Изобретение относится к электрическим машинам, а именно к электрическим двигателям постоянного тока с бесконтактной коммутацией и датчиком положения ротора, т.е. вентильньм электродвигателем, и предназначено для настройки в процессе изготовле ния и эксплуатации машин, работающих в качестве исполнительных моментных вентильных электродвигателей (МВД) систем автоматического управления.
Цель изобретения - расширение эксплуатационных возможностей за счет обеспечения возможности настройки ВД, содержащего п электромеханических преобразователей, работающих на общую нагрузку.
На чертеже представлена функцио- нальная схема вентильного электродвиг гателя и- стенда, реализую1чего способ.
При настройке ВД устанавливают электротехнический узел, включающий П электромеханических прербразовате- лей (ЭМ11) 1 с постоянными магнитами на роторе 2 и фазами синусной 3 и косинусной А двухфазной обмоток якоря, расположенными на статоре под углом 90 эл, град, друг относительно друга, причем роторы и стйторы ЭМП 1 произ- вольно расположены друг отно ситель но друга а также объект 5 управления и датчик 6 положения ротора (ДПР) с цепью 7 питания и расположенными на нем выходной синусной фазой 8 вторичной двухфазной обмотки, причем ро«- торы 2 кинематически соединены с ектЪм 5 управления и валом ДПР 6 в настроечный стенд 9.
Стенд 9 содержит источник 10 питающего напряжения ДПР, источник 11 номинального постоянного напряжения, источник 12 максимального постоянного напряжения, переключающую кнопку 13, вольтметр 14, а также тумблеры 15 - 17.
На синусную обмотку 3 первого ЭМП 1 путем включения тумблера 15 подают номинальное постоянное напряжение от источника 11 и питающее напряжение на вход ДПР 6 от источника 10 « подключают вольтметр 14 к синусной фазе 8 ДПР 6.
Кратковременно, путем нажатия переключающей кнопки 13, на синусную обмотку 3 первого ЭМП 1 подают максимальное напряжение от источника 12.
Поворачивают статор ДПР 6 относительно статора первого ЭМП 1 до поло
Q
5
0
5 Q
л .е
5
0
5
жения, при котором обеспечивается минимальное напряжение, измеряемое вольтметром 14,
Согласно предлагаемому способу дополнительно осуществляют следующие операции.
Отключают питающее напряжение от синусной фазы первого ЭМП и подают с помощью тумблера 16 номинальное постоянное напряжение от источника М на синусную фазу в орого ЭМП. ковременно, путем нажатия переключающей кнопки 13, на синусную фазу 3 второго ЭМП 1 подают максимальное напряжение от источника 12.. Статор второго ЭМП 1 поворачивают до положения,, при котором достигают минимальное напряжение на вольтметре 14.
Операции j начиная с отключения питат1Я ДПР, повторяют для остальных ЭМПэ С помощью тумблеров 15 - 17 од«- новременно подшот на синусные фазы 3, всех ЭМП I номинальное напряжение .от источника П , затем, кратковре-/. менно, путем на} сатия переключающей .кнопки 13, на синусные фазы 3 всех. ЭМП подают максимальное напряжение от источника 12 и разворачивают статор ДПР б относительно его ротора до положения, при котором достигается г-шнимальное напряжение на вольтметре 14,
При подаче номинального напряжения от источника 11 на синусную фазу 3 первого ЭМП 1 на его валу возникает вращающий момент
Mg,KFc, Mg, sino(i ,(1)
з: де Mg, - максимальный вращающий
момент;
Fp, - магнитодвижущая сила (МДС) в воздушном зазоре, созда«- ваемая ротором первого ЭМП; FC МДС в воздущном зазоре,
создаваемая синусной фазой статора первого ЭМП; oil угол между векторами F
и F р, ;
К - коэффициент пропорциональности.
Под действием вращающего момента М ротора 2 все ЭМП будут поворачиваться до тех пор, пока угол .е(, а следовательно, и М не будут равны- 1УГИ нулю.
В реально.м объекте из-за наличия трения роторы 2 повернутся не. до зна314362
чения о( Q, а до величины о /, , обусловленного напряжения трогания ЭМП 1 с нагрузкой 5 и определяемого по формуле
/ . UTP
«, arcs in г,---
rfoM
Для уменьшения величины с, , а следовательно, и повышения точности ю настройки на синусную фазу 3 первого ЭМ11 1 кратковременно подают максимальное напряжение и„ от источника 2 с помощью переключающей kHonKH 13, Длительность подачи напряжения Цд, 15 должна удовлетворять условияю
t - (5 - 0)Т
пр
где Т
пр
постоянная време1-ш двигателя с учетом инерционной 20 нагрузки„
Поскольку напряжение tJ в двигателе с нагрузкой сохраняется, то рото- ры 2 двигателей дополнительно довернутся, что уменьЕшт угловую ошибку o(i 25 о значения
/1 и тр о( - arcsin --- и м
После подачи максимального напря- женин на синусную фазу 3 первого ЭМП статор ДОР находится относительно сво I его ротора в произвольном положении, ;поэтому на выходе синусной фазы 8 :ДПР 6 имеется некоторое напряжение.
Чтобы момент, развиваемый ЭМП 1 в ;системе, был максимален, необходимо :развернуть статор Д1Р 6 относительно ротора до положения, при котором ;достигается минимум напряжения на
вольтметре 14. Этим обеспечив.ается предварительная настройка первого ЭМП ч
Предварительная настройка второго ЭМП осуществляется поворотом их статоров до положения, при котором обеспечивается минимальное значение налря кения на вольтметре 14. При по очередной подаче на синусную обмотку 3 ЭМП 1 номинального и максимального напряжений происходит поворот ро ГЬров 2 всех ЭМП под действием вращающего MOifieHTa, создаваемого МДС ротора F р и статора FCI в воздушном зазоре
второго ЭМП
Mg KFp2-F sin М j sineC/i , (5)
где М „„ - максимальньй вращающий момент второго ЭМП;
13
of-2 - угол между векторами Fj.,
и F
рг
ю 15
20
-25
30 -
о
.
Поскольку роторы и статоры первого 3 второго ЭМП расположены друг относительно друга произвольно, то напряжение на выходе синусной фазы 8 ДПР 6 не будет минимальным.
Для того, чтобы момент, развивае - , мый вторым ЭМП 1 в системе был макси малек, необходимо развернуть статор второго ЭМП 1 относительно статора первого синхронного двигателя до достижения минимума напряжения по вольтметру 14. При развороте статора второго ЭМП под действием Mg происходит поворот всех роторов 2, а также и ротора ДПР 6 относительно его статора. Аналогично производится предварительная настройка и остальных ЭМП.
Поскольку параметры ЭМП отличаются друг от друга за счет технологического разброса, угловые ошибки of, выставки согласно формуле (4) буг дут различны-и равны.
,w з -. c
Следовательно, если на синусные фазы всех двигателей подать поочередно номинальное и максимальное напряжения, то показания вольтметра 1А не будут минимальными. Поэтому требуется проведение еще одной операции - операции усреднения или окончательной выставки начального положения ДПР 6, которая заключается в развороте стато ра ДПР 6 относительно его ротора до достижения минимума напряжения на вольметре 14.
При этом усредненная погрешность выставки датчика 6 будет равна
+ .
п
(6)
Если настроенный таким образом электромеханический узел МВД включить совместно с электронным узлом, т.е. синусную и косинусную фазы ДПР С подключить через усилители к соответ ствуюпщм статорным фазам ЭМП 1, то напряжение на синусных фазах 3 будет .равно нулю, так к ак при настройке разворотом статора ДПР 6 получено минимальное напряжение в синусной фазе ДПР 6, соответственно в косинусных - максимальное.
При этом вращаюш й момент параллельно включенных ЭМП равен
14362
М
вм
sin (90°+ (.. ).
Поскольку настройкой добиваются
значения o/f.
О, то вращающий момент, развиваемый двигателями при
работе на общую нагрузку, максимален.
,
Формула изобретения
Способ настройки вентильного электродвигателя, содержащего п электромеханических преобразователей, каждый из которых содержит ротор и статор с двухфазной обмоткой якоря, с механически соединенными между собой рото- рами и синусно-косинусным датчиком положения ротора-с первичной обмоткой и двухфазной вторичной обмоткой, включающий в себя установку двигателя в испытательный стевд, подачу на датчик положения ротора питающего напряжения, поочередную подачу на
136
синусную фазу электромеханического преобразователя номинального и максимального постоянного напряжения и фиксацию минимального напряжения на синусной обмотке датчика положения потока, отличающийся тем, что с целью расширения эксплуатационных возможностей, поворачивают - статор остальных п-1 электромеханичег ских преобразователей до получения минимального напряжения на синусной фазе датчика положения ротора, подают максимально по условиям нагрева напряжения на синусные обмотки всех электромеханических преобразователей в течение времени, необходимого для поворота роторов в установленном положении, и поворачивают статор датчика положения ротора до положения, в котором напряжение на его синусной , обмотке мишшально,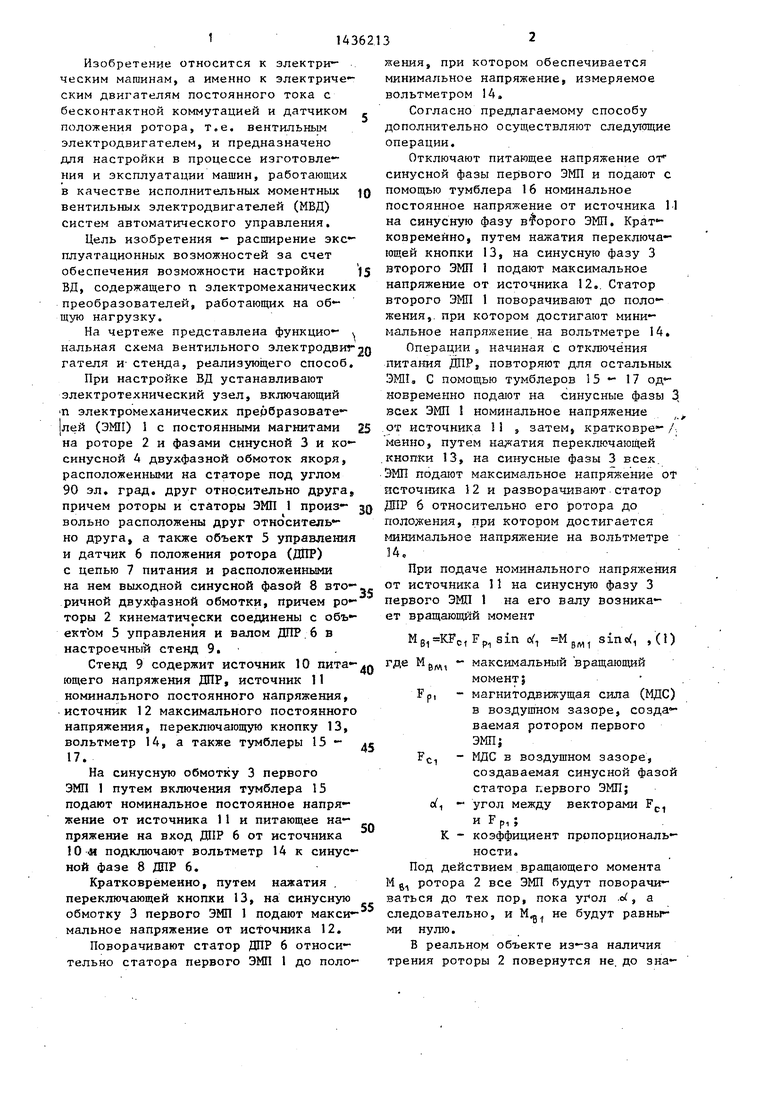
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки моментного вентильного электродвигателя | 1985 |
|
SU1288833A1 |
| Способ настройки моментного вентильного электродвигателя | 1981 |
|
SU1008857A1 |
| Способ настройки моментного вентильного электродвигателя | 1989 |
|
SU1690097A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1985 |
|
SU1275678A1 |
| Способ настройки моментного вентильного электродвигателя | 1985 |
|
SU1275677A1 |
| Способ настройки вентильного электродвигателя | 1989 |
|
SU1742951A1 |
| Способ настройки высокомоментного бесконтактного двигателя постоянного тока | 1991 |
|
SU1804684A3 |
| Моментный вентильный электродвигатель | 1981 |
|
SU995218A1 |
| Способ настройки вентильного электродвигателя | 1989 |
|
SU1774439A1 |
| Способ настройки моментного вентильного электродвигателя | 1987 |
|
SU1495944A1 |
Изобретение относится к электри -. чёским машинам, а именно к электрическим двигателям постоянного тока с бесконтактной коммутацией. Целью изобретения является расширение функцио нальных возможностей за счет возможно сти настройки h синхронных двигате-. лей, работающих на общую нагрузку. Для этого в способе настройки момент- ного вентильного электродвигателя, включающего в себя ротор, статор с обмоткой якоря и синусно-косинусный датчик положения ротора, содержащем операции установки настраиваемого электродвигателя с объектом управления в стенд, подачи на датчик положения ротора (ДПР) питающего напряжения, поочередной подачи на синусную обмотку двигателя номинального и максимального напряжений, разворота статора датчика положения ротора относительно статора двигателя и фиксации максимума вращающего момента по минимуму напряжения на синусной обмотке Д11Р, выставку нулевых положений двигателей, начиная с второго по п, производят по минимуму напряжения на синусной обмотке ДПР путем поочередного разворота статоров электродвигателей, а окончательную выставку нулевых положений всех двигателей производят после одновременной кратковременной подачи на синусные обмотки всех электродвигателей максимального напряжения путем разворота статора ДПР по минимуму напряжения на его синусной обмотке. 1 ил. 4 Од О) ю
fy.
Г1з
LL.
l.®3
r. I i.,i,i -. I t
| Способ настройки моментного вентильного электродвигателя | 1981 |
|
SU1008857A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ настройки моментного вентильного электродвигателя | 1985 |
|
SU1288833A1 |
