Изобретение относится к -технике автоматического регулирования и может быть применено в двух- и трехпо- зициоиных системах автоматического регулирования объектов с запаздывани- ем исполнительных механизмов с постоянной скоростью перемещения.
Цель изобр.етения - повышение точности регулирования позицирниого регулятора при работе в двухпозицион- ном режиме.
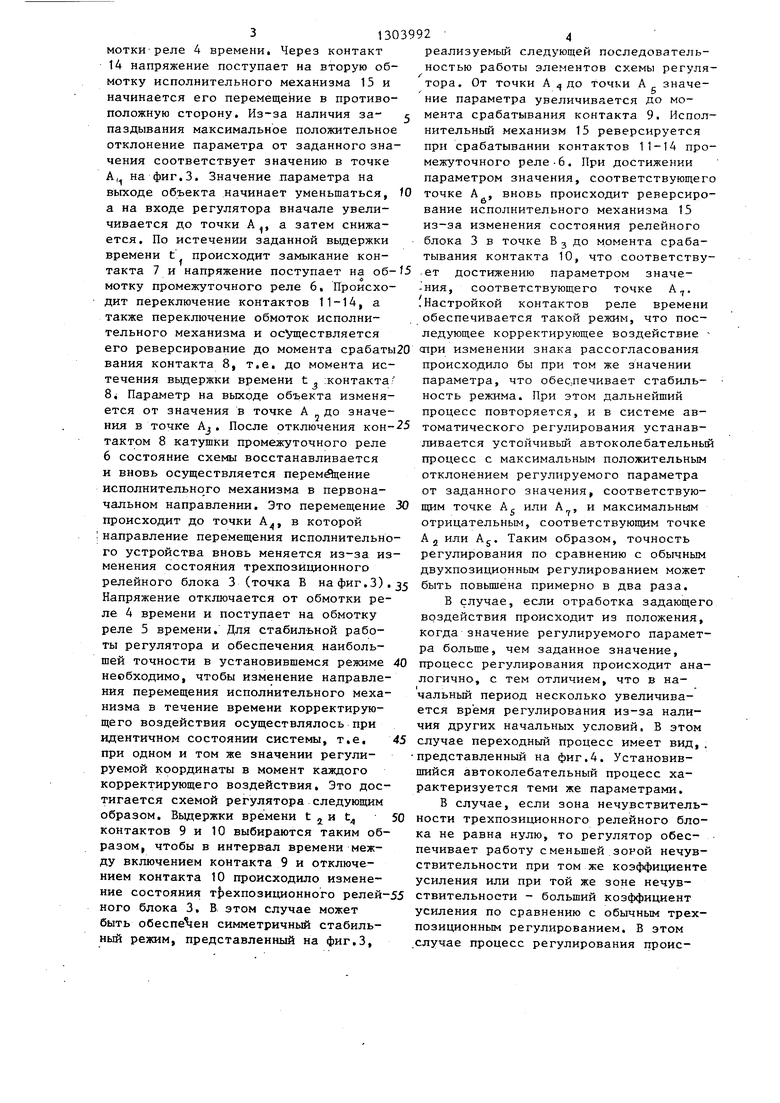
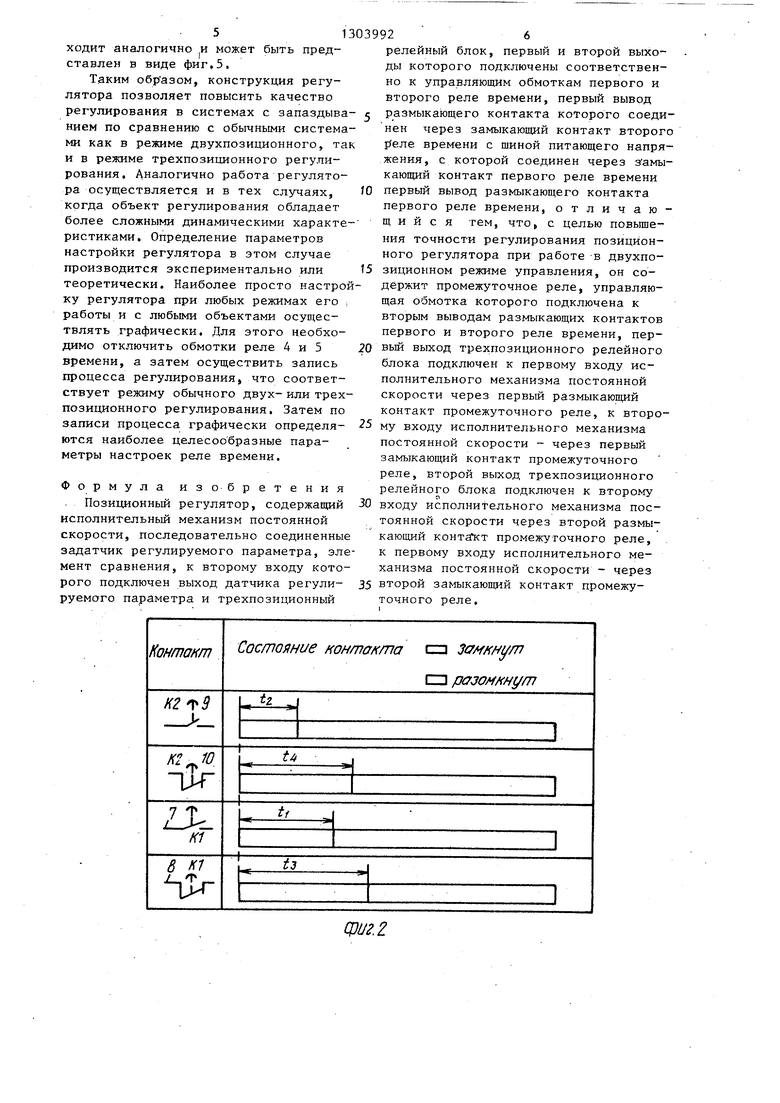
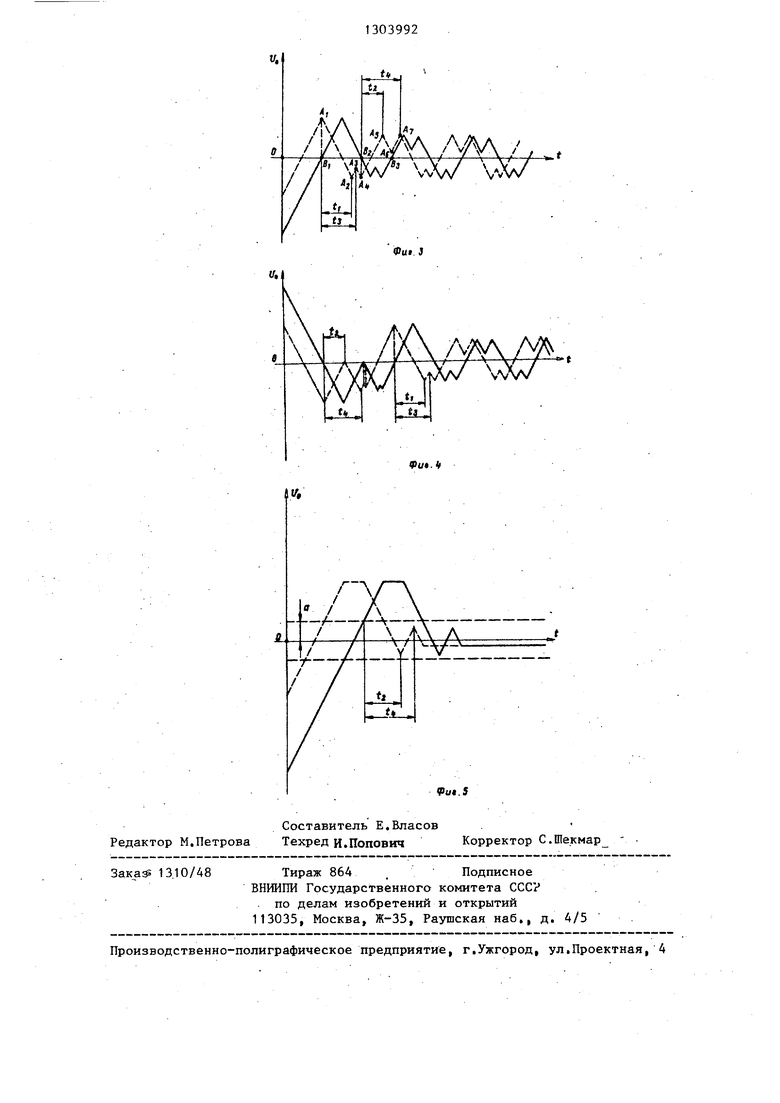
На фиг.1 представлена принципиаль- ная схема позиционного регулятораJ на фиг.2 - диаграмма замыканий кон- тактов реле времени при работе регу- лятора; на фиг.З и 4 - примеры переходных процессов в системе автоматического регулирования с использованием регулятора при его работе в двух- позиционном режиме; на фиг.З - то же, с использованием регулятора при его работе в трехпозиционном режиме.
Регулятор содержит задатчик 1 ре- тулируемого параметра, элемент 2 сравнения, трехпозиционный релейный блок 3, первое и второе реле 4 и 5 времени, промежуточное реле 6, контакты 7 и 8 первого реле времени, контакты 9 и 10 второго реле времени, контакты 11-14 промежуточного реле, исполнительный механизм 15 постоянной скорости, датчик 16 регулируемого параметра.
Регулятор работает следующим образом.
I,
На вход- регулятора поступает сигнал Up от датчика 16 регулируемого параметра. Этот сигнал поступает на первый вход элемента 2 сравнения, на второй вход которого поступает сигнал от задатчика 1 регулируемого параметра. Сигнал рассогласования Up, равный разности между заданным U и текущим Up значениями регулируемого парамет- ра, поступает на вход трехпозиционно- го релейного блока 3. В случае, если трехпозиционный релейный блок настроен таким образом, что зона его нечувствительности равна- О, то в зависимости от знака сигнала рассогласования на одном из его выходов всегда присутствует управляющий сигнал U или Uj. При наличии зоны нечувстви
.тельности, если сигнал рассогласования не превышает ее значения, управляющие сигналы на выходе, блока 3 отсутствуют. Дальнейшая работа регулятора рассмотрена на простейшем при5
O
5, 0
5
Q /
0
5
мере, когда зона нечувствительности релейного блока 3 равна нулю, а объект управления можно характеризовать безынерционным усилительным звеном. .Такой пример соответствует системам регулирования температуры на основе смешения двух теплоносителей с различной температурой, различным системам 15егулирования расхода и т.д. Предположим, что-JB начальный момент отработки управляющего или возмущаю-, щего воздействия значение регулируемого параметра значительно ниже заданного значения. В этом случае на первом выходе блока 3, подключенном к реле 5 времени, имеется напряжение. Будем также считать, что к рассматриваемому моменту времени с момента появления сигнала на данном выходе блока 3 прошло время, большее чем время настройки контакта 8, причем время настройки контакта 7 меньше, чем контакта 8. В этом с5 1учае исполнитель- ньй механизм совершает движение в сторону уменьшения сигнала рассогласования до момента переключения релейного блока 3. Если указанное условие не выполняется, то время переходного процесса увеличивается за счет излишнего корректирующего воздействия, но характер установившегося режима не меняется. Для работоспособности регулятора условие (чтобы время настройки размыкающих контактов 8 и 10 пре- вьш1ало время настройки замыкающих контактов 7 и 9) является обязательным. Возможная диаграмма замыканий контактов реле 4 и 5 времени может в этом.случае соответствовать фиг.2, В описываемом режиме- дальнейший процесс регулирования соотв-етствует фиг.З. При перемещении исполнительного механизма значение параметра увеличивается, но при наличии в- системе запаздывания информация об зтом на вход регулятора поступает с задержкой, равной времени запаздывания. На фиг.З пунктирной линией изображен процесс изменения параметра на выходе объекта, сплошной - на входе регулятора в предположении, что запаздывание включено между выходом объекта и- входом регу-- лятора. В момент времени, когда значение сигнала Up становится равным значению сигнала Uj (точка В на фиг.З), происходит изменение состояния трех- позиционного релейного блока 3. Обмотка реле 5 времени отключается от напряжения и происходит подключение обмотки реле 4 времени. Через контакт 14 напряжение поступает на вторую обмотку исполнительного механизма 15 и начинается его перемещение в противоположную сторону. Из-за наличия за- паздывания максимальное положительное отклонение параметра от заданного значения соответствует значению в точке Ац на фиг,3. Значение параметра на выходе объекта начинает уменьшаться, а на входе регулятора вначале увеличивается до точки Ар а затем снижается. По истечении заданной выдержки времени t происходит замыкание контакта 7 и напряжение поступает на обмотку промежуточного реле 6, Происходит переключение контактов 11-14, а также переключение обмоток исполнительного механизма и осуществляется его реверсирование до момента срабаты вания контакта 8, т.а, до момента истечения вьщержки времени t :контакта 8i Параметр на выходе объекта изменяется от значения в точке А до значения в точке AJ . После отключения контактом 8 катушки промежуточного реле 6 состояние схемы восстанавливается и вновь осуществляется перемйдение исполнительного механизма в первоначальном направлении. Это перемещение происходит до точки А, в которой направление перемещения исполнительного устройства вновь меняется из-за изменения состояния трехпозиционного релейного блока 3 (точка В на фиг.3), Напряжение отключается от обмотки реле 4 времени и поступает на обмотку реле 5 времени. Для стабильной работы регулятора и обеспечения наибольшей точности в установившемся режиме необходимо, чтобы изменение направления перемещения исполнительного механизма в течение времени корректирующего воздействия осуществлялось при идентичном состоянии системы, т.е, при одном и том же значении регулируемой координаты в момент каждого корректирующего воздействия. Это достигается схемой регулятора следующим образом. Вьщержки времени t и t контактов 9 и 10 выбираются таким образом, чтобы в интервал времени между включением контакта 9 и отключением контакта 10 происходило изменение состояния тЬехпозиционного релейного блока 3. В этом случае может быть обеспечен симметричный стабильный режим, представленный на фиг.З,
реализуемый следующей последовательностью работы элементов схемы регулятора. От точки А до Точки А значение параметра увеличивается до момента срабатывания контакта 9. Исполнительный механизм 15 реверсируется при срабатывании контактов 11-14 промежуточного реле-6. При достижении параметром значения, соответствующего точке А , вновь происходит реверсирование исполнительного механизма 15 из-за изменения состояния релейного блока 3 в точке В до момента срабатывания контакта 10, что соответствует достижению параметром значе-ния, соответствующего точке А,.
Настройкой контактов реле времени обеспечивается такой режим, что последующее корректирующее воздействие отри изменении знака рассогласования происходило бы при том же значении параметра, что обеспечивает стабильность режима. При этом дальнейший процесс повторяется, и в системе автоматического регулирования устанавливается устойчивый автоколебательный процесс с максимальным положительным отклонением регулируемого параметра от заданного значения, соответствую- точке А, или А , и максимальным
JI
отрицательным, соответствующим точке АЗ или Ag. Таким образом, точность регулирования по сравнению с обычным двухпозиционным регулированием может быть повьш1ена примерно в два раза.
В случае, если отработка задающего воздействия происходит из положения, когда значение регулируемого параметра больше, чем заданное значение, процесс регулирования происходит аналогично, с тем отличием, что в начальный период несколько увеличивается время регулирования из-за наличия других начальных условий, В этом случае переходный процесс имеет вид,. -представленный на фиг.4. Установившийся автоколебательный процесс характеризуется теми же параметрами.
В случае, если зона нечувствительности трехпозиционного релейного блока не равна нулю, то регулятор обеспечивает работу с меньшей зоной нечувствительности при том же коэффициенте усиления или при той же зоне нечувствительности - больший коэффициент усиления по сравнению с обычным трех- позиционным регулированием. В этом случае процесс регулирования проис
ходит аналогично и может быть представлен в виде фиг,5,
Таким обр аэом, конструкция регулятора позволяет повысить качество регулирования в системах с запаздыванием по сравнению с обычньми системами как в режиме двухпозиционного, так и в режиме трехпозиционного регулирования. Аналогично работа регулятора осуществляется и в тех случаях, когда объект регулирования обладает более сложными динамическими характеристиками. Определение параметров настройки регулятора в этом случае производится экспериментально или теоретически. Наиболее просто настройку регулятора при любых режимах его , работы и с любыми объектами ocyniec- твлять графически. Для этого необходимо отключить обмотки реле 4 и 5 времени, а затем осуществить запись процесса регулирования, что соответствует режиму обычного двух- или трехпозиционного регулирования. Затем по записи процесса графически определяются наиболее целесообразные параметры настроек реле времени.
Формула изобретения Позиционный регулятор, содержащий исполнительный механизм постоянной скорости, последовательно соединенные задатчик регулируемого параметра, элерелейный блок, первый и второй вых ды которого подключены соответстве но к управляющим обмоткам первого второго реле времени, первый вывод размыкающего контакта которого сое нен через замыкающий контакт втор Г(еле времени с шиной питающего нап жения, с которой соединен через з а кающий контакт первого реле времен первый вывод размыкающего контакта первого реле времени, отлича щийся тем, что, с целью повыш ния точности регулирования позицио ного регулятора при работе в двухп зиционном режиме управления, он со держит промежуточное реле, управля щая обмотка которого подключена к вторым выводам размыкающих контакт первого и второго реле времени, пе вьш выход трехпозиционного релейно блока подключен к первому входу ис полнительного механизма постоянной скорости через первый размыкающий контакт промежуточного реле, к вто му входу исполнительного механизма постоянной скорости - через первый замыкающий контакт промежуточного реле, второй выход трехпозиционног релейного блока подключен к втором 30 входу исполнительного механизма по тоянной скорости через второй разм кающий конта кт промежуточного реле к первому входу исполнительного ме ханизма постоянной скорости - чере
мент сравнения, к второму входу которого подключен выход датчика регули- 35 второй замыкающий контакт промежу- руемаго параметра и трехпозиционный точного реле.
O
5
0
релейный блок, первый и второй выходы которого подключены соответственно к управляющим обмоткам первого и второго реле времени, первый вывод размыкающего контакта которого соединен через замыкающий контакт второго Г(еле времени с шиной питающего напряжения, с которой соединен через з амы- кающий контакт первого реле времени первый вывод размыкающего контакта первого реле времени, отличающийся тем, что, с целью повышения точности регулирования позиционного регулятора при работе в двухпо- зиционном режиме управления, он содержит промежуточное реле, управляющая обмотка которого подключена к вторым выводам размыкающих контактов первого и второго реле времени, пер- вьш выход трехпозиционного релейного блока подключен к первому входу исполнительного механизма постоянной скорости через первый размыкающий контакт промежуточного реле, к второму входу исполнительного механизма постоянной скорости - через первый замыкающий контакт промежуточного реле, второй выход трехпозиционного релейного блока подключен к второму 0 входу исполнительного механизма постоянной скорости через второй размыкающий конта кт промежуточного реле, к первому входу исполнительного механизма постоянной скорости - через
5
5 второй замыкающий контакт промежу- точного реле.
ф1/.
/1
V
7
A/V
-y-/- -v-/
AW
VN/ N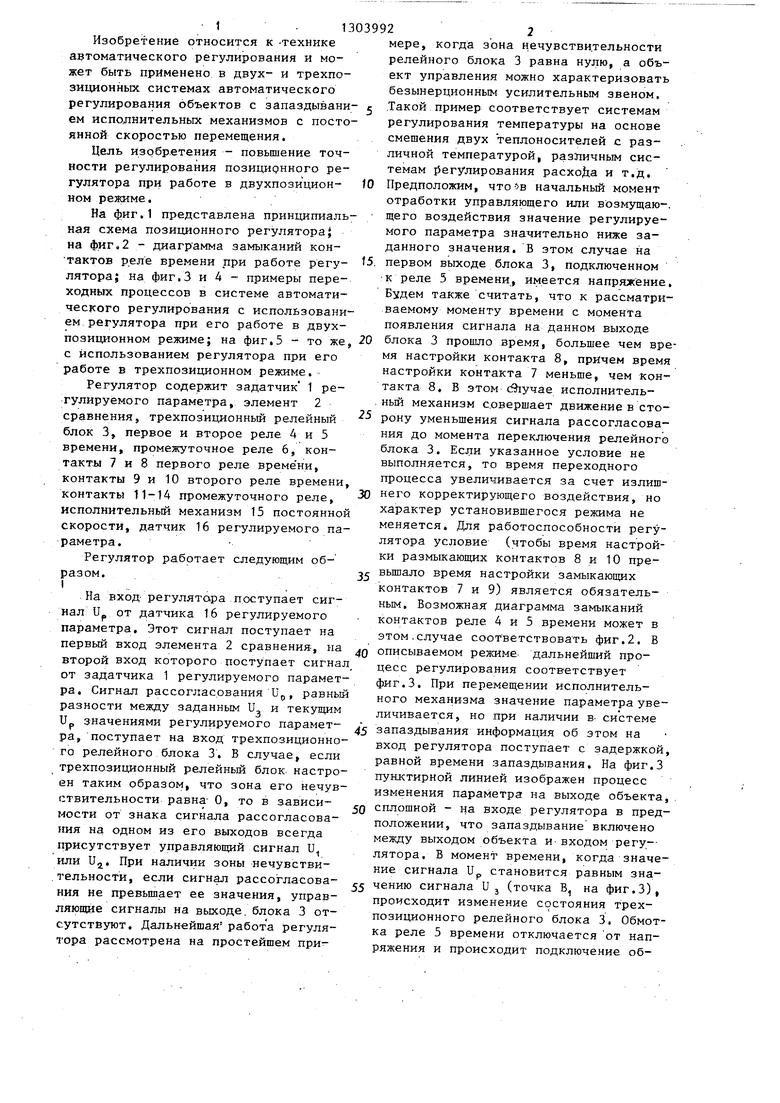
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный регулятор для систем с запаздыванием | 1985 |
|
SU1283709A1 |
| Двухпозиционный регулятор для систем с запаздыванием | 1985 |
|
SU1335928A1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1439530A1 |
| Двухпозиционный регулятор для систем с запаздыванием | 1985 |
|
SU1290252A1 |
| Двухпозиционный регулятор для систем с запаздыванием | 1985 |
|
SU1283711A1 |
| Регулятор | 1987 |
|
SU1425599A1 |
| Двухпозиционный регулятор для систем с запаздыванием | 1985 |
|
SU1335929A1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1416934A1 |
| РЕЛЕЙНОЕ АВТОМАТИЧЕСКОЕ УСТРОЙСТВО | 1969 |
|
SU255411A1 |
| Устройство для регулирования температуры расплава в смесителях | 1987 |
|
SU1474614A1 |
Изобретение относится к автоматическим регуляторам и может быть применено в двух- и трехпозиционных системах автоматического регулирования объектами с запаздыванием с использованием исполнительных механизмов постоянной скорости. Цель изобретения - повышение точности регулирования позиционного регулятора при работе в двухпозиционном режиме, которая достигается введением дополнительного промежуточного реле. Регулятор содержит задатчик 1, элемент сравнения 2, датчик параметра 16, трехпозиционный релейный регулирующий блок 3, два реле времени 4 и 5, промежуточное реле 6, подключенное к питающему напряжению контактами 7-10 реле времени, В процессе работы регулятора в установившемся автоколебательном режиме с помощью контактов 11-14 промежуточного реле 6 осуществляется периодическое реверсирование исполнительного механизма постоянной скорости 15, Моменты реверсирования и их длительность определяется настройкой контактов реле времени. Указанное реверсирование обеспечивает уменьшение амплитуды установившегося автоколебательного режима при зоне нечувствительности блока 3, равной нулю, и при ее ненулевом значении, 5 ил. i СЛ 00 О оо со CD to
. 4
Vut.S
Составитель Е.Власов Редактор М.Петрова Техред и.Попович Корректор С.Шекмар
Зака 13.10/48 Тираж 864 , Подписное ВНИИПИ Государственного комитета ССС
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Клюев А.С | |||
| Двухпозиционные автоматические регуляторы и их настройка | |||
| М.: Энергия, 1967, с | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Авторское свидетельство СССР № 1200238, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
