Tt t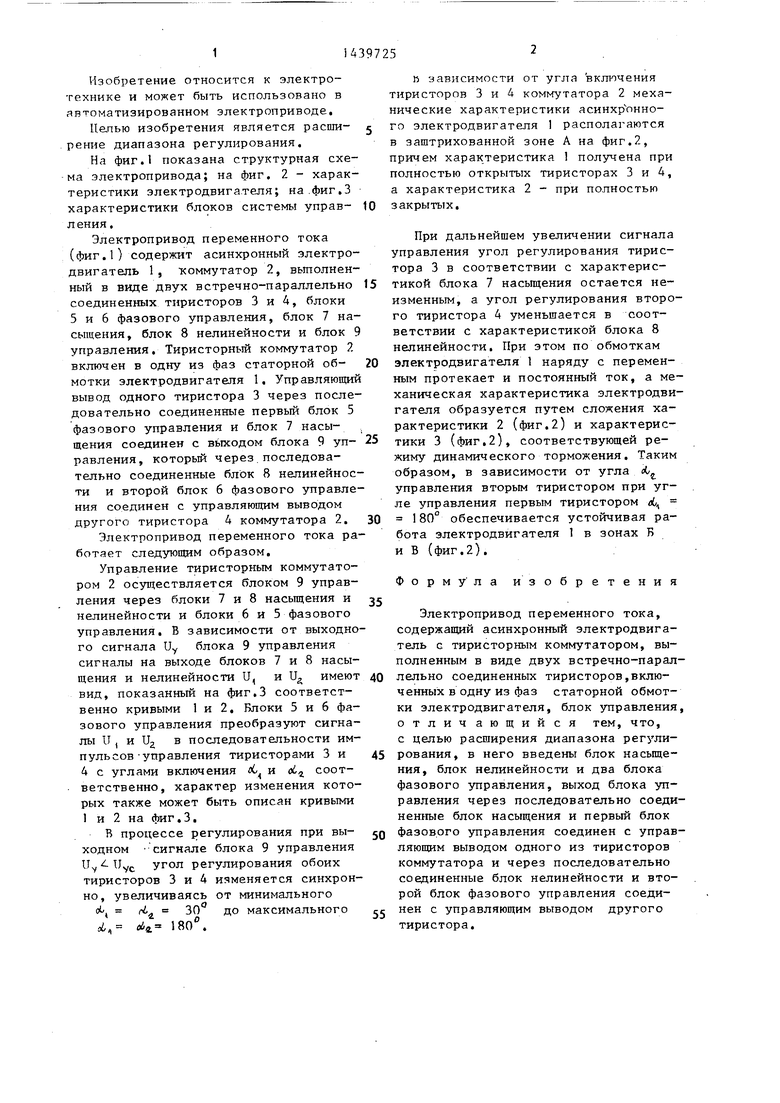
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1979 |
|
SU847480A1 |
| Электропривод переменного тока | 1984 |
|
SU1166254A1 |
| Асинхронный электропривод с экстремальным управлением | 1985 |
|
SU1403324A1 |
| Электропривод переменного тока | 1987 |
|
SU1436260A1 |
| Электропривод переменного тока | 1984 |
|
SU1259456A1 |
| Электропривод переменного тока | 1979 |
|
SU849403A1 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1981 |
|
SU1037402A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1978 |
|
SU698106A1 |
| Электропривод переменного тока | 1986 |
|
SU1376205A1 |
| Асинхронный электропривод | 1986 |
|
SU1334346A1 |
Изобретение относится к электротехнике и может быть исйользовано в автоматизированном электроприводе. Целью изобретения является расширение диапазона регулирования. Электропривод переменного тока содержит асинхронный электродвигатель 1, коммутатор 2, СОСТОЯ1ЦИЙ из встречно-параллельно соединенных тиристоров 3 и 4, блоки фазового управления 5 и 6, блок насыщения 7 блок нелинейности 8, блок управления 9. В процессе регулирования в начале углы управления тиристорами 3 и 4 изменяются синхронно, увеличиваясь до oi o6g 180 . При дальнейшем увеличении управляющего сигнала на выходе блока 9 в соответствии с характеристиками блоков 7 и 8 угол управления тиристором 3 остается неизменным, а угол управления тиристором 4 уменьшается. .При ЭТОМ на электродвигатель 1 подается как переменный, так и постоян- ный ток, 3 ил. g СО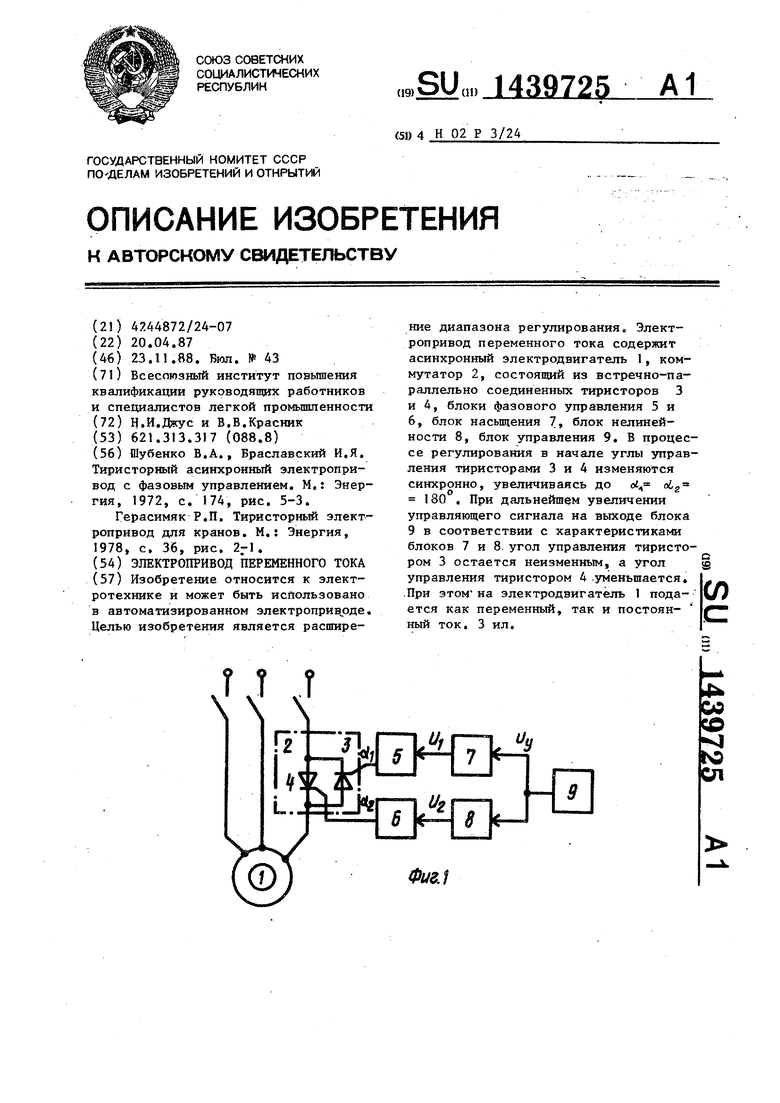
Фи&1
Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе.
Цепью изобретения является расши- рение диапазона регулирования.
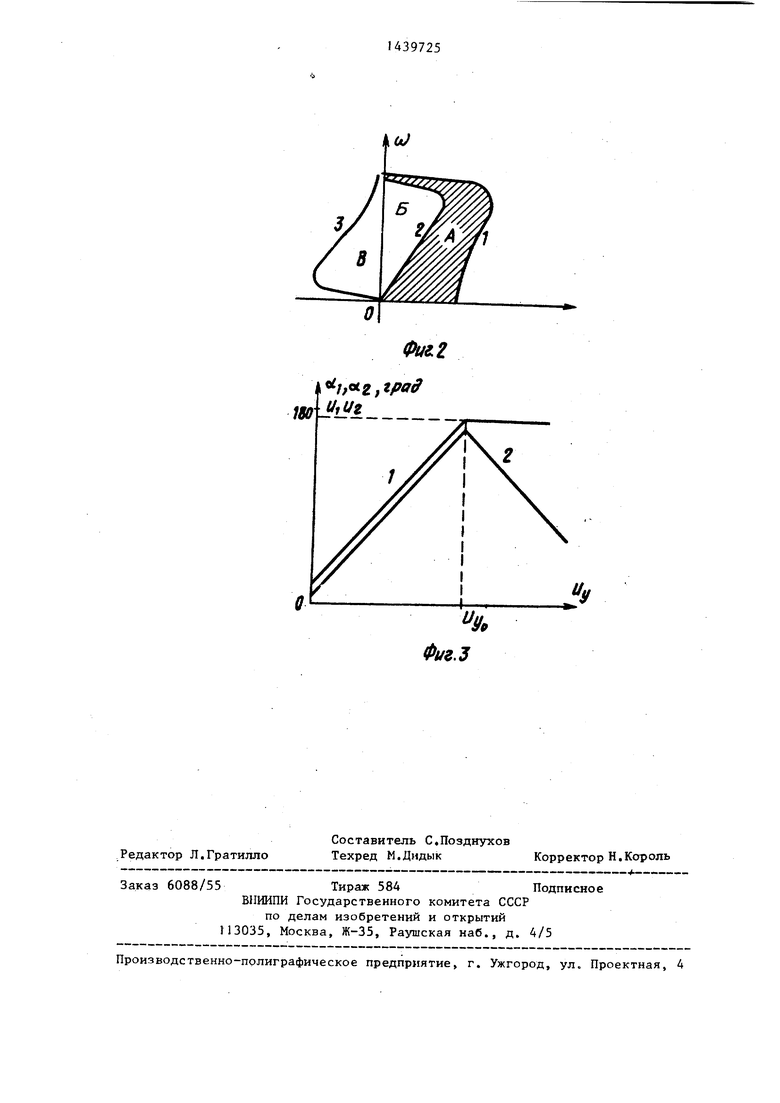
На фиг.1 показана структурная схема электропривода; на фиг, 2 - характеристики электродвигателя; на.фиг,3 характеристики блоков системы управ- ления.
Электропривод переменного тока (фиг.1) содержит асинхронный электродвигатель 1, коммутатор 2, вьтолнен- ный в виде двух встречно-параллельно соединенных тиристоров 3 и 4, блоки 5 и 6 фазового управления, блок 7 насыщения, блок 8 нелинейности и блок 9 управления, Тиристорньй коммутатор 2 включен в одну из фаз статорной об- мотки электродвигателя 1, Управляющий вывод одного тиристора 3 через последовательно соединенные первый блок 5 фазового управления и блок 7 насы- щения соединен с вьпсодом блока 9 уп- равления, который через.последовательно соединенные блок 8 нелинейности и второй блок 6 фазового управления соединен с управляющим выводом другого тиристора 4 коммутатора 2,
Электропривод переменного тока работает следующим образом.
Управление тиристорным коммутатором 2 осуществляется блоком 9 управления через блоки 7 и 8 насыщения и нелинейности и блоки 6 и 5 фазового управления, В зависимости от выходного сигнала Uy блока 9 управления сигналы на выходе блоков 7 и 8 насыщения и нелинейности U, и U имеют вид, показанный на фиг,3 соответственно кривыми 1 и 2, Блоки 5 и 6 фазового управления преобразуют сигналы U , и Uj в последовательности импульсов -управления тиристорами 3 и 4 с углами включения оС и od соот- ветственно, характер изменения которых также может быть описан кривыми 1 и 2 на фиг43,
В процессе регулирования при вы- ходном сигнале блока 9 управления и, Ily угол регулирования обоих тиристоров 3 и 4 ияменяется синхронно, увеличиваясь от минимального
оС,
Y
cL, xl4 180 .
до максимального
ь зависимости от угла включения тиристоров 3 и 4 коммутатора 2 механические характеристики асинхр онно- го электродвигателя 1 располагаются в заштрихованной зоне А на фиг,2, причем характеристика 1 получена при полностью открытых тиристорах 3 и 4, а характеристика 2 - при полностью закрытых.
При дальнейщем увеличении сигнала управления угол регулирования тиристора 3 в соответствии с характеристикой блока 7 насыщения остается неизменным, а угол регулирования второго тиристора 4 уменьшается в соответствии с характеристикой блока 8 нелинейности. При этом по обмоткам электродвигателя 1 наряду с переменным протекает и постоянный ток, а механическая характеристика электродвигателя образуется путем сложения характеристики 2 (фиг,2) и характеристики 3 (фиг,2), соответствующей режиму динамического торможения. Таким образом, в зависимости от угла с(, управления вторым тиристором при угле управления первым тиристором Л, 180° обеспечивается устойчивая работа электродвигателя 1 в зонах Б и В (фиг,2),
Форму ла изобретения
Электропривод переменного тока, содержащий асинхронный электродвигатель с тиристорным коммутатором, выполненным в виде двух встречно-параллельно соединенных тиристоров,включенных в одну из фаз статорной обмотки электродвигателя, блок управления, отлич ающий ся тем, что, с целью расширения диапазона регулирования, в него введены блок насыщения, блок нелинейности и два блока фазового управления, выход блока управления через последовательно соединенные блок насыщения и первый блок фазового управления соединен с управляющим выводом одного из тиристоров коммутатора и через последовательно соединенные блок нелинейности и второй блок фазового управления соединен с управляющим выводом другого тиристора.
Фиг,2
| Шубенко В.А., Браславский И,Я | |||
| Тиристорный асинхронный электропривод с фазовым управлением | |||
| М.: Энергия, 1972, с | |||
| Способ прикрепления барашков к рогулькам мокрых ватеров | 1922 |
|
SU174A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Герасимяк Р.П | |||
| Тиристорный электропривод для кранов | |||
| М.: Энергия, 1978, с | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
