Изобретение относится к области химической и теплоэнергетической техники и может бытзЬ применено например для регулирования температу- ры водонагревательных котлов.
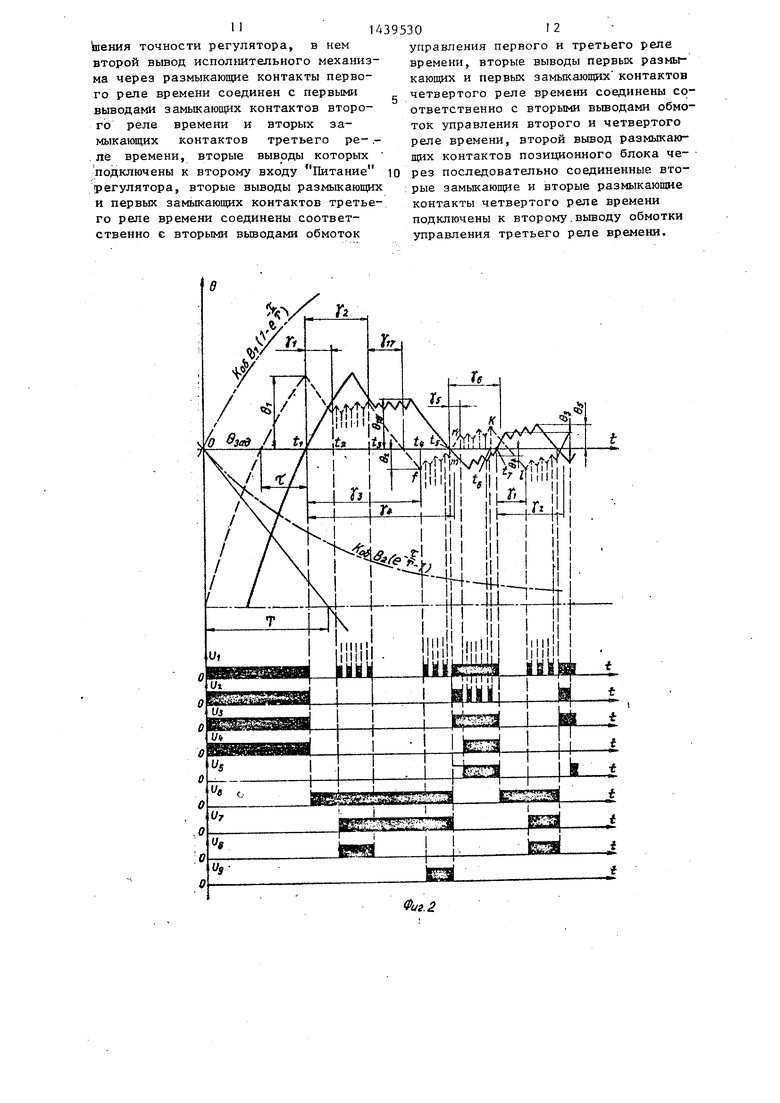
Целью изобретения является повы- шение точности регулятора. На фиг. 1 приведена принципиальная схема регулятора; на фиг, 2 и З- ; эП|Иры сигналов, i-шлюстрирующие рабо- i ту регулятора в установившемся режа- ме.
IРегулятор содержит задатчик 1,
I блок 2 сравнения, релейньш блок 3с несимметричной характеристикой, ре- ; лейный элемент 4, обмотку уиравле- i НИЛ промежуточного реле 5, замыкаю-- 1 щие 6 и размыкающие 7 контакты бло- I ка 3, обмотки управления первого 8, I второго 9, третьего 10 и четвертого I 11 репе времени, замыкашгцие контакты i 12 второго реле времени, размыкаю-- ; щие контакты 13 первого реле време- I ни., вторые 14, и первые 15 замыкающие контакты и размыкающие контакты 16 : третьего реле времеш, первые замы- i кагэщие 17, первые размьшающие 18,
вторые замыкающие 19 и вторые разшл- I кающие 20 контакты четвертого реле времени, исполнительный механизм 21; датчик 22, первый 23 и второй 24 входы питание регулятора I Обозначения, принятые на фиг, 1-3 напряжение питания; КТ1-эле- : менты, входящие в состав первого I 8 зремени; КТЗ элементы, входящие в ; состав второго реле 9 времени; КТ2-- 1 элементы, входящие в состав третьего
репе 10 времени| КТ4-элементы, вхо- I дяище в состав четвертого реле 11 времени; ,j |)% -.g,-времена задержек на срабатывание контактов 17-20, 15 и 16; и - сигнал задания; - , Jg - времена задержек на отпускание и на срабатьшание контакта 12; „ у, - времени задержек на отпускание контактов 17-20, 15 и 16; I lf У(6 -врем:ена зад.ержек на отпус- карше и на срабатывание контактов5 и - сигнал заданий; U - выходной сигнал датчика 22; Ug - сигнал рассогласования; Uj - напряжение на первом выводе контактов 14; U на- яряжение на исполнительном механизме i 21; U- - напр5та ение на втором выводе
контактов 6; U4 напряжение на : первом выводе контактов 15; Uj- напряжение на обмотке 8 управления
первого реле времени; U - напряже- ние на втором выводе контактов 7; U-f - напряжение на первом выводе контактов 17; Ug - .напряжение на об- мотке 9 управления второго реле времени; U - напряжение на втором выводе контактов 19; Т - постоянная времени объекта управления; К - коэффициент передачи объята управления; i - запаздывание в объекте; В и В - величины управляющего воздействия на объект при включенном и выключенном исполнительном механизме 21; Q величина локальных экстремальных значений параметра.
В качестве первого, второго, третьего и четвертого реле времени стандартные реле использованы быть не могут в связи с отсутствием стандар - та на конструктивное исполнение реле времени. В качестве третьего и четветого реле времени могут быть использованы общепромь шл:енные реле времени например реле времени БС-10, Кроме того, могут быть использованы реле времеьш ЭВ, ВЛ, и т.д.В качестве первого и- второго реле времени могут быть использованы, например, реле времени ВЛ 40-42.
Особенностью реле ВЛ 40-42 является то, что при подаче напряжения на реле происходит формирование в зависимости от модификации или паузы (задержка на включение, задержка на отпускание). Графики на фиг. 2 и 3 построены в предположении, что при подаче напряжения на реле происходит процесс, начинающийся с формирования импульса, т.е. мгновенное срабатывание контакта с последующим формированием первое вьщержки времени на отпускание для контакта 12 и контакта 13. При иной модицикации реле процессы проходят аналогично, но соответственно несколько корректируется методика расчета настроя контактов. В качестве исполнительного механизма 21 используется например электронагреватель.
Работа регулятора осуществляется следующим образом.
Предположим, что в исходньй момен времени, соответствующий началу рас-г смотрения работы регулятора, значени регулируемого параметра незначительно меньше заданного значения и до момента достижения параметром заданного значения проходит время боль- .. 1439530 ше, чем время настроек реле времени, В этом случае конечный этап переходного процесса в регуляторе имеет вид, представленный на фиг. 2 при условии, что запаздывание в системе включено между входом регулятора и выходом объекта, который может быть описан последовательным сое;щнением апериодического звена первого порядка и звена запаздывания, т.е. передаточПри превьппении сигналом U зада1 нб- го з 1ачения U происходит пропадание
10
ной функцией вида К
W
ОБ
ОБ
i+fs
-cS
е
где К коэффициент усиления объекта;
Т - постоянная времени объекта; Г - чистое запаздывание объекта; S - оператор Лапласа.
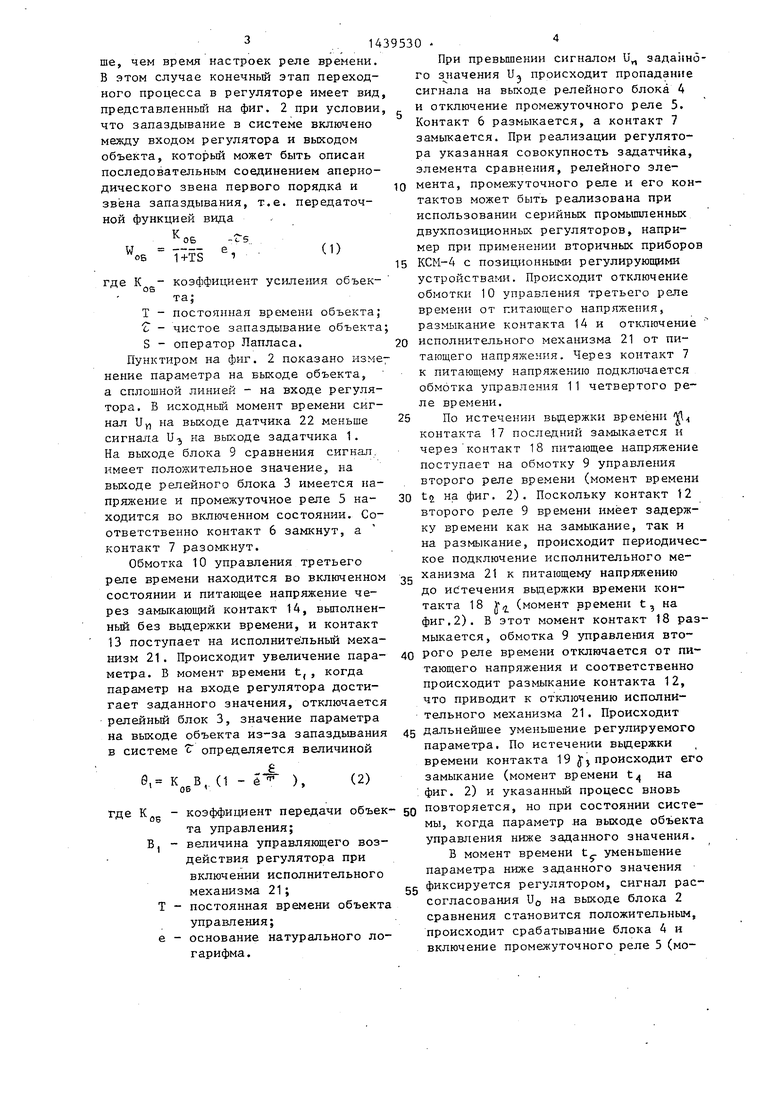
Пунктиром на фиг. 2 показано изменение параметра на выходе объекта, а сплошной линией - на входе регулятора. В исходньй момент времени сигнал Uy на выходе датчика 22 меньше сигнал.а U на выходе задатчика 1. На выходе блока 9 сравнения сигнал, имеет положительное значение, на выходе релейного блока 3 имеется напряжение и промежуточное реле 5 находится во включенном состоянии. Соответственно контакт 6 замкнут, а контакт 7 разомкнут.
Обмотка 10 управления третьего реле времени находится во включенном состоянии и питающее напряжение через замьжающий контакт 14, вьшолнен- ный без вьдержки времени, и контакт 13 поступает на исполнитёльньй механизм 21 . Происходит увеличение параметра. Б момент времени t,, когда параметр на входе регулятора достигает заданного значения, отключается релейный блок 3, значение параметра на выходе объекта из-за запаздьшания в системе определяется величиной
К В, ое
(1 ё
),
где К
OS
1
коэффициент передачи объекта управления; величина управляющего воздействия регулятора при включении исполнительного механизма 21;
Т - постоянная времени объекта управления;
е - основание натурального логарифма.
сигнала на выходе релейного блока 4 и отключение промежуточного реле 5. Контакт 6 размыкается, а контакт 7 замыкается. При реализации регулятора указанная совокупность задатчика, элемента сравнения, релейного элемента, промежуточного реле и его контактов может быть реализована при использовании серийных промьшшенных двухпозиционных регуляторов, напри- (1) мер при применении вторичных приборов
15 КСМ-4 с позиционными регулирующими устройствами. Происходит отключение обмотки 10 управления третьего реле времени от питающего напряжения, размыкание контакта 14 и отключение
20 исполнительного механизма 21 от питающего напряжения. Через контакт 7 к питающему напряжению подключается обмотка управления 11 четвертого реле времени.
25 По истечении вьщержки времени контакта 17 последний замыкается и через контакт 18 питающее напряжение поступает на обмотку 9 управления второго реле времени (момент времени
30 t на фиг. 2). Поскольку контакт 12 второго реле 9 времени имеет задержку времени как на замыкание, так и на размыкание, происходит периодическое подключение исполнительного ме2g ханизма 21 к питающему напряжению до истечения вьдержки времени контакта 18 (момент времени t на фиг,2). В этот момент контакт 18 размыкается, обмотка 9 управления вто40 рого реле времени отключается от питающего напряжения и соответственно происходит размыкание контакта 12, что приводит к отключению исполнительного механизма 21. Происходит
45 дальнейшее уменьшение регулируемого параметра. По истечении выдержки времени контакта 19 Jjпроисходит его (2) замыкание (момент времени t4 на фиг. 2) и указанный процесс вновь повторяется, но при состоянии системы, когда параметр .на выходе объекта управления ниже заданного значения.
В момент времени t уменьшение параметра ниже заданного значения
ее фиксируется регулятором, сигнал рассогласования DO на выходе блока 2 сравнения становится положительным, происходит срабатывание блока 4 и включение промежуточного реле 5 (мо50
0
При превьппении сигналом U зада1 нб- го з 1ачения U происходит пропадание
10
45
50
t,- на фиг. 2), Происхомент времени
днт замыкание контакта 6 и размыкание контакта 1, Дяя обеспечения ста- бильной работы схемы вьдержки времени у контакта 20 выбирается незначи- TiinbHo превьпиающей интервал времени
моментами времени t, и 1;
При
15
20
Э70М в случае изменения характера работы, например под влиянием внешне- ю го воздействия, отключение обмотки 9 управления второго реле времени осуществляется не за счет разньжания контакта 7 промежуточного реле 5, а при размыкании контакта 20, что сохраняет работоспособность регулятора. При срабатывании контактов 6 и 7 происходит подключение к питающему Нс.пряжению обмотки 10 управления третьего реле времени и исполнительного механизма 21 ,, поскольку происходит замыкание контакта 14, выполненного без выдерлски времеш-ь Происходит у.оеличение параметра, на выходе обтзекта, а на выходе регулятора, про- дслжается его уменьшение до величины б„ 5 опре, 3,еляющей максимальную величину отрицательного .отклонения в системе регулирования. При обычном дЁух- позициоином регулированки ве-пкчкнз. данного отклонения определяется как
-гг ,
25
35
Q, К. В,
ОБ
Т
(3)
где В„ - величина управл.яющего воз-действия на объект управления при отключенном электронагревателе 21а
По истечении вьщержки времени у у контакта 15 относительно момента t пер еключения регулятора происходит замыкание контакта 15 и к питающему напряжению подключается обмотка 8 управления первого ре:те времени, формирующего пульсируюиа 1й режим работы электронагревателя при положительном отклонении парьаметра от за.данного значения (момент времеаи t на фиг,2Х В момент времени t происходит вновь изменение полярности сигнала рассогласования Uj, и переключение промажу- точного реле 5 и его контактов 6 и 7. Обмотка 8 управления первого реле вр|2мени отключается от питающего на- дряжения, исполнительньй мехаш-1зм 21 полностью отключается от питающего напрялхбния и происходит снижение параметра на выходе объекта. Выдержка времени ): контакта 16 выбирается незначительно превышающей интервал
5
0
5
времени между моментами
Ч и
7
ЧТО
обеспечивает отключение обмотки 8 управления первого реле времени в случае изменения условий работы р егу- лятора. В дальнейшем указанный процесс повторяется и в системе устанавливается устойчивый автоколебатель- ньй процесс с существенно уменьшенными относительно обычного двухпозида- онного регулирования отклонениями pe-i гулируемого параметра от заданного значения.
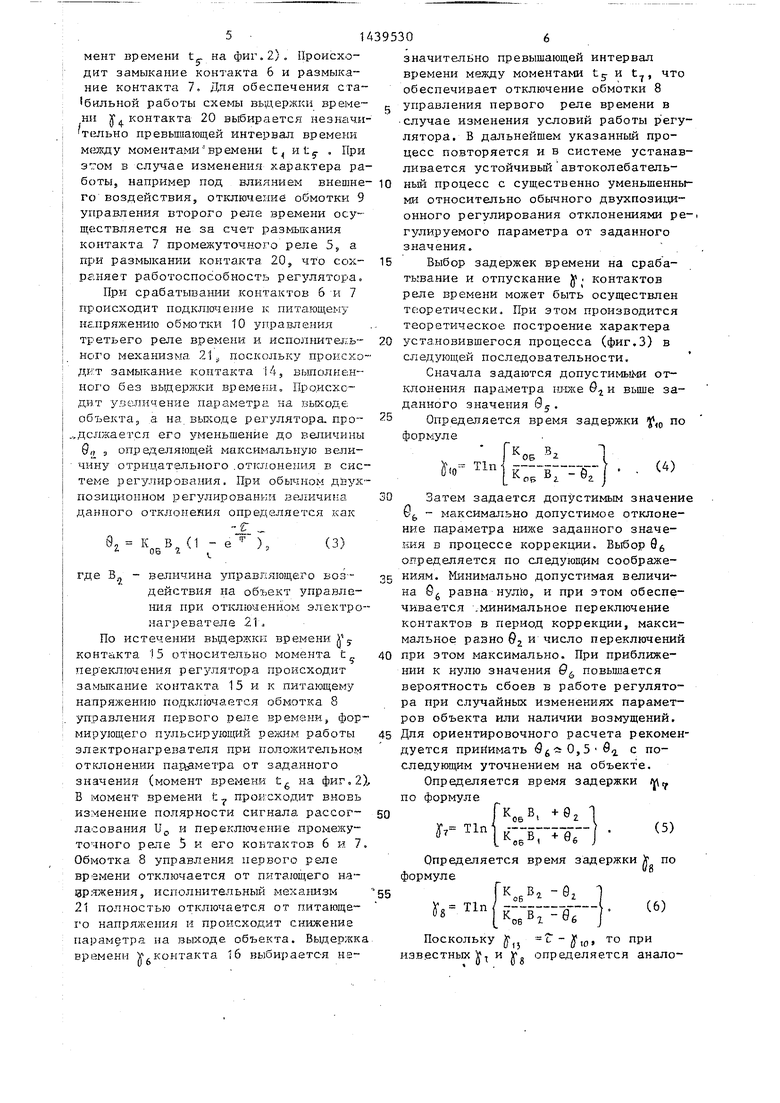
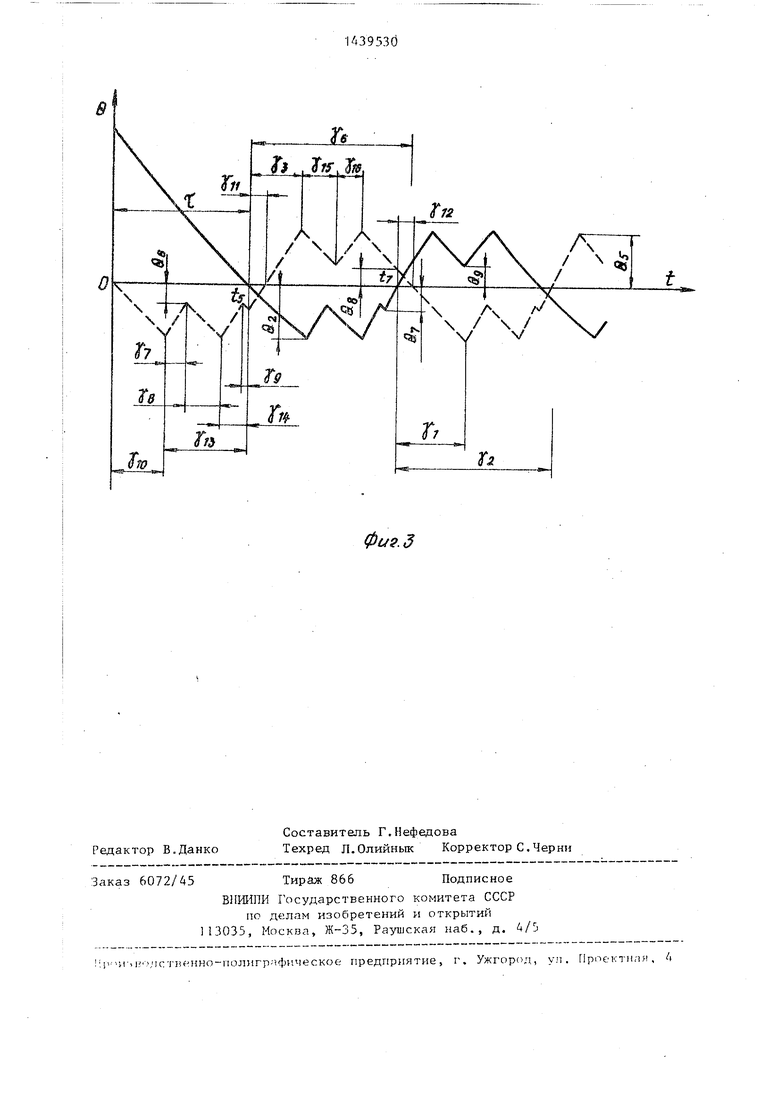
Выбор задержек времени на срабатывание и отпускание у . контактов реле времени может быть осуществлен теоретически. При этом производится теоретическое, построение характера установившегося процесса (фиг.З) в следующей последовательности.
Сначала задаются допусти1«1ьй 1и отклонения параметра ш-ске 0 и вьше заданного значения Qj .
Определяется время задержки ly, по формуле
0
5
0
КОБ S,
В, -е.
(4)
о
б.
}(( Tin . „
л., -.
Затем задается допустимым значение
максимально допустимое отклонение параметра ниже заданного значения в процессе коррекции. Выбор 9 определяется по спедуюн(им соображе- 5 ниям. Минимально допустимая величина S равна нулю, и при этом обеспечивается .минимальное переключение контактов в период коррекции, максимальное равно бг и число переключений при этом максимально. При приближении к нулю значения 0 повьплается вероятность сбоев в работе регулятора при случайных изменениях параметров объекта или наличии возмущений. Для ориентировочного расчета рекомендуется прийимать ,5 9i с последующим уточнением на объекте.
Определяется время задержки MI по формуле
ГКоеВ, ,
Т1п -
ОБ 1
,
(5)
5
Определяется время задержки к по
формуле
-9z 1
к в,,
05
8 кгв-;е
(6)
об- г
Поскольку J сГ-у,д, то при известных f., и V определяется анало/14
гично время задержки у, (длительность неполного цикла коррекции) и время задержки (длительность последней неполной выдержки второго реле времени).
Определяется последняя амплитуда
нижней полуволны формуле
-I 0т + 6 -КобВ Зе . (7)
С учетом полученных значений строится нижняя полуволна процесса на выходе объекта без учета запаздывания (пунктирный процесс на фиг. 3 до момента времени tj.) и соответственно нижняя полуволна процесса на входе релейного блока 3 регулятора переносом данного процесса вправо на время Т (сплошной процесс).
Задается допустимым значение 9 - максимально допустимое отклонение параметра выше заданного значения в установившемся режиме и значение ва аналогично значениям 0 и 9 для нижней полуволны.
Определяется время задержки по формуле
V Tin
V Qj - -
ОБ
Определяется время задержки У,по формуле
Г КобВ 1 1 . У.. Т1п ---.-5--.(9)
Аналогично определяются времена задержек y,,gno формулам
(10)
(11)
Определяется значение параметра 6g в юмент переключения регулятора
1. так же, как и амплитуды б для нижней полуволны. Для этого так же, как и для нижней полуволны, определется время неполнбго корректирующег воздействия V ,2 исходя из известност времен задержек J g У(б извености длительности нижнего полуперида, равного )f(o + Х ,г+ у/, .
° о
При известности величины Уо опре
.,,°
ляется время задержки Jiano формуле
КобВа+бб у,,, Tin {---V (12)
KoeBz
по формуле
+9с
(13)
ов -е,
с учетом полученных значений с тро- ится установившийся процесс в регуляторе.
Аналогично, при известности у, , Ifl Уб задавшись значением у , строится процесс регулирования на начальном участке с целью определения 8,0 (фиг. 2).
Значение устанавливается нес- колько большим значения ,Q +J,j , примерно равным длительности нижнего полупернода.
После определения время )f, по формуле
0
W
определяется
Jn Tin
(14)
затем время
25
30
50
пустимым значением
,
55 строится кривая К1.
Длительность задержки Jy принимается несколько большей значения длительности Ш1жнего полупериода и несколько меньшей значения верхнего полупериода .
Кроме того, выбор параметров настройки регулятора можно осуа ёствлять графически в следующей по следователь- ности. Осуществляется запись процесса .регулирования при обычном двухпозици- онном управлении, т.е. при отключении
35 обмоток 8 и 9 управления первого и второго реле времени от питания. Затем фиксируется точка на графике, соответствующая моменту времени t на фиг. 2. Задаваясь допустимыми зна40 чениями отклонений 0, строится кривая ran. По положению точки п определяется задержка времени , Предварительно определив запаздывание сГ в системе управления, находится положе45 ние точки на графике, соответствующее моменту времени t-j, смещением на величину запаздывания точки пересечения кривой тп с линией, характеризующей заданное значение параметра. Задавшись допустимой величиной б опре- деляется положение точки К, настройка первого реле времени и выдержка времени ly контакта 16. Задавшись допустимым значением отклонения б,
По положению точки 1 определяется выдержка времени У , а затем, при аналогичном построении дальнейшего.установившегося про9
цесса, вьщержка времени . Производится перестроение точки 1 в положение . По положению точки f определяются времена вьщержек J и Ус учетом того, что данные интер- вапы времени равны интервапам времени, определеннымJ,по соответствующим точкам записи графика при обычном ДВУХПОЗИЦИОННОМ регулировании
с цобавлением величины Полченные параметры проверяются на все диапазоне регулирования и при необходимости УТОЧНЯЮТСЯ,
незначительном изменении задающего воздействия при вьптолнении примерного равенства реак.ции объекта на одинаковые по длительности импульсы управления и паузы между импульсами, точность работы систем с применением предложенного регулятора теоретически и практически может быть обеспечена сколь угодно высокой, т,е. абсолютной. Одинаковая настройка первого и второго реле времени может быть осуществлена также и при управлении в системах без. самовыравнивания, когда
Процесс отработки управляющего или 15 инерционностью системы можно пренеб10
незначительном изменении задающего воздействия при вьптолнении примерного равенства реак.ции объекта на одинаковые по длительности импульсы управления и паузы между импульсами, - точность работы систем с применением предложенного регулятора теоретически и практически может быть обеспечена сколь угодно высокой, т,е. абсолютной. Одинаковая настройка первого и второго реле времени может быть осуществлена также и при управлении в системах без. самовыравнивания, когда
инерционностью системы можно пренеб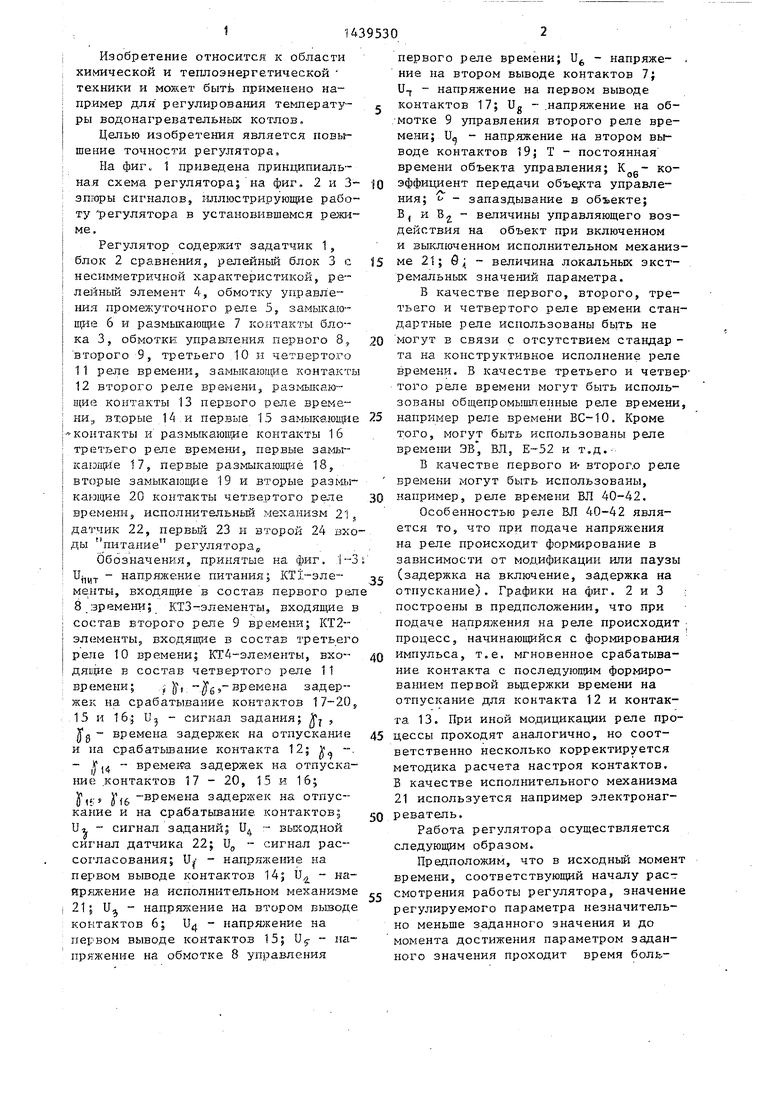
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный регулятор для систем с запаздыванием | 1985 |
|
SU1283709A1 |
| Позиционный регулятор | 1985 |
|
SU1303992A1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1416934A1 |
| Система регулирования температуры расплава в смесителе | 1987 |
|
SU1474616A1 |
| Регулятор | 1987 |
|
SU1425599A1 |
| Двухпозиционный регулятор для систем с запаздыванием | 1985 |
|
SU1335929A1 |
| Двухпозиционный регулятор для систем с запаздыванием | 1985 |
|
SU1283711A1 |
| Двухпозиционный регулятор для систем с запаздыванием | 1985 |
|
SU1290252A1 |
| Двухпозиционный регулятор для систем с запаздыванием | 1985 |
|
SU1335928A1 |
| Устройство для регулирования многопараметрического объекта | 1975 |
|
SU1080115A1 |
Изобретение относится к химической и теплоэнергетической технике и может быть применено, например, для регулирования температуры водонагре- вательных котлов. Цель изобретения 1IX ft-1, повьппение точности регулятора. Регулятор содержат задатчик 1, блок 2 сравнения, релейный блок 3 с несимметричной характеристикой, релейный элемент 4, обмотку управления промежуточного реле 5, и раз- мыкающрш контакты блока 3, обмотки реле времени 8-11, замыкакмцие контакты 12 второго реле времени, размыкающие контакты 13 первого реле времени, второй 14 и первый 15 замьшающие и размыкающие 16 третьего реле времени, первые замыкающие 17, первые размыкающие 18, вторые размыкающие 19 и вторые замыкающие 20 контакты четвертого реле времени, исполнительный механизм 21, датчик 22. 3 ил. i (Л с: КТ1 ктг ..Г} f) ff.nl f (-, л re XT) RT LUr-T .. 4 со х СП САЭ Pi/e. 1
возмущающего воздействия при исходном состоянии5 когда значение регулируемого параметра выше заданного значения., происходит аналогично, с
тем отличием, что при этом происходит 20 помощью исполнительного механизма поне.значительное увеличение длительности переходного процесса. Увеличение длительности переходного процесса при этом происходит вследствие того, что заданное состояние регулятора обеспечивается контактами 19 и 20 чевертого реле времени при переходе синала рассогласования с положительного на отрицательное значение. Поэтому при первом переходе значения па-- раметра ниже заданного значения происходит снижение параметра до величины рассогласования5 определяемой жением (2)5 срабатывание контактов 15 н 16,что приводит к растягиванию низ;:сней полуволны колебаний, а затем повторе ше процесса представленного на фиг,2,,
Поскольку при управлении объектами с самовьфавниванием при изменеш заданного зна.чения и при постоянстве параметров настройки реле времени происходит изменение вепичины прира- ще1шя регулируемого параметра за одно и то же число импульсов управле- НИН, настройкой параметров первого, и второго реле времени обеспечиваются режимы работы, позволяющие осуществить устойчивую работу системы регулирования во всем интервале работы. На фиг, 2 приведен процесс регулирования, близкий к предельному для устойчивой работы, когда переключение регулятора на отрицательном отклонении (момент времени tj) происходит при минимальном значении откло- нения.
В случае, если в системе регулирования управление происходит при
речь, например при регулировании температуры в установках, основанных иа смешении двух компонентов с различной температурой при управлении с
стоянной скорости,, в аналогичных системах при регулировании концентрации и состава и в других случаях.
Таким образом, предложенное изобр 25 тение позволяет обеспечить сколь
угодно высокую (т.е. абсолютную) точность регулирования.
Ф о р м у л а изобретения
30
Позиьщопиый регулятор для систем с запаздыванием,, содержащий датчик к задатчик, соединенные вьЕходамн с соответствующими входами блока срав35 нения, подключенного выходом к входу релейного блока с несимметричной характеристикой, обмотки управления первого, второго, третьего и четвертого реле времени, соединенные пер40 вьи-о- выводами с первым выводом исполнительного механизма и первым входом Питание регулятора, второй вывод обмотки управления третьего реле времени через замыкающие контакты ре45 лейного блока с несимметричной характеристикой соединен с вторым входом Питание регулятора, второй вход обмотки управления четвертого реле времени через размыкающий контакт релей50 ного блока с несимметричной характеристикой соединен с вторым входом Питание регулятора, размыкающие и первые замыкающие контакты третьего )реле времени соединены между собой
55 парвьп-4и выводами, первые размыкающие и первые замыкающие контакты четвертого реле времени .соединены между собой первыми вьшодами, о т л и ч а- ю ш. и и с я тем что, с целью повы11
Ьения точности регулятора, в нем второй вывод исполнительного механизма через размыкающие контакты первого реле времени соединен с первыми выводами замыкающих контактов второго реле времени и вторых замыкающих контактов третьего ре- ,- , лё времени, вторые выводы которых подключены к второму входу Питание |регулятора, вторые выводы размыкающих и первых замыкающих контактов третьего реле времени соединены соответственно с вторыми выводами обмоток
14
953012
управления первого и третьего реле времени, вторые выводы первых размыкающих и первых замыкающих контактов с четвертого реле времени соединены соответственно с вторыми вьтодами обмоток управления второго и четвертого реле времени, второй вывод размыкающих контактов позиционного блока че- 10 рез последовательно соединенные вто- : рые замыкающие и вторые размыкающие контакты четвертого реле времени подключены к второму.вьшоду обмотки управления третьего реле времени.
Фиг. 2
0U9.3
| Авторское свидетельство СССР № 1200238, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Позиционный регулятор для систем с запаздыванием | 1985 |
|
SU1283709A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
