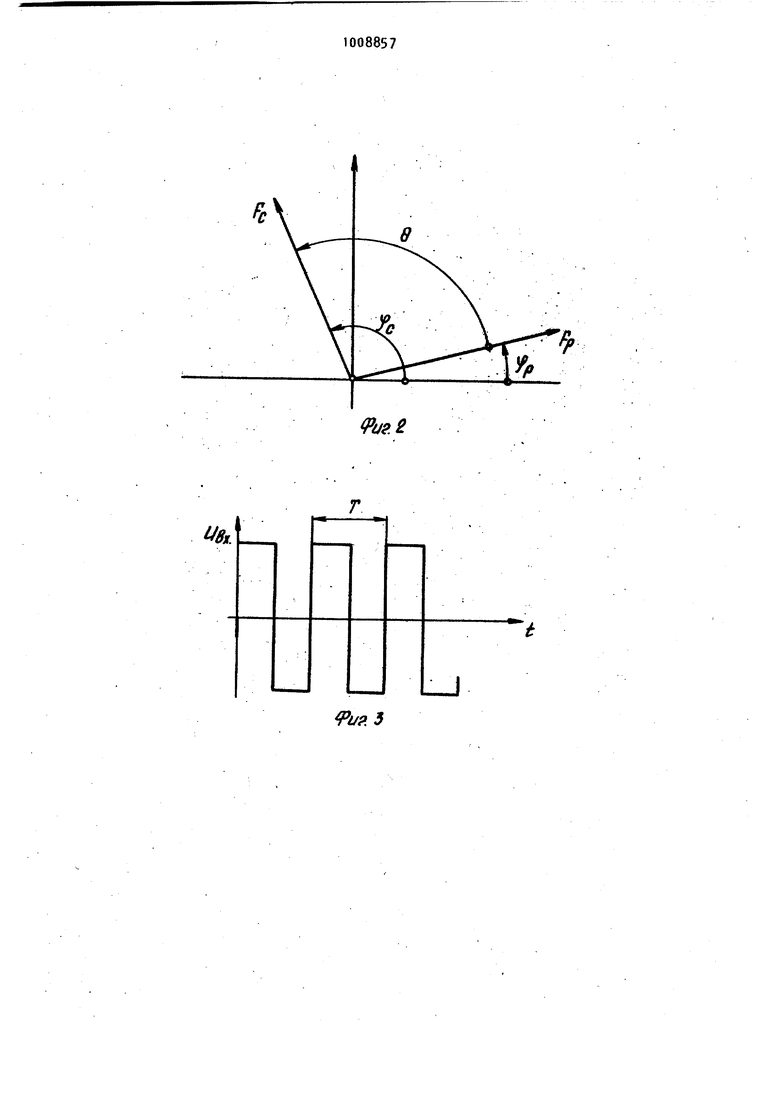
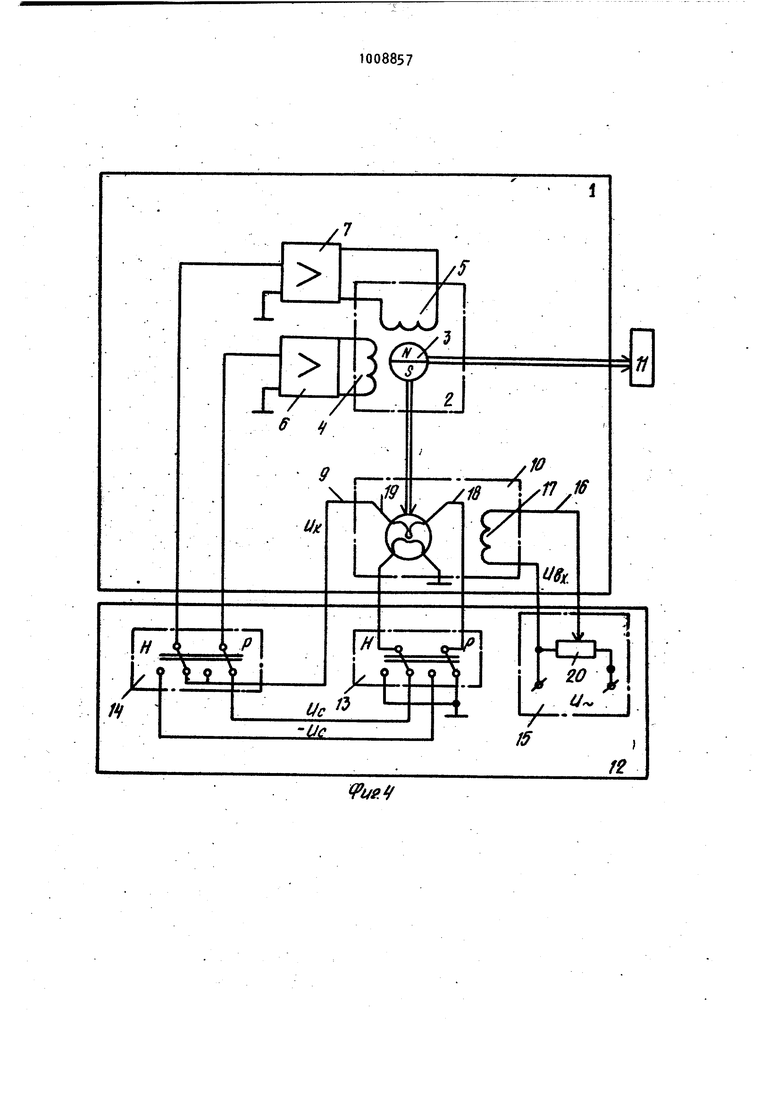
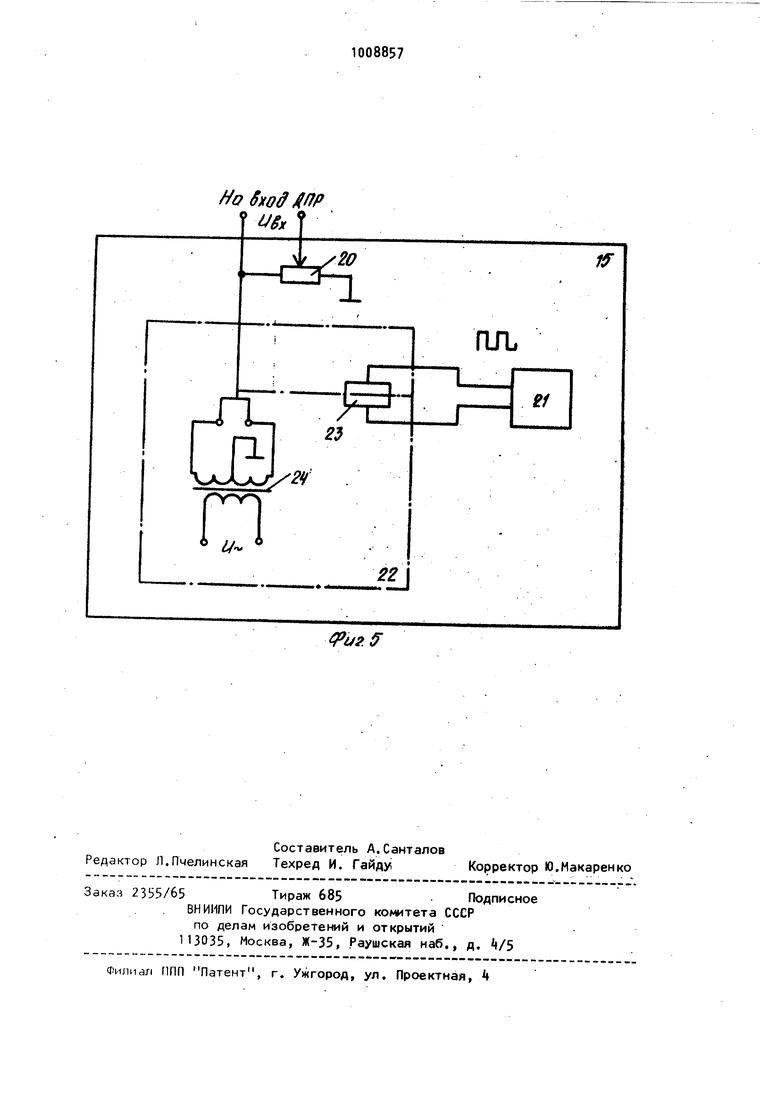
Изобретение относится к электри, ческим машинам, а именно к электрическим двигателям постоянного тока с бесконтактной коммутацией, осуществляемой с помощью полупроводниковых приборов, т.е. к вентильным эле тродвига,елям, и предназначено для настройки в процессе изготовления и эксплуатации электрических машин, работающих в качестве исполнительных моментных двигателей приводов следящих систем и систем стабилизации различного назначения. . Настройка моментного вентильного электродвигателя (МВД), содержа щего синхронную машину, усилители и датчик положения ротора (ДПР) заключается в получении в воздушном зазоре угла между магнитными потока ми или магнитодвижущими силами cja-iтора и ротора С угла коммутации), равного 90 эл. град., что аналогично получению угла сдвига щеток с гео метрической нейтрали обычного коллекторного двигателя постоянного тока. Известен способ настройки МВД, заключающийся в развороте статора ДПР работающего двигателя относитель но статора синхронной машины до достижения максимума вращающего момента настраиваемого двигателя, измеряемого специальным пружинным моментомером. Способ основан на том, что ма симум вращающего момента соответству ет углу коммутации в 90 эл. град 1 Недостатком данного способа является необходимость обязательного демонтажа моментного двигателя кз объ екта управления для установки его на каком-либо внешнем приборе-моментомере, что усложняет настройку и снижает ее точность, особенно, когда синхронный двигатель и ДПР поставляются в виде отдельных встраиваемых уЗЛОВг), 1 Наиболее близок к предлагаемому по технической сущности способ настройки МВД, содержащего ротор, статор с обмоткой якоря, синусно-косинусный датчик положения ротора, вы ходы которого подключены через усилители к соответствующим синусной и косинусной фазам обмотки якоря, включающий операции установки настраиваемого двигателя с объектом управления в стенд, подачи на двигатель питающего и управляющего напряжений, разворота статора датчика относительно статора двигателя и фиксации положения статора датчика, соответствующего максимуму вращающего момента 2 }. Недостатком известного способа является малая точность настройки двигателя. Вращающий момент МВД, как известно, определяется выражением /Ив КР Рр5т0 Мд„5тв. (1) д Мр„максимальный вращающий момент;магнитодвижущая сила МДС в воздушном зазоре, создаваемая ротором синхронного двигателя . МДС в воздушном зазоре, создаваемая обмотками стато ра синхронного двигателя-, угол коммутации; коэффициент пропорциональности, определяемый конструкцией и обмоточными данными синхронной машины.д При угле коммутации в 90 , как следует из (1), вращающий момент дви гателя достигает максимума Mg. Однако при углах коммутации, близких к 90, функция sin 0 меняется незначительно, т.е. максимум момента выражается неявно, что приводит к низкой угловой точности настройки МВД. Кроме того, недостатком известного способа является сложность настроечного стенда, содержащего дистанционную передачу, источник напряжения, предварительный усилитель с потенциометром на входе и нагрузочное устройство. Особенно большие трудности возникают при настройке МВД, встроенного в объект управления. Это усложняет конструкцию нагрузочного устройства и требует, как правило, применения дополнительных корректирующих устройств. Цель изобретения - повышение точности настройки двигателя при одновременном упрощении настроечного стенда. Поставленная цель достигается тем, что согласно способу настройки МВД, содержащего ротор, статор с обмоткой якоря, синусно-косинусный ДПР, выходы которого подключены через соответствующие усилители к синусной и коси нусной фазам обмотки якоря, включающий операции установки настраиваемого двигателя с объектом управления в 310 стенд, подачи на двигатель питающего и управляющего напряжений, разворота статора датчика относительно статора синхронного двигателя и фикса ции максимума вращающего момента, после подачи на двигатель напряжений инвертируют сигнал с синусного выхода датчика и подают его на вход усилителя косинусной фазы обмотки синхронного двигателя, а сигиал с косинусного выхода дат1«1ка подают на вход усилителя синусной фавы обмотки синхронной машины, при этом фиксацию статора датчика, соответствующую максимуму вращающего момента, осуществляют по угловому положению, соответствующему полной остановке двигателя . На фиг. 1 представлена функционал ная схема МВД и стенда, с помощью которого реализуется способ; на фиг. 2векторная диаграмма НДС в воздушном зазоре .синхронного двигателя на фиг. 3 - возможный вид управляющего сигнала на входе ДПР при изменении его знака; ца фиг. 4 - вариант стенда в случае применения синусно-косинусного вращающегося трансформатора (СКВТ) качестве AfP; .на фиг. 5 источник с переменной фазой напряжения. Настраиваемый МВД 1 содержит синх ронную машину 2, ротор 3 которой выполнен & виде постоянного магнита, а обмотка якоря с фазами f и 5 подключена через усилитель б и 7 к выходам 8 и 9 ДПР Wi С ротором 2 соединен объект П управления (и/|и его имитатор) . Настроечный стенд 12 (фиг. 1) состоит из инвертора 13, соединенного с синусным выходом 8 ДПР 10 переключателя 14 на два положения: правое - Р (работа), левое -: Н {настрой ка), и источника 15 управляющего сиг нала, соединенного с цепью 16 питани ДПР 10. В случае, если в качестве ДПР 10 СКВТ (фиг. 4), содержащий обмотку 17 возбуждения и синусную 18 и косинусную 19 обмотки, расположенные, напри мер, на роторе ДПР 10, инвертор 13 может быть выполнен в виде переключателя, коммутирующего в положении Н выводы синусной обмотки 18. При этом в качестве источника управляющего сигнала 15 может &)1ть использован потенциометр 20, подключенный к сети переменного тока с напряжением и. 7 Для изменения знака (фазы) управляющего напряжения источник управлякицего сигнала 15 выполняют в виде генератора прямоугольных колебаний (фиг. З). В этом случае при использовании в качестве ДПР 10 СКВТ (фиг.4) источник 15 управляющего сигнала может быть выполнен,например, в генератора. 21 стандартных прямоугольных колебаний, на выходе которого установлен модулятор 22, построенный, например, на поляризованном ре- . лё 23 и трансформаторе 24 со средней точкой, ф Способ настройки заключается в следующем. Настраиваемый МВД 1 с объектом управления 11 устанавливают в стенд 12 (фиг. 1), содержащий источник 15 управляющего сигнала и переключатель 14 на два положения: Р {работа) и Н (настройка). На двигатель подают напряжения путем подключения напряжения питания на усилители 6 и 7 и управляющего напряжения на входе ДПР 10 от источника 15 управляющего напряжения. Статс ДПР 10 разворачивают относительно статора синхронной машины 2 и фиксируют максимум вращающего момента 11ВД 1. После подачи на двигатель напряжений питания сигналы с выходов 8 и« 9 ДПР 10 преобразуют следующим образом. Сигнал инвертиру1от (т.е. изменяют его знак или фазу) с синусного 8 выхода ЛПР 10. Инвертированный сигнал подают на вход усилителя 7 косинусной обмотки 5 синхронного двигатзля 2 (путем переключения переключателя 14 в полол «ение Н а затем сигнал с косинусного выхода 9 ДПР ТО подают на вход усиштеля 6 (Синусной; обмотки 4 синхронного двигателя 2. Кроме того, фиксацию максимума вращающего момента МВД 1 осуществляют при отсутствии вращающего момента ротора 3 синхронной машины 2. Отсутствие вращающего момента в режиме настройки MakcHMyMy вращающе-. го момента двигателя в режиме нормальной работы обеспечиваются операцией преобразования сигналов с выходов ДПР 10. На векторной диаграмме (фиг. 2) углы Чр и векторов МДС р отора FJ, и статора F в воздушном зазоре синхронного двигателя отсчитываются от оси .абсцисс. При этом вектор НДС ct тора равен (( где и и lU - напряжения на синусной k и косинусной 5 обмот ках синхронного двигателя 2 соответственно Kj,- коэффициет пропорциональности между НДС статора синхронного д г.лтеля и напряжением, приложенным к его обм кам, При работе МВД 1 (переключатель Т на фиг. 1 в положении Р) и, к.,и где и и Uj - напряжение на синусно 8 и косинусном 9 выхо дах ДПР 10, Ку - коэффициент усиления усилителей 6 и 7. При этом в правильно настроенном МВД ротор ДПР 10 должен быть развер нут относительно ротора 3 синхронно то двигателя 2 на 90 эл. град.,;Т.е / А Р где Чд - угловое положение ротора ДПР 10. Напряжения на синусном 8 и косин ном 9 выходах ДПР 10 связаны с упра ляющим напряжением U входе 16 Д 10 зависимостью C () (где КА - коэффициент трансформации (передачи) ДПР 10. Тогда с учетом (з ) и С ) выражение 2 принимает вид ( р Эо°;фт(у90«), откуда угол НДС статора и.Гзin(/p490« % Ч7Г «СЦ ,COS() 2 - ч-р+зо,; а угол коммутации f e 4 -ifpz9o° При нартройке МВД 1 (переключатель I на фиг. 2 в положении Н) U -K/Vi U2-K,Uj,, тогда из (2)находят n.).jco.( 7. Откуда угол НДС статора cos(V90°) ,,, «irct«{ () .(II Так как ctg(fp+90°)-tgVp, то из (6) следует V,«rcict tcti/p -«fp: Следовательно, для правильно настроенного МВД в режиме настройки угол коммутации 9 ° и вращающий момент в соответствии с выражением (1 ) равен нулю. Таким образом, если в режиме настройки разворотом статора ДПР 10 добиваются отсутствия вращения двигателя, то для этого положения статора ДПР 10 в режиме работы (переключатель И возвращают в положе ние Р) вращающий момент .МВД 1 будет автоматически достигать максимального значения, так как угол ком-, мутации 0 станет равным 90 эл. град. Аналогичные результаты могут быть получены при замене операции инвертирования сигнала с синусного выхода 8 ДПР 10 эквивалентной операцией инвертирования сигнала с косинусного выхода 9 ДПР 10. Повышение точности настройки имеет место вследствие уменьшения методической ошибки настройки. Абсолютная ошибка измерения вращающего момента при постоянном напряжении, как следует из формулы (1 ), равна Согласно известному способу угол коммутации близок к 90, т.е. , где otg - угловая ошибка настройки. Следовательно, для известного способагде А - ошибка измерения величины соответствующей функции. Считая oto малой величиной и рас- , кладывая функцию coscL в ряд, получают oi откуда Cosod,--, 4fcosct й- и /JM --/и « вм 2 710 Согласно предлагаемому способу иэмерение вращающего момента в режиме настройки произвр.дится при угле коммутации, близком к нулю, т.е. , угловая ошибка настро ки в предлагаемом способе. Следовательно, ошибка измерения моиеИта при предлагаемом способе настройки с учетом малой величины равна ) Считая, что погрешность измерения вращающего момента в обоих способах одинакова, т.е. тЛМ|, получают из 8 и 9 Например, если принять погрешность измерения -момента равной 10% от максимального значения момента. развиваемого двигателем, т.е,,1, то угловая погрешность настро ки по предлагаемому способуotp 0 (10%), а по способу известному обо 2Й УОТ2 0, (45%). Исследованиями было установлено, что при постоянном знаке (фазе), упРЭвляющегонапряжения, на входе ДПР повышение точности настройки достига ется при малом моменте трения в опорах МВЛ и объекта управления. При большом кюменте трения целесообразно изменять знак (фазу) управляющего напряжения на входе ДПР с достаточно высокой частотой. Это объясняется тем, что ошибка настройки, как следует изДЮ), пропорциональна погрешности измерения момента ДМ, которая фактически определяется величиной момента сухого трения в опорах 1 и объекта 11 управления. При изменении знака (фазы) управ/|яющего напряжения (фиг. 3) вращающий момент МВД меняет свой знак, что вызывает вибрацию ротора 3 синхронного двигателя 2. Этогприводит К 1 1брационному уменьшению трения в опорах, а следовательно, и к умен шению ошибки настройки. Для достиже7.8 ния максимаяьногоэффекта, как показывают эксперименты, МВД должен работать в режиме датчика момента, что может быть достигнуто, если разгон двигателя происходит за время не болееодной постоянной времени МВД (с учетом объекта управлений) Тц. Таким образом, рекоментуемый период изменения управляющего сигнала Т 2Т, Проводилась сравнительная экспериментальная настройка МВД, содержащего шестнадцатиполюсный двухфазный синхронный двигатель типа ДМВ-2, с постоянныкм магнитами на роторе (пусковой момент 2,5 , напряжение питания 27 в), ДПР на базе бесконтактного СКВТ типа 2,5 БВТ и два транзисторных усилителя. МВД соединялся с имитатором объекта управления (.с оментом инерции 5,5 разпревышающим момент инерции ротора двигателя), содержащим порошковую муфту, включение которой вводило добавочный момент сухого трения в 1 Нм. При настройке по прототипу, нагрузочное устройство.в виде шкива с грузом создавало постоянный статический момент 0,56 . Для реализации предлагаемого способа применялся настроечный стенд, схема коTc Joro изображена на (|иг. k и 5. Точность настройки оценивалась длячетырех настроек по асимметрии скорости вращения МВД после настройки при его правом и левом вращениях. Результаты испытаний сведены в таблицу, Как видно из таблицы, предлагаемый способ настройки МВД снижает ошибку настройки в 2,9 раза при малом моменте сухого трения и в 3,5 3,8 раза при большом моменте сухогоi трения и при изменении управляющего сигнала. г Кроме того, значительно упрощается настроечное оборудование (например, стенд на фиг. содержит всего два переключателя и потенциометр), а сама настройка облегчается и ускоряется в результате отсутствия oneраций по настройке следящей системы, необходимой при известном способе.
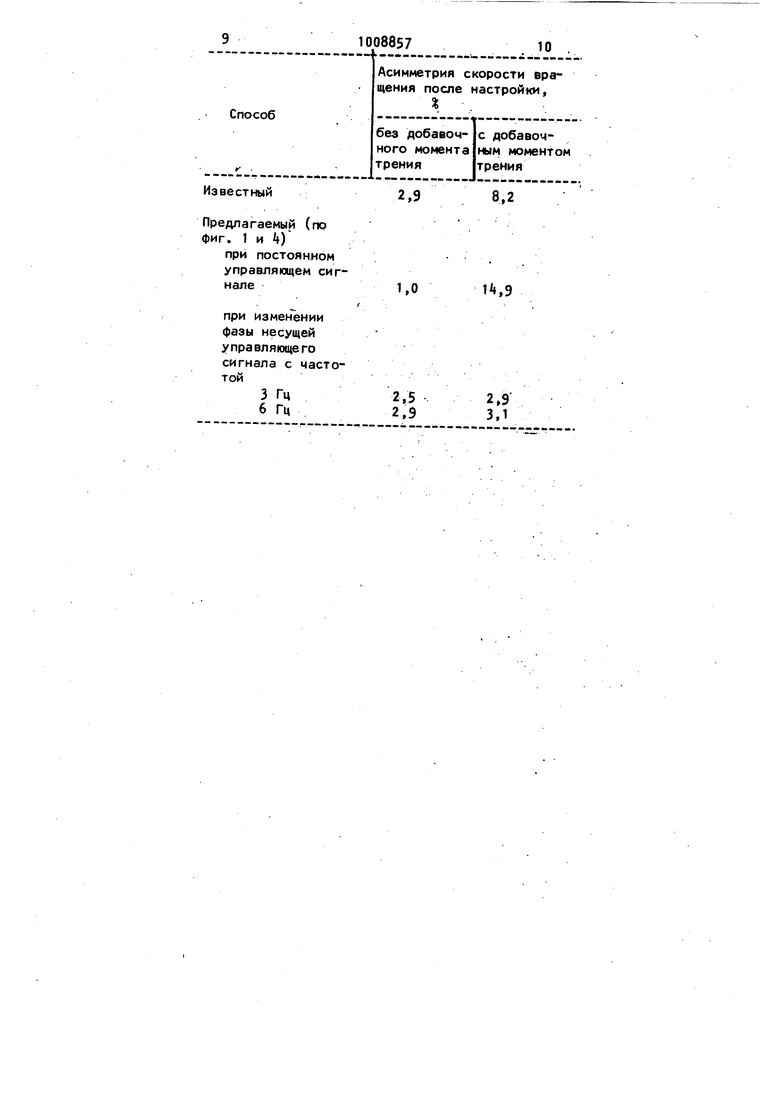
Известный
Предлагаемый (пр фиг. 1 и 4)
при постоянном управляющем сигнале
при изменении фазы несущей управляющего сигнала с частотой
3 Гц
6 Гц
8.2
I,9
2,9 3,1
tJ.2



| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки моментного вентильного электродвигателя | 1985 |
|
SU1288833A1 |
| Способ настройки вентильного электродвигателя | 1987 |
|
SU1436213A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1985 |
|
SU1275678A1 |
| Способ настройки моментного вентильного электродвигателя | 1985 |
|
SU1275677A1 |
| Способ настройки моментного вентильного электродвигателя | 1987 |
|
SU1495944A1 |
| Способ настройки вентильного электродвигателя | 1989 |
|
SU1742951A1 |
| Моментный вентильный электродвигатель | 1981 |
|
SU995218A1 |
| Способ настройки моментного вентильного электродвигателя | 1989 |
|
SU1690097A1 |
| Способ настройки вентильного электродвигателя | 1989 |
|
SU1774439A1 |
| СПОСОБ НАСТРОЙКИ ВЕНТИЛЬНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2556884C1 |

СПОСОБ НАСТРОЙКИ МОМЕНТНОГО ВЕНТИЛЬНОГО ЭЛЕКТРОДВИГАТЕЛЯ, сот держащего ротор, статор с обмоткой якоря и синусно-косинусный датчик положения ротора, выходы которого прдключены через соответствующие усилители к синусной и косинусной фазам обмотки якоря, включающий операции установки настраиваемого электродвигателя с объектом управления ;в стенд/ подачи на двигатель питающего и управляющего напряжений, разворота статора датчика относительно статора двигателя и фиксации углового положения статора датчика, соответствующего максимуму вращающего момента, отличаю щийс.я тем, что, с целью-повышения точности настройки при одновременном упрощении настроечного стенда, после подачи на двигатель напряжений инвертируют сигнал с синусного выхода датчика и подают его на вход у си ли- теля косинусной фазы электродвигателя, а сигнал с косинусного выхода I датчика подают на вГОд усилителя : синусной фазы обмотки электродвига- . V) теля, причем фиксацию углового положения статора датчика, соответствуюи;ую максимуму вращающего момента, осуществляют по угловому положению, § ; соответствующему полной остановке электродвигателя. , ,
и.3
,
f oSxod nP
Uf.ff
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Столов Л.И., Зыков Б.Н; Моментные двигатели с постоянными магнитами | |||
| М., Энергия, 1977, с | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке К 2877862/24-07, | |||
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
