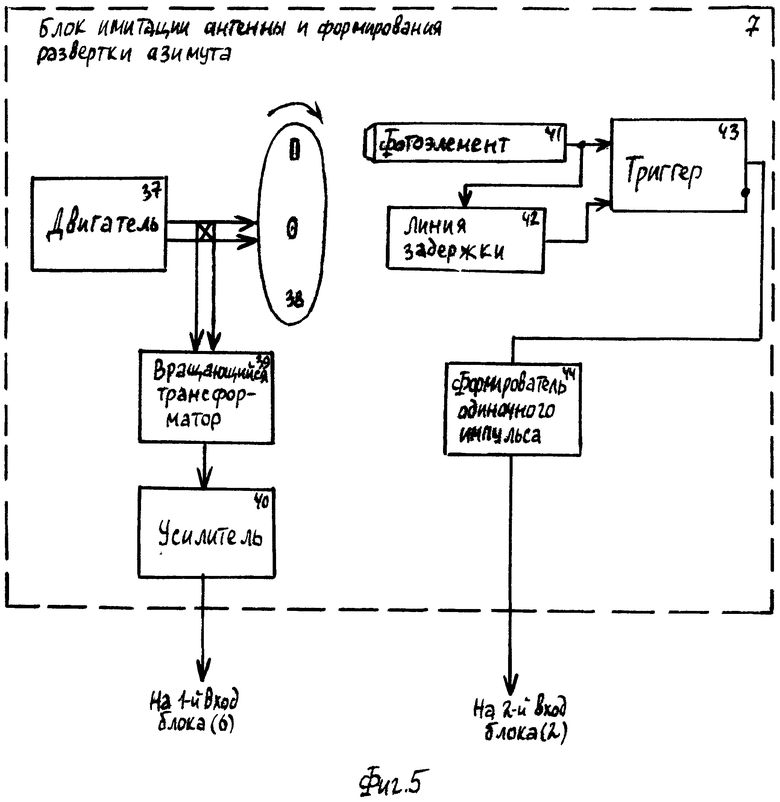
Блок-схема блока имитации антенны и формирования развертки азимута (7) приведена на фиг. 5.
Елок имитации, антенны и формирования развертки азимута (7) включает в себя двигатель (37), диск с прорезью (38), вращающийся трансформатор (39), усилитель (40), фотоэлемент (41), линию задержки (42), триггер (43) и формирователь одиночного импульса (44), при этом двигатель (37) механически соединен с диском (38) и вращающимся трансформатором (39), выход которого подключен к входу усилителя (40), выход которого в свою очередь подключен к первому входу индикатора (6), выход фотоэлемента (41) подключен одновременно к входу линии задержки (42) и первому входу триггера (43), к второму входу которого подключен выход линии задержки (42), вход и выход формирователя одиночного импульса (44) подключены соответственно к выходу триггера (43) и второму входу логического элемента "И" (2).
Первая отклоняющая катушка ЭЛТ (34), входящая в состав индикатора (6), состоит из двух пар катушек, расположенных взаимно перпендикулярно относительно оси ЭЛТ (34). Через эти катушки протекают пилообразные токи, промодулированные по закону вращения, создаваемому блоком имитации антенны и формирования развертки азимута (7), и взаимно сдвинутые по фазе на 90°. Эти токи создают синхронно вращающееся магнитное поле, которое отклоняет электронный луч.
Для расщепления и сдвига фазы используется синусно-косинусный вращающийся трансформатор (39) и синусно-косинусный потенциометры, которые механически надежны и непосредственно нагружаются на отклоняющие катушки ЭЛТ (34). При вращении диска (38) с прорезью, насаженного на вал двигателя (37), на единичный вход триггера (43) поступает импульс, вырабатываемый фотоэлементом (41) в момент прохождения "направления на север", устанавливающий триггер (43) в единичное состояние и управляющий тем самым формирователем единичного импульса (44). Этим же импульсом, прошедшим через линию задержки (42), выход которой подключен к нулевому входу триггера (43), триггер (43) устанавливается в исходное состояние.
Таким образом, фиксируется момент прохождения имитируемой антенной условного нулевого направления ("направление на север"), что необходимо для функционирования устройства для имитации пространственного положения целей на экране индикатора.
Техническая реализация составных частей блока имитации антенны и формирования развертки азимута (7) подробно описана в специальной технической литературе. См. Г.П. Тверской и др. Имитаторы эхо-сигналов судовых радиолокационных станций. - Л., Изд-во "Судостроение", 1973. 2. А.Н. Романов. Тренажеры для подготовки операторов РЛС с помощью ЭВМ - М., Воениздат, 1980.
8. Блок формирования развязки дальности (8) предназначен для синхронизации работы индикатора (6).
Блок-схема блока формирования развертки дальности (8) приведена на фиг. 6.
Блок формирования развертки дальности (8) включает в себя последовательно соединенные расширитель импульсов (45) и генератор пилообразного тока (46), при этом вход расширителя импульсов (45) подключен к первому выходу счетчика импульсов меток дальности (3), выход генератора пилообразного тока (46) подключен к третьему входу индикатора (6).
Техническая реализация формирования развертки дальности (8) не вызывает проблем.
См. 1. А.Н. Романов. Тренажеры для подготовки операторов РЛС с помощью ЭВМ - М.: Воениздат, 1980. 2. П. Хоровиц, У. Хилл. Искусство схемотехники. Том I. Перевод с англ. под ред. М.В. Гальперина - М.: Мир. 1983.
9. Микропроцессорная система (10) предназначена для улучшения эксплуатационной характеристики устройства, в частности ЭВМ (4) и предоставляет разработчику гибкие программные средства для организации управления режимами работы устройства и имитации с достаточной точностью пространственного положения на экране индикатора (6).
Блок-схема микропроцессорной системы (10) приведена на фиг. 7.
Микропроцессорная система (10), построенная на основе микросхем серии КР580, включает в себя центральное процессорное устройство (47), постоянное запоминающее устройство (48), оперативное запоминающее устройство (49), устройство ввода-вывода (50), шину данных (51), шину адреса (52) и шину управляющих сигналов (53), при этом шина данных (51) обеспечивает двунаправленную связь с центральным процессорным устройством (47), постоянным запоминающим устройством (48), оперативным запоминающим устройством (49) и устройством ввода-вывода (50), шина адреса (52) обеспечивает связь с постоянным запоминающим устройством (48), оперативным запоминающим устройством (49) и устройством ввода-вывода (50), шина управляющих сигналов (53) обеспечивает двунаправленную связь с центральным процессорным устройством (47), постоянным запоминающим устройством (48), оперативным запоминающим устройством (49) и устройством ввода-вывода (50), вход и выход центрального процессорного устройства (47) подключены соответственно к выходу ЭВМ (4) и второму входу вентиля (11), вход устройства ввода-вывода (50) подключен к второму выходу счетчика импульсов-меток дальности (3).
Модуль центрального процессорного устройства (47) производит необходимые действия по программе, управляет передачей данных в систему и выдачей данных из нее, вырабатывает необходимый набор управляющих сигналов для всех устройств системы. Все управляющие сигналы системы объединены в шину управляющих сигналов (53).
Шина данных (51) - двунаправленная, предназначена для передачи информации между модулями центрального процессорного устройства (47) и постоянным запоминающим устройством (48) или оперативным запоминающим устройством (49), или устройством ввода-вывода (50).
Шина адреса (52) - однонаправленная. Имеющаяся на ней информация указывает определенную область запоминающих устройств (48), (49) или устройство ввода-вывода (50), к которым обращается модуль центрального процессорного устройства (47).
Шина управляющих сигналов (53) - однонаправленная, содержит набор сигналов, которые вырабатывает модуль центрального процессорного устройства (47) и сигналы, которые вырабатывают внешние устройства.
Модуль центрального процессорного устройства (47) в простейшем случае состоит из центрального обрабатывающего устройства и генератора тактовых импульсов.
Центральное процессорное устройство (47) устанавливается в исходное состояние по программе или при включении питания. Начиная от исходного состояния, модуль центрального процессорного устройства (47) работает по программе до тех пор, пока на вход "Готовность" микропроцессора подается логическая "1" и не поступает сигнал прерывания или сигнал "Захват", выдаваемые внешними устройствами.
При работе с запоминающими устройствами (48), (49) или устройством ввода-вывода (50) модуль центрального процессорного устройства (47) выполняет операции в такой последовательности: выдает управляющие сигналы на шину управляющих сигналов (53) и двоичный код на шину адреса (52), определяет области запоминающих устройств (48), (49) или устройств ввода-вывода (50), которые будут использованы в данном цикле обращения, получает информацию из выбранного запоминающего устройства (48), (49) или устройства ввода-вывода (50), или передает им информацию, производит обработку информации, передает (если необходимо по программе) информацию в запоминающие устройства (48), (49) или устройство ввода-вывода (50).
Центральное процессорное устройство (47) получает из постоянного запоминающего устройства (48) команды программы и производит передачу данных в оперативное запоминающее устройство (49) и устройство ввода-вывода (50) или получает данные из них.
Связь между устройствами системы (10) имеет магистральную структуру. Если система не является магистрально-организованной, то это может потребовать использования большого количества внешней аппаратуры для распределения информации по параллельным входам и выходам. Применение магистральной организации уменьшает число необходимых схем сопряжения, обеспечивает возможность расширения и позволяет реализовать режим прямого доступа к памяти.
8-разрядная шина данных состоит из восьми двунаправленных линий, т.е. по одним и тем же линиям информация может как приниматься, так и передаваться относительно одного и того же устройства.
Магистраль обеспечивает такие типы обмена информацией: программный в режиме прямого доступа к памяти (ПДП) и в режиме прерывания программы.
Программный обмен информацией - это передача информации по инициативе и под управлением программы.
Обмен информацией по инициативе внешних устройств может выполняться в режиме прямого доступа к памяти и в режиме прерывания программы.
Обмен в режиме прямого доступа к памяти является самым доступным способом передачи данных между запоминающим устройством и внешними устройствами. При этом обмене не изменяется внутреннее состояние микропроцессора (47). Поэтому обмен данных может выполняться в интервале времени, когда микропроцессор (47) под действием сигнала "Захват", выдаваемого внешними устройствами передает управление шинами внешним устройствам. Адресация и управление размерами передаваемого массива данных находится под управлением устройства, получившего прямой доступ к памяти без вмешательства микропроцессора (47).
Устройство, запросившее прямой доступ к запоминающему устройству, само вырабатывает сигналы управления. Массивы данных в режиме прямого доступа к запоминающему устройству могут передаваться со скоростью, определяемой быстродействием запоминающего устройства.
Обмен информацией в режиме прерывания программы - это выполнение программы обслуживания по требованию внешнего устройства. Центральный процессор (47) при этом приостанавливает выполнение текущей программы, чтобы обслуживать запрашивающее устройство. После завершения выполнения программы обслуживания прерывания микропроцессор (47) возобновляет выполнение основной программы с того места, где она была прервана.
Каждое устройство микропроцессорной системы (10) имеет приемники и передатчики информации. В модуле центрального процессорного устройства (47) передатчиками являются буферы адреса и данных. Приемниками являются буферы данных. Наиболее целесообразным при использовании микросхем серии КР580 является способ организации шины с применением передатчиков с трехстабильным выходом. Использование треть его состояния позволяет просто принимать информацию с шины или выдавать ее на шину, переводя в отключенное состояние буферы адреса и данных тех устройств системы, которые не действуют в данный момент в обмене информацией.
Техническая реализация микропроцессорной системы на базе микросхем серий КР580 подробно описана в специальной литературе. См. Микропроцессоры. Справочное пособие для разработчиков судовой РЭА. Под ред. Ю.А. Овечкина - Л., Судостроение, 1987.
10. Вентиль (11) предназначен для выполнения функции управления. Блок-схема вентиля приведена на фиг. 8.
Вентиль (11) включает в себя последовательно соединенные линию задержки (54), триггер (55) и логический элемент "И" (50), при этом единичный вход триггера (55) и вход линии задержки (54) соединены с первым выходом микропроцессорной системы (10), второй вход логического элемента "И" (56) и его выход соответственно подключены к выходу ЭВМ (4) и входу блока согласования (5).
Техническая реализация вентиля (11) не представляет никаких проблем. См. Справочник по цифровой вычислительной технике. Под ред. Б.Н. Малиновского - К.: Изд-во "Технiка", 1974.
Рассмотрим функционирование устройства для имитации пространственного положения целей на экране индикатора (фиг.1). Отображение отраженных от цели эхо-сигналов, связанных с пространственным положением цели, осуществляется на экране ЭЛТ (34), входящей в состав индикатора (6).
Блок имитации антенны и формирования развертки азимута (7) формирует развертку азимута на экране ЭЛТ (34) и в момент прохождения начала отсчета азимута ("направление на север") открывает логический элемент "И" (2), к входу которого подключен высокостабильный генератор импульсов-меток дальности (1). Через логический элемент "И" (2) импульсы-метки дальности поступают на вход счетчика импульсов-меток дальности (3), который кроме их счета формирует импульсы запуска развертки дальности, частота следования которых в n раз меньше частоты следования импульсов-меток дальности. С этой целью двоичный код с выходов n-триггеров счетчика импульсов-меток дальности (3) поступает в схему совпадения (15), сигнал на выходе которой появляется только тогда, когда на выходах всех n-триггеров будут логические "1". Таким образом, каждый период развертки дальности всегда содержит одинаковое число импульсов-меток дальности.
Импульсы запуска развертки дальности, снимаемые с выхода счетчика импульсов-меток дальности (3), поступают одновременно на входы блока формирования развертки дальности (6) и счетчика импульсов азимута (9). Счетчик импульсов азимута (9) подсчитывает число поступающих импульсов запуска развертки дальности и тем самым в каждый момент времени фиксирует текущее положение (угловое) луча радиально-круговой развертки по азимуту. После полного оборота луча радиально-круговой развертки на 360° счетчик импульсов азимута (9) сбрасывается и вновь начинается подсчет импульсов, поступающих на его вход.
В процессе работы устройства для имитации пространственного положения целей на экране индикатора каждый импульс запуска развертки дальности, поступая через систему прерывания в устройство управления ЭВМ (4), переводит ее на подпрограмму опроса содержимого счетчика импульсов азимута (9) и сравнения его показаний с ближайшим текущим значением азимута цели, хранимым в оперативной памяти ЭВМ (4). В случае, если показания счетчика импульсов азимута (9) не соответствуют ближайшему текущему значению азимута цели, то ЭВМ (4) возвращается на основную программу, не связанную с имитацией отметок целей. В противном случае она переходит на вторую подпрограмму непрерывного опроса содержимого счетчика импульсов-меток дальности (3) и сравнения его показаний с ближайшим текущим значением дальности цели, находящейся на зафиксированном азимуте. Одновременно с этим показания счетчика импульсов-меток дальности (3) поступают в микропроцессорную систему (10), где при наличии сигнала управления с третьего выхода ЭВМ (4) центральное процессорное устройство (47) переходит на подпрограмму учета флюктуации выходной мощности передающего устройства активной РЛС, условий распространения сигналов на трассе и дальности от активной РЛС до цели. При выполнении данной подпрограммы определяется мощность сигнала на входе приемного устройства с учетом перечисленных выше воздействующих факторов, после чего она (входная мощность) анализируется с целью определения факта приема сигнала, излученного активной РЛС и отраженного от цели.
Управляющий сигнал формируется в такой ситуации. Как только текущее значение дальности цели будет точно соответствовать показанию счетчика импульсов-меток дальности (3), ЭВМ (4) выдает на вход вентиля (11) сигнал "Включить на развертке дальности индикатора импульс цели". Вентиль (11) закрыт до тех пор, пока микропроцессорная система (10) не установит факт приема приемным устройством активной РЛС данного сигнала. Как только входная мощность излученного и отраженного от цели сигнала будет достаточной для его приема, т.е. превосходит пороговое значение, микропроцессорная система (10) сформирует сигнал, который откроет вентиль (11). Сигнал "Включить на развертке дальность индикатора импульс цели" пройдет через вентиль (11) на вход блока согласования (5) и далее на смеситель (32) индикатора (6). Поскольку число принятых активной РЛС импульсов в пачке цели является случайной величиной и зависит от многих факторов, то конкретное значение ширины пачки цели устанавливается программой работы ЭВМ (4) в соответствии с имитацией скорости вращения и ширины ДН антенны.
Определение входной мощности сигнала ЭВМ (4) не осуществляет, так как с началом прямого хода развертки дальности ЭВМ (4) решает только задачу формирования отметки цели с учетом скорости вращения и ширины ДН антенны.
Для имитации очередных, следующих за первым К-1 импульсов цели на смежных линиях развертки дальности ЭВМ (4), еще К-1 раз выдает сигнал о включении на развертке дальности импульса цели в момент равенства текущих значений дальности и показаний счетчика импульсов-меток дальности (3). При этом микропроцессорная система (10) К-1 раз будет проверять условие превышения входной мощности отраженных эхо-сигналов порогового уровня приемного устройства активной РЛС и в случае его выполнения формировать сигнал управления, который регламентирует работу вентиля (11), т.е. открывает его для прохождения на вход блока согласования (5) сигнала "Включить на развертке дальности индикатора импульс цели".
Рассмотренная выше микропроцессорная система (10) реализует алгоритм определения входной мощности принятого активной РЛС эхо-сигнала и сравнения ее с пороговым уровнем, приведенный в операторном виде:

Алгоритм начинается с оператора А1, который опрашивает содержимое ячейки памяти, хранящей признак условий распространения сигналов на трассе, который задается априори. Оператор А2 по признаку условий распространения осуществляет выборку определенного коэффициента потерь L. Далее оператор В3 генерирует случайную величину ξ, распределенную по нормальному закону с параметрами /0, 1/ и передает управление оператору В4. Оператор В4 вычисляет текущее значение излучаемой энергии в импульсе по формуле Pt·τ=Pt·τ±ξ·σ,
где σ - среднеквадратическое значение, задаваемое априори.
Величина Pt·τ, таким образом, будет учитывать колебания выходной мощности передающего устройства активной РЛС. Как только будет определена величина Pt·τ, управление передается оператору В5, который по формуле (уравнение радиолокации)

определяет энергетический коэффициент Rd, который непосредственно будет характеризовать входную мощность принятого эхо-сигнала. Логический оператор Р6 сравнивает энергетический коэффициент Rd с пороговым значением Р, которое задается как уже указывалось априори с учетом приемного энергетического потенциала приемного устройства активной РЛС. Если Rd>P, то управление передается оператору B7, который обеспечивает формирование и выдачу сигнала управления для регламентирования работы вентиля (11). В противном случае управление передается оператору останова Я8.
В приведенной формуле (2) используются следующие параметры:
Gt - усиление приемно-передающего антенного устройства;
N - длина волны;
L - коэффициент потерь для различных условий распространения сигнала на трассе;
F4 - коэффициент при двухпутевом многолучевом распространении;
σэф - эффективная поверхность рассеяния цели;
Pt·τ - излучаемая энергия в импульсе;
k·T - эффективная плотность белого шума;
Rd - энергетический коэффициент;
R - дальность между активной РЛС и целью.
Учитывая, что соотношение между прямым и обратным ходом развертки дальности типового индикатора (6) кругового обзора составляет примерно 10:1, можно сделать вывод, что 90% всего времени работы ЭВМ (4) будет занята решением только одной задачи (формирования метки цели) и 10% будет свободна для решения других задач. Этого времени и памяти ЭВМ (4) явно недостаточно для определения входной мощности имитируемого отражения эхо-сигнала, поэтому эта задача реализуется микропроцессорной системой (10).
Введение в устройство для имитации пространственного положения целей на экране индикатора микропроцессорной системы (10) и вентиля (11) улучшает эксплуатационные характеристики устройства и дает возможность повысить точность имитации эхо-сигналов на экране индикатора (6) путем учета их флюктуации, вызванных колебаниями выходной мощности передающего устройства активной РЛС, условиями распространения сигналов на трассе и дальностью до цели.
Устройство для имитации пространственного положения целей на экране индикатора будет использовано в специализированном тренажере, предназначенном для подготовки операторов активных РЛС навыкам их боевой эксплуатации.
При использовании предлагаемого устройства ожидается повышение точности имитации эхо-сигналов на экране индикатора путем учета их флюктуации из-за колебаний выходной мощности передающего устройства активной РЛС, условий распространения сигналов на трассе, дальности до цели, скорости вращения и ширины ДН антенны активной РЛС. Тем самым возрастает эффективность использования устройства в целях обучения личного состава ВМФ по управлению и применению активных РЛС в различных тактических ситуациях на предполагаемом театре военных действий.
Результаты макетирования и математического моделирования работы устройства подтвердили его эффективность с точки зрения повышения точности, имитируемых эхо-сигналов, излученных активной РЛС и отраженных от наблюдаемого объекта с учетом условий реальной обстановки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЦЕЛЕЙ НА ЭКРАНЕ ИНДИКАТОРА | 1987 |
|
SU1841027A2 |
| Устройство для обучения операторов | 1974 |
|
SU543980A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841103A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| Устройство для обучения операторов радиолокационных станций | 1980 |
|
SU955174A1 |
| Тренажер оператора радиолокационных систем | 1981 |
|
SU976471A1 |
| Тренажер для обучения операторов радиолокационной станции наведения | 1974 |
|
SU525999A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841104A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| ИМИТАТОР ПАССИВНОГО РАДИОЛОКАТОРА | 1988 |
|
SU1841093A2 |

Изобретение относится к учебно-техническим средствам и может быть использовано для подготовки операторов радиолокационных систем (РЛС). Устройство для имитации пространственного положения целей на экране индикатора содержит генератор импульсов-меток дальности с одним выходом, элемент «И» с двумя входами и одним выходом, счетчик импульсов-меток дальности с одним входом и двумя выходами, блок имитации антенны и сформирования развертки азимута с двумя выходами, индикатор с тремя входами, блок формирования развертки дальности с одним входом и выходом, блок согласования одним входом и выходом, счетчик импульсов азимута одним входом и выходом, вентиль с двумя входами и одним выходом, блок имитации текущих координат наблюдаемых объектов с тремя входами и одним выходом, блок определения и анализа входной мощности (БОАВХ) принятия активной РЛС эхо-сигналов с двумя входами и одним выходом. БОАВХ принятия активной РЛС эхо-сигналов содержит дешифратор, блок памяти, четыре умножителя, пять регистров констант, два входных регистра, два элемента «ИЛИ», два элемента «И», делитель, схему сравнения, генератор случайных чисел, сумматора. Изобретение позволяет повысить точность имитации эхо-сигналов, принятых РЛС при наблюдении за объектами. 1 з.п. ф-лы, 8 ил.
1. Устройство для имитации пространственного положений целей на экране индикатора, содержащее последовательно соединенные генератор импульсов-меток дальности, элемент И, счетчик импульсов-меток дальности и блок имитации текущих координат наблюдаемых объектов, последовательно соединенные блок согласования и индикатор, блок имитации антенны и формирования развертки азимута, блок формирования развертки дальности и счетчик импульсов азимута, причем второй вход элемента И подключен к первому выходу блока имитации антенны и формирования развертки азимута, второй выход которого подключен к второму входу индикатора, второй выход счетчика импульсов-меток дальности подключен к второму входу блока имитации текущих координат наблюдаемых объектов, третий вход которого подключен к выходу счетчика импульсов азимута, третий вход индикатора подключен к выходу блока формирования развертки дальности, первый выход счетчика импульсов-меток дальности подключен к входам блока формирования развертки дальности и счетчика импульсов азимута, отличающееся тем, что, с целью повышения точности имитации эхо-сигналов на экране индикатора путем учета их флюктуаций в зависимости от колебаний выходной мощности передающего устройства активной радиолокационной станции и условий распространения сигналов, в него введены вентиль, блок определения и анализа входной мощности принятого активной радиолокационной станцией эхо-сигнала, первый, второй входы и выход которого подключены соответственно к второму выходу счетчика импульсов-меток дальности, выходу блока имитации текущих координат наблюдаемых объектов и первому входу вентиля, второй вход и выход которого подключены соответственно к выходу блока имитации текущих координат наблюдаемых объектов и входу блока согласования.
2. Устройство по п. 1, отличающееся тем, что блок определения и анализа входной мощности принятого активной радиолокационной станцией эхо-сигнала выполнен в виде последовательно соединенных первого входного регистра, первого элемента И, дешифратора, блока памяти, первого элемента ИЛИ, второго элемента ИЛИ, первого умножителя, второго умножителя, делителя и схемы сравнения, последовательно соединенных генератора случайных чисел, второго элемента И, третьего умножителя, сумматора и четвертого умножителя, первого, второго, третьего, четвертого, пятого регистров констант и второго входного регистра, при этом вторые входы первого и второго элементов И подключены к выходу блока имитации текущих координат наблюдаемых объектов, второй, третий и четвертый выходы дешифратора подключены соответственно к второму, третьему и четвертому входам блока памяти, второй, третий и четвертый выходы которого подключены соответственно к второму, третьему входам первого элемента ИЛИ и второму входу второго элемента ИЛИ, выход первого регистра констант подключен к второму входу первого умножителя, выход второго входного регистра, вход которого подключен к выходу счетчика импульсов-меток дальности, подключен к второму входу второго умножителя, выходы второго, третьего, четвертого и пятого регистров констант подключены соответственно к вторым входам третьего умножителя, сумматора, четвертого умножителя и схемы сравнения, выход которой подключен к второму входу вентиля, второй вход делителя подключен к выходу четвертого умножителя.
| 1972 |
|
SU417808A1 |

