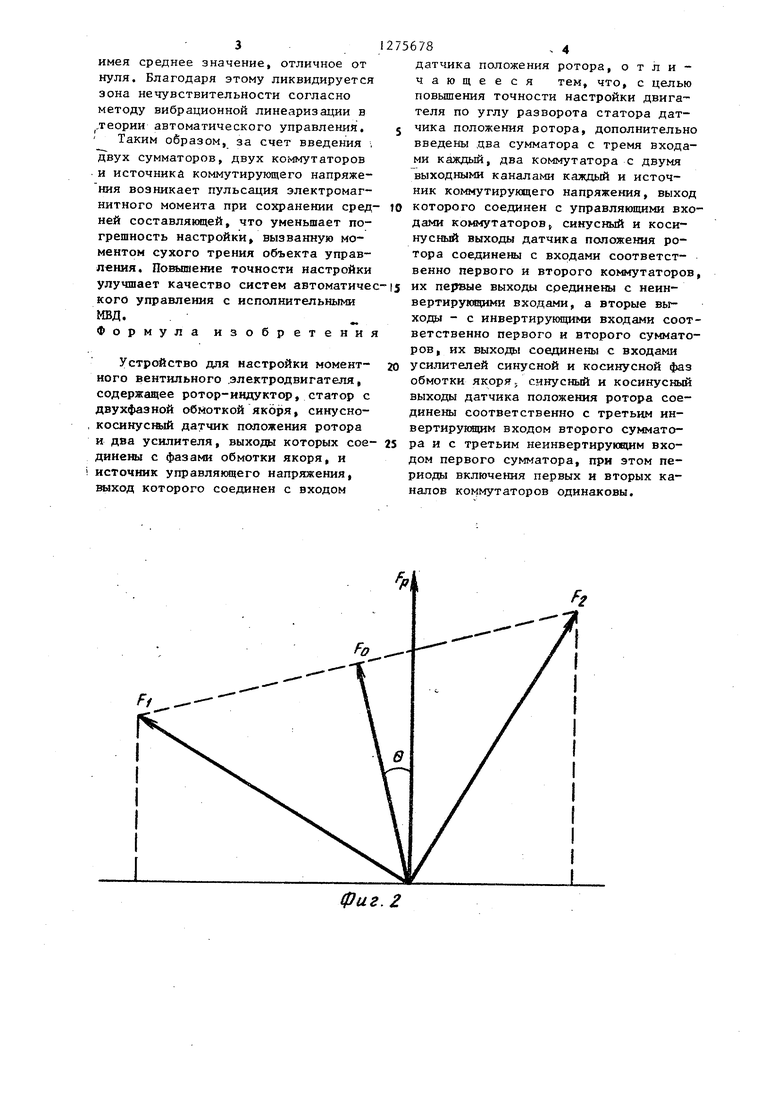
Изобретение относится к электрическим машинам,, а именно к электрическим двигателям постоянного тока с бесконтактной коммутацией, осущест вляемой с помощью полупроводниковых приборов, т.е. к моментным вентйль-ч ным электродвигателям МВД), и предназначено для настройки в процессе изготовления и эксплуатац 1и электрических машин, работакяцих в качестве исполнительных моментых двигателей приводов следящих систем и,систем стабилизации различного назначения. Цель изобретения - пошяшение точности настройки двигателя по углу разворота статора датчика положения ротора. На г. 1 представлена функциональная схема МВД и стенда настройки, на фиг. 2 - векторная, диаграмма . КДС обмотки статора в воздушном зазоре МВД, на фиг.З - график электромагнитного момента. Настраиваемый МВД 1 содержи т синх ронную машину 2, ротор 3 которой является индуктором и имеет постоянные магниты, а обмотка статора имеет синусную 4 и косинусную 5 фазы, подключеншле к выходам усилителей 6 и 7 соответственно. Датчик положения ротора 8 имеет синусный 9 и косинусный 0 выходы. С роторомсЗ мехаьтачески соединен ротор датчика положения ротора ДПР 8 и объект 1 управления. Настроеч« 1й стенд 12 имеет источник 13 управляющего сигнала, выход которого соединен с входом ДТП 8j сумматоры 14 и 15 (например, по строенные на операционцых усилителях коммутаторы 56 и 17 (например,, выполненные в виде интегратсьных микро схем) и источник 8 комментирующего напряжения (например сиЕ 1егричный полупроводниковый мультивибратор), Синусный 9 и косинусный Ш вьпсоды ДПР соединены с входами сумматоров 14 и 15 соответственно. Выход источ ника 18 соединен с управлянлщигда вхо дами коммутаторов 16 и -Г/, их первы выходы соединены с неинвертируюшими входами сумматоров 14 и-35, а вторы выходы коммутатора соединены с инвертирующими входами сумматоров 14 и 15 соответственно, Син гсный выход 9 ДПР 8 соединен с инвертируюищм третьим входом сумматора 15, а коси нусный выход 10,ДПР 8 - с йеинверти рующим третьим входом су 1матора 14 782 Выходы сумматора 14 и 15 соединены с входами усилителей 6 и 7. Периоды включения первых и вторых каналов коммутаторов одинаковы. На фиг,2 обозначенно. FK - вектор НДС ротора-индуктора, F. и К - векторы МДС обмотки статора при включении первых и вторых выходных каналов коммутаторов 9 угол отклонения статора ДПР от искомого положения, FP - вектор МДС статора в преположении отключения обоих каналов коммутаторов. На фиг.З обозначеннно, М - момент трения, Н, - электромагнитный момент МВДр М,, М - электромагнитные моменты при включении первых и вторых выходных каналов коммутаторов 16 и 17. Устройство работает следующим образом. С выхода источника 13 управляющий сигнал Ug поступает на вход ДПР 8. На его выходах 9 и 10 вырабатываются сигналы Uc - KUg sinpoCiU, KUg cospoC/; где К - коэффициент, р - число пар полюсов, оО - угол поворота ротора МВД. При включении первых каналов коммутаторов 16 и 17 эти сигналы посту-. пают на входы усилителей 6 и 7 со знаком +, а при включении вторых каналов комику т аторов 6 и 17 - со знаком - в сумме с сигналами. При правильном положении статора ДПР относительно статора синхронной машины при включении первых каналов коммутаторов 16 и 17 электромагнитный момент положителен, а при включении вторых каналов коммутаторов отрицателен, и их величины равны по модулю, превьшакщему момент трения. Ротор МВД ггри этом практически неподвижен и совершает колебания малой амплитуды. i При отклонении статора ДПР от требуемого положения на угол 0 модули электромагнитного момента на соседних интервалах различны и ротор имеет среднюю скорость, отличную от нуFj (фиг.2) ля. Векторы F, и различные проекции на ось, перпендикулярную к вектору МДС ротора , Видно, что электромагнитный момент (фиг.З) в один из периодов переключения коммутаторов или в оба периода превышает по модулю момент сухого трения, имея среднее значение, отличное от нуля. Благодаря этому ликвидируется зона нечувствительности согласно методу вибрационной линеаризации в .теории автоматического управления. Таким образом, за счет введения двух сумматоров, двух коммутаторов . и ИСТОЧНИКИ коммутирующего напряже ния возникает пульсация электромагнитного момента при сохранении сред ней составляимцей, что уменьшает погрешность настройки вызванную моментом сухого трения объекта управления. Повышение точности настройки улучшает качество систем автоматиче кого управления с исполнительными МВД, Формула изобретени Устройство для настройки моментного вентильного .электродвигателя, содержащее ротор-индуктор, статор с двухфазной обмоткой якоря, синуснокосинуси 1Й датчик положения ротора и два усилителя, выходы которых сое динены с фазами обмотки якоря, и источник управляющего напряжения, выход которого соединен с входом 678, 4 датчика положения ротора, отличающееся тем, что, с целью повышения точности настройки двигателя по углу разворота статора датчика положения ротора, дополнительно введены два сумматора с тремя входами каждый, два коммутатора с двумя выходными каналами каждый и источник коммутирующего напряжения, выход которого соединен с управлякицими входами коммутаторовf синусный и косинусный выходы датчика положегшя ротора соединены с входами соответственно первого и второго коммутаторов, их первые выходы соединены с иеинвертирукщими входами, а вторые выходы - с инвертирующими входами соответственно первого и второго сумматоров, их выходы соединены с входами усилителей синусной и косинусной фаз обмотки якоря; синусный и косинусный выходы датчика положения ротора соединены соответственно с третьим инвертируншщм входом второго сумматора и с третьим неинвертируювщм входом первого сумматора, при этом периоды включения первых и вторых каналов коммутаторов одинаковы.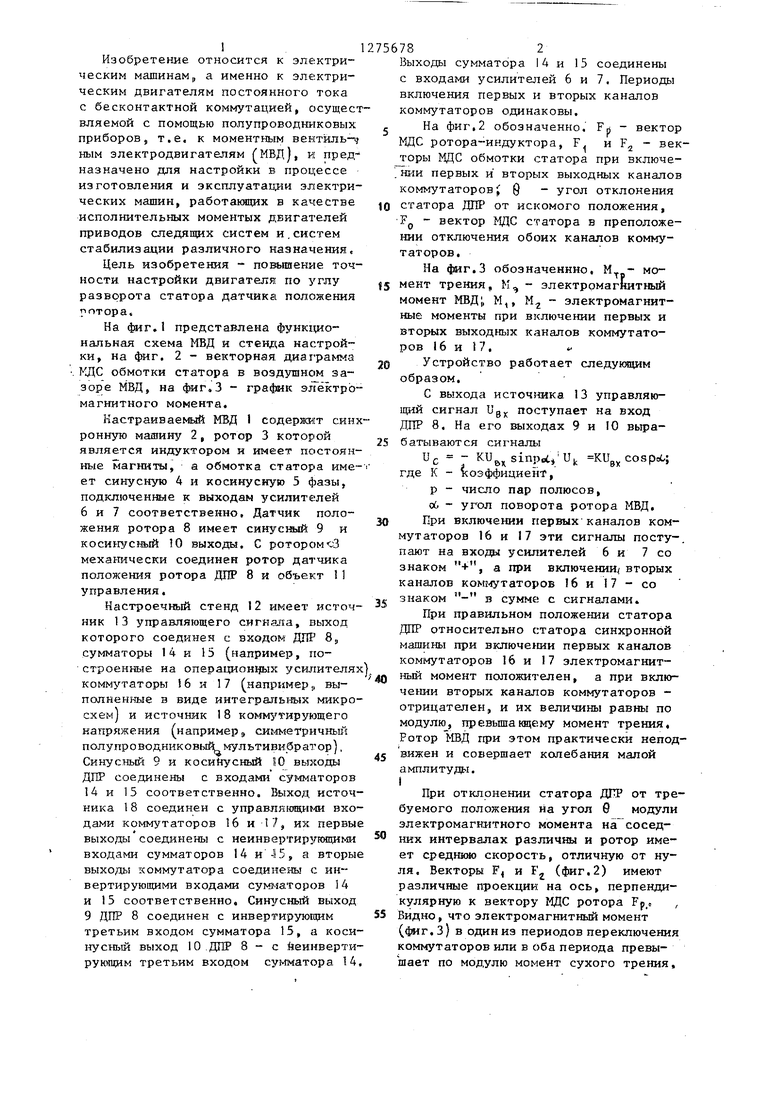
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки моментного вентильного электродвигателя | 1981 |
|
SU1008857A1 |
| Способ настройки моментного вентильного электродвигателя | 1985 |
|
SU1275677A1 |
| Способ настройки моментного вентильного электродвигателя | 1985 |
|
SU1288833A1 |
| Способ настройки вентильного электродвигателя | 1987 |
|
SU1436213A1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1989 |
|
SU1774454A1 |
| Моментный вентильный электродвигатель | 1981 |
|
SU995218A1 |
| Способ настройки высокомоментного бесконтактного двигателя постоянного тока | 1991 |
|
SU1804684A3 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742949A2 |
| Моментный вентильный электродвигатель | 1987 |
|
SU1448373A1 |
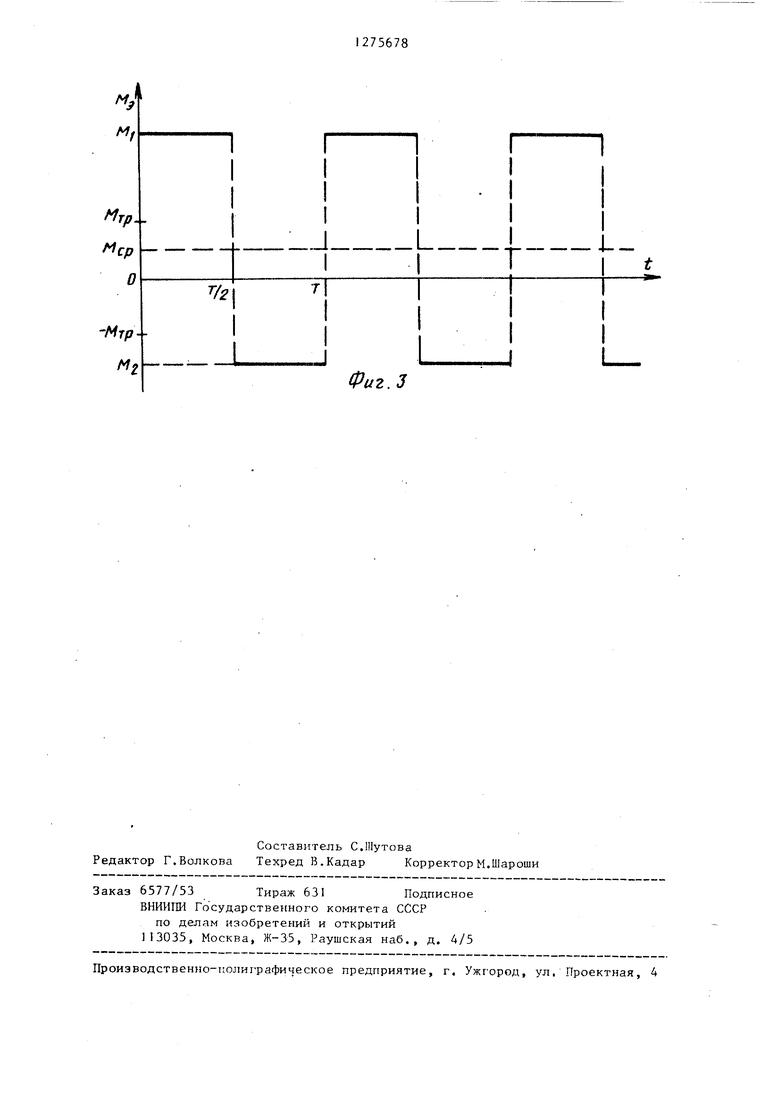
Изобретение относится к электромашиностроению и предназначено для настройки моментных вентильных двигателей (МВД) Цель изобретения повышение точности настройки МВД, по углу разворота статора датчика положения ротора. Устр-во содержит синхронную машину 2, ротор 3. Обмотка статора имеет синусную 4 и косинусную 5 фазы, подключенные к выходам усилителей 6 и 7. Датчик положения ротора 8 имеет синусный 9 и косинусный 10 выходы. С ротором 3 механически соединены ротор 8 и объект I1 управления. Настроечный стенд 12 имеет источник 13 управляющего сигнала, выход которого соединен с входом ротора 8. Выходы 9 и 10 соединены с входами сумматоров 14 и 15. За счет введения двух сумматоров, с коммутаторов i6 и 17 и источника мутирующего напряжения возникает (Л пульсация электромагнитного момента при сохранении средней составляющей, что уменьшает погрешность настройки, вызванную моментом сухого трения, 3 шт. to vj СП О) 00
фиг.г
| Столов Л.И | |||
| и др | |||
| Моментные двигатели с постоянными магнитами | |||
| - М | |||
| Энергия, 1977, с | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| Способ настройки моментного вентильного электродвигателя | 1981 |
|
SU1008857A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
