со
00
to
ся на входы фазового детектора 6, на выходе которого получают последо- ва;тельность прямоугольных однополяр- ных импульсов неизменной амплитуды, длительность которых равна углу сдвига между действительным значением тока и реальным, который протекает в фазе асинхронного электродвигателя, которые представляют собой сигнал ошибки. Сигнал ошибки поступает на вход активного фильтра 8 третьего I порядка, с помощью которого последо- I вательность этих прямоугольных им- I пульсов преобразуется в гладкое постоянное напряжение, по величине пропорциональное ошибке. Данное напряжение подается как управлякщее на вход тиристорного регулятора 2 напряжения. Таким образом, данная система при всех нагрузках, не превьш1аю- щих номинальную, является системой стабилизации скольжения асинхронного электродвигателя 1. При этом потребляемая активная мощность асинхронным электродвигателем при всех нагрузках имеет минимальное значение, что обеспечивает минимальное потребление активной мощности из сети.1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для экстремального управления асинхронным электродвигателем | 1988 |
|
SU1653111A1 |
| Устройство для торможения трехфазного асинхронного электродвигателя | 1981 |
|
SU974531A1 |
| Многодвигательный электропривод переменного тока | 1988 |
|
SU1661958A1 |
| Электропривод переменного тока | 1989 |
|
SU1753574A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1690161A1 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1981 |
|
SU1001410A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1991 |
|
RU2056699C1 |
| АВТОНОМНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2093378C1 |
| Асинхронный электропривод | 1986 |
|
SU1334346A1 |
| Частотно-регулируемый электропривод грузоподъемного механизма | 1985 |
|
SU1365333A1 |
Изобретение относится к электро технике и может быть использовано для управления нерегулируемым при 1/ постоянной частоте асинхронньм электродвигателем с короткозамкнутым ротором. Целью изобретения является упрощение и снижение энергозатрат. В асинхронном электроприводе с экстремальным управлением с помощью формирователя 3 прямоугольных импульсов напряжение несинусоидальной формы от протекания тока через активное сопро тивление 10 преобразуется в переменное напряжение прямоугольной формы, синхронизированное с моментом перехода тока через ноль. Этот сигнал и сигнал с выхода блока 7 определения состояния тиристоров, а также инверсные им сигналы, получаемые с помощью фазоинверторов 4 и 5, подают S сл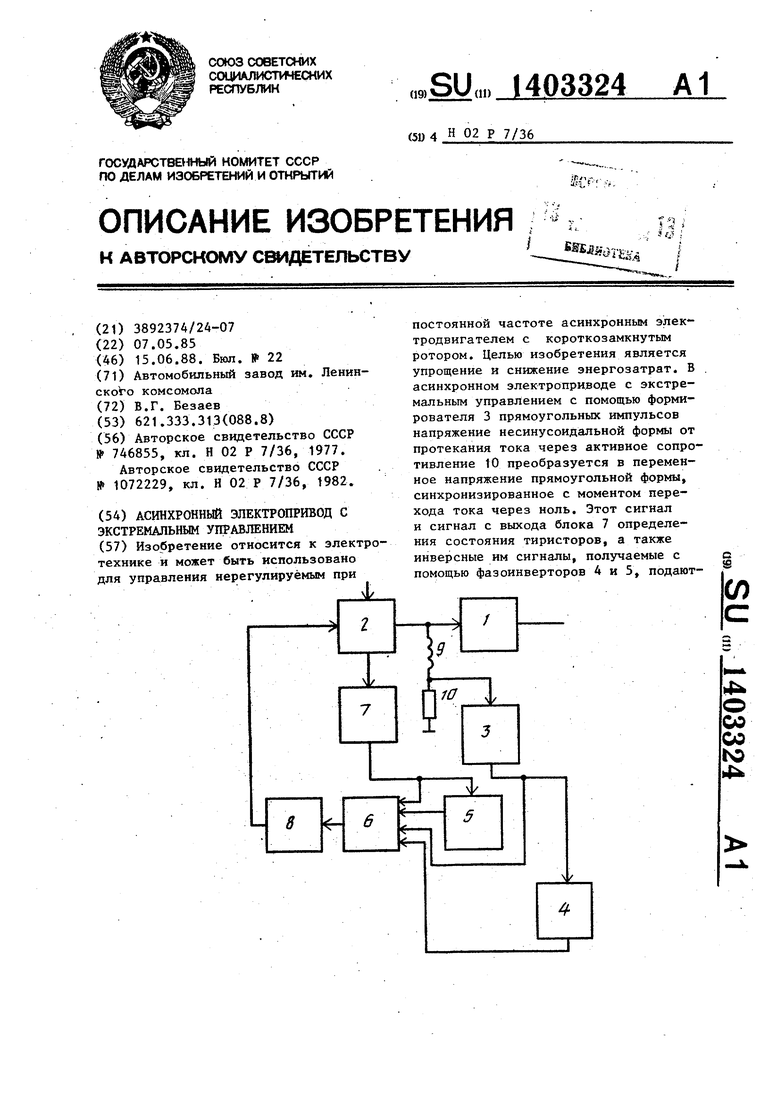
1
Изобретение относится к электротехнике и может быть использовано для управления нерегулируемым по угловой скорости и работающим при по- стоянкой частоте асинхронным электро двигателем с короткозамкнутым ротором.
Цель изобретения - упрощение и снижение энергозатрат.
На чертеже представлена блок-схе- ма устройства.
Асинхронный электропривод с экстремальным управлением содержит трехфазный асинхронный электродвигатель 1, в фазах статорной обмотки которо- го включен тиристорньй регулятор напряжения 2, входом подключенный к источнику питания , формирователь 3 прямоугольных, импульсов, два фазоинвер- тора 4 и 5, выходы которых соединены с первым и .вторым входами фазового дететора б,третий вход которого соединен с выходом формирователя 3 прямоугольны импульсов и со входом первого фазо- инвертора 4, четвертый вход фазового детектора б объединен со входом второго фазоинвертора 5 и соединен с выходом блока 7 определения состояния тиристоров, входом соединенного с тиристорами тиристорного регулятора 2 напряжения, управляющий вход которого соединен с выходом активного фильтра 8 третьего порядка вход которого соединен с выходом фазового детектора б, индуктивный элемент 9 одним выводом соединен с фазным выводом статорной обмотки электродвигателя, другой вывод индуктивного элемента 9 соединен со входом формирователя 3 прямоугольных импульсов и через резистор 10 соединен с общим проводом.
Асинхронный электропривод с экстремальным управлением работает как статическая система стабилизации угла сдвига действительного значения тока относительно сетевого напряжения, В качестве сигнала задания используется угол сдвига действительного значения тока, получаемого с помощью модели. Модель состоит из последовательно соединенных индуктивного элемента 9 и резистора 10 и подсоединена к фазному выводу статорной обмотки электродвигателя. Таким образом, фазное напряжение подключено к фазе асинхронного электродвигателя 1 и к модели, состоящей из последовательно соединенных индуктивного элемента 9 и резистора 10. Асинхронный электродвигатель 1 при работе с постоянным скольжением можно представить моделью в виде последовательного соединения индуктивного и активного сопротивления. Таким образом, угол сдвига действительного значения тока, получаемого на модели, соответствует работе асинхронного электродвигателя 1 с постоянньм скольжением при переменной нагрузке на валу асинхронного электродвигателя 1 и при различных значениях напряжения на зажимах статора асинхронного электродвигателя 1 с учетом всех высших
гармоник тока. Это означает, что с помощью данной модели получается информация об угле сдвига действительного значения тока относительно сетевого напряжения при постоянном скольжении угла.Блок 7 определения состояния тиристоров входом подключен параллельно двум тиристорам, включенны встречно-параллельно так, что на выходе блока 7 определения состояния тиристоров получается сигнал прямоугольной формы, который позволяет судить о протекании тока через них. По состоянию этих двух тиристоров можно судить о реальном значении угла сдвига фазного тока асинхронного электродвигателя 1, которое может отличаться от значения, полученного из модели, за счет того, что скольжение асинхронного электродвигателя не являе:тся постояннь1м при различных значениях момента нагрузки на валу двигателя.
С помощью формирователя 3 прямоугольных импульсов напряжение несинусоидальной формы от протекания тока через резистор 10 преобразуется в переменное напряжение прямоугольной формы, синхронизированное с моментом перехода тока через ноль. Этот сигнал и сигнал с выхода блока 7 определения состояния тиристоров, а также инверсные им сигналы, получаемые с помощью фазоинверто.ров 4 и 5, подаются на входы фазового детектора 6, вьшолненного, например, на логических интегральных элементах. На выходе фазового детектора 6 получают последовательность прямоугольных од- нополярных импульсов неизменной ам- плитуды, длительность которых равна углу сдвига между действительным значением тока, получаемого из модели, и реальным, который протекает в фазе асинхронного электродвигателя 1, которые представляют собой сигнал ошибки. Углы сдвигов тока, получаемого из модели, и реального тока синхронизированы относительно сетевого напряжения. Сигнал ошибки поступает на вход активного фильтра 8 третьего порядка, имеющего частоту среза 100 Гц и спад амплитудно-частотной характеристики при более вы- . соких частотах с наклоном 60 дБ,, . с помощью которого последовательность этих прямоугольных импульсов
03324
преобразуется в гладкое постоянное напряжение, по величине пропо1 цио- нальное ошибке. Данное напряжение подается как управляющее на вход тиристорного регулятора 2 напряжения. Таким образом, данная система при всех нагрузках, не превышающих минимальную, является системой стаби10 лизации скольжения асинхронного
электродвигателя 1, При этом, потребляемая активная мощность асинхронным электродвигателем 1 при всех нагрузках имеет минимальное значение, что
15 обеспечивает минимальное потребление активной мощности из сети. Величину индуктивности индуктивного элемента 9 и сопротивления резистора 10 следует выбирать на один - два порядка
20 больше значений сопротивлений асин- хронного электродвигателя. Пуск электродвигателя 1 осуществляется подачей сетевого напряжения на тирис- торный регулятор 2 напряжения. При
25 этом, регулировочная характеристика регулятора 2 смещена таким образом, что при отсутствии сигнала на его входе и при подаче сетевого напряже
ния, на выходе данного регулятора 2 будет напряжение в несколько вольт. Этого будет достаточно для формирования сигнала задания.
Асинхронный электродвигатель с экстремальным управлением имеет достаточно простую схему, обладает высоким быстродействием, стабильностью, удобен в наладке и эксплуатации, надежен, высокоэкономичен и может быть использован в массовых электроприводах малой, средней и большой мощности. Не содержит датчиков тока и напряжения, которые представляют собой намоточные изделия, что особенно важно при его серийном производстве.
Ф о
е т е н и я
0
5
рмула изобр
Асинхронный электропривод с экстр.е- мальным управлением, содержащий трек- фазный асинхронный электродвигатель, в фазах статорной обмотки которого включен тиристорный регулятор напряжения , входом подключенный к источнику питания, Формирователь прямо- и- угольных импульсов, два фазоинверто ра, выходы которых соединены с первым и вторым входами фазового детектора, третий вход которого соединен с выходом формирователя прямоугольifbnc импульсов и с входом первого фазоинвертора, четвертый вход фазового детектора объединен с входом второго фаэоинёертора, активный фильтр третьего порядка, отличающийся тем, что, с целью упрощения и снижения энергозатрат, в него введены резистор и индуктив- йый элемент, блок определения состо- Лгния тиристоров, входом соединенный е тиристорами тиристорного регулятора напряжения, управляющий вход крто
рого соединен с выходом активного фильтра третьего порядка, вход которого соединен с выходом фазового детектора, четвертый вход которого соединен с выходом блока определения состояния тиристоров, индуктивный элемент одним.вьшодом соединен с фазным выводом статорной обмотки электродвигателя, другой вывод индуктивного элемента соединен с входом формирователя прямоугольных импульсов и через резистор - с общим проводом.
| Асинхронный электропривод с экстремальным управлением | 1977 |
|
SU746855A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Асинхронный электропривод с экстремальным управлением | 1982 |
|
SU1072229A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
