Изобретение относится к технике автоматического регулирования и может быть применено в двухпозиционных системах автоматического регулирования инерционных объектов с запазды- ванием, например, при регулировании температуры с помощью электронагревателей .
Целью изобретения является упрощение конструкции регулятора.
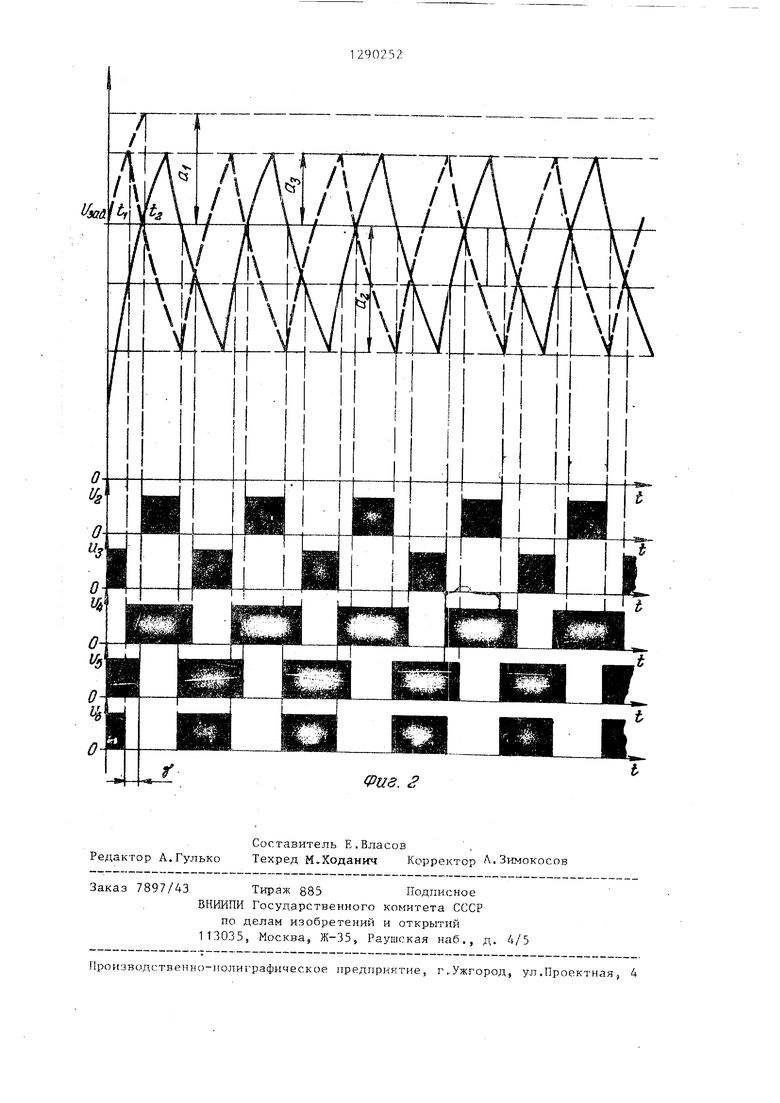
На фиг.1 изображена схема выполнения позиционного регулятора для систем с запаздьшанием; на фиг.2 - временные графики изменения сигналов в регуляторе в процессе регулирования.
Регулятор содержит задатчик регулируемого параметра 1, сумматор 2, обеспечивающий сравнение заданного значения параметра и его действительного значения, трехпозиционный релейный блок 3, выходные контакты которого 4 и,5 осуществляют управление объектом, и реле времени 6. В приведенном примере к контакту 5 подключена обмотка реле времени 6, контакты которого 7 и 8 включены параллельно между контактом 4 и электронагревателем 9. Трехпозиционный релейный блок 3 структурно может быть представлен состоящим из компараторов 10 и 11, входы которых подключены к входу блока, а выходы - к усилителям мощности 12 и 13, кото- рые представляют из себя электромагнитные промежуточные реле. Регулятор также содержит датчик регулируемого параметра 14.
Работа регулятора происходит еле- дующим образом.
На вход регулятора поступает сигнал VpOT flkT4HKa регулируемого параметра 14. Сигнал VP поступает на вхо сумматора 2, на второй вход которого поступает сигнал V от задатчика регулируемого параметра 1. Сигнал рассогласования V, равный разности между заданным и действительным значениями регулируемого параметра, с выхода сумматора 2 поступает на вход трехпозиционного релейного блока 3. Настройка блока 3 осуществля1ется таким образом, что выход блока, которы является контакт 4, меняет свое со- стояние в момент изменения знака синала рассогласования, а выход блока которым является контакт 5, меняет свое состояние, когда регулируемый
to
5
..
.- 25 JQ,
Q
д, пм
35
параметр стяновится меньше заданного значения на величину д. В случае, если в начальный момент отработки управляющего или возмущающего воздействия значение регулируемого параметра на много меньше, чем заданное значение (более, чем на величину &), сигнал V на выходе компаратора 10 равен О,, а на выходе компаратора 11 имеется сигнал положительной полярности V ,j. Контакт 4 находится в замкнутом состоянии, а контакт 5 в разомкнутом. Напряжение на катушке реле времени 6 равно О, его контакт 8 находится в замкнутом состоянии, а контакт 7 - в разомкнутом. При достижении регулируемым параметром значения Vjixd А происходит срабатывание компаратора 11 и замыкание контакта 5. На катушку реле времени 6 поступает напряжение V. Контакт 8 размыкается и электронагреватель отключается от питания на время выдержки у реле времени до момента замыкания контакта 7. При регулировании объектов с запаздыванием изменение параметра на входе регулятора происходит не сразу, а с задержкой, равной времени запаздывания. Если запаздьтание включено между выходом объекта регулирования и регулятором, то процесс регулирования соответствует фиг.2, где пунктиром на графике Vp f(t) изображен процесс изменения Vp на выходе объекта, а сплошной линией - процесс изменения сигнала V на входе регулятора. При достижении регулируемым параметром значения (момент времени с) происходит отключение электронагрева- теля и температура на выходе объекта начинает уменьшаться. Значение сигнала рассогласования на входе блока 3 продолжает увеличиваться и в момент времени t при его равенстве О происходит срабатьшание компаратора 10. Размыкается контакт 4, после чего замыкается контакт реле времени 7. Несмотря на замыкание контакта 7 электронагреватель продолжает быть в отключенном состоянии. В дальнейшем происходит повышение сигнала рассогласования до величины э-з J его снижение и т.д., т.е. установление устойчивого автоколебательного процесса. Таким образом, предварительное отключение элекронагревателя позволяет уменьшить амплитуду положительного отклонения с величины а до значения q , Длительность ji времени задержки реле времени и требуемую величину настройки а релейного блока 3 наиболее целесообразно определять графически. Для этого при отключенных корректирующих цепях (т.е. при обычном двухпоэиционном регулировании) необходимо осуществить запись процесса автоколебаний, определить за- паздьтание в системе, построить сме- щенный на величину запаздьтания график и определить параметры настройки, пользуясь известной методикой.
Анализ работы регулятора показывает, что при его применении амплитуда положительного отклонения может быть уменьшена на 10-50% в зависимости от динамических характеристик объекта управления. Применение регулятора целесообразно на объектах с достаточно медленными изменениями параметра в процессе автоколебаний, обеспечивающими условие включения корректирующего воздействия после начала снижения величины сигнала рассогласования до значения меньшего, чем максимальное в процессе автоколебаний. Это условие соблюдается в случае применения устройства для уменьшения положительной амплитуды
5
автоколебаний в объектах, где прк отсутствии коррекции положительная амплитуда автоколебаний меньше отрицательной.
Формула изобретения
Двухпозиционный регулятор, для систем с запаздьгоанием, содержагцнй
0 последовательно включенные задатчик регулируемого параметра, сумматор, к второму входу которого подключен датчик регулируемого параметра, и трехпозиционный релейный блок, первые выводы первого и второго размыкающих контактов которого подсоединены к первой клемме питания, к второй клемме питания.подключен выход электронагревателя, отличаю0 щ и и с я тем, что, с целью упрощения конструкции регулятора, он содержит реле времени, обмотка которого подключена между вторым выводом второго размыкающего контакта трехпозицион- ного релейного блока и выходом электронагревателя, вход которого соединен через параллельно включенные размыкающий и замыкающий контакты реле времени со вторым выводом первого
- размыкающего контакта трехпозицион- ного релейного блока.
1
Фив. S
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухпозиционный регулятор для систем с запаздыванием | 1985 |
|
SU1335928A1 |
| Двухпозиционный регулятор для систем с запаздыванием | 1985 |
|
SU1335929A1 |
| Двухпозиционный регулятор для систем с запаздыванием | 1985 |
|
SU1283711A1 |
| Позиционный регулятор для систем с запаздыванием | 1985 |
|
SU1283709A1 |
| Трехпозиционный регулятор | 1984 |
|
SU1259208A1 |
| Позиционный регулятор для систем с запаздыванием | 1987 |
|
SU1427328A1 |
| Устройство для регулирования процесса нагрева | 1986 |
|
SU1352469A1 |
| Позиционный регулятор | 1985 |
|
SU1303992A1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1439530A1 |
| Система экстремального регулирования | 1981 |
|
SU1056132A1 |
Изобретение относится к автоматическому регулированию и может быть использовано для автоматического регулирования инерционных объектов с запаздыванием. Цель изобретения - упрощение конструкции двухпозицион- ного регулятора для систем с запаздыванием, которая достигается подключением к выходу трехпозиционного релейного блока 3 дополнительного реле времени 6, размыкающим и замыкающим контактами 7, 8 которого обес печивается предварительное выключение электронагревателя 2, чем обеспечивается уменьшение амплитуды отклонения параметра выше заданного значения. 2 ил. Ф (Л с . п гз В 4/ / Uf КЗ/ lit h/V ГС ;о о ND СП IND
Составитель Е.Воаасов Редактор А.Гулько Техред Н Ходанич Корректор Л.Зимокосов
Заказ 7897/43 Тираж 885 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113Q35, MocKBaj Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г„Ужгород, ул.Проектная, 4
| Клюев А.С | |||
| Двухпозиционные автоматические регуляторы и их настройка | |||
| Ml: Энергия, 1967, с..76, рис.3-8, с.82-83, рис.3-13, 3-14. |
