144
Изобретение относится к геофкзшсе к вспомогательным устройствам, применяемым при проведении геофизических работ в морских условиях а именно к устройствам для подборки сейсмических кос гидроакустических буев.
Целью изобретения является повышение производительности работ на акваториях.
На фиг.1 показана схема гидроакус тического буя; на фиг,2 - предложенное устройство для подборки сейсмических кос, вид спереди, на фиг.З
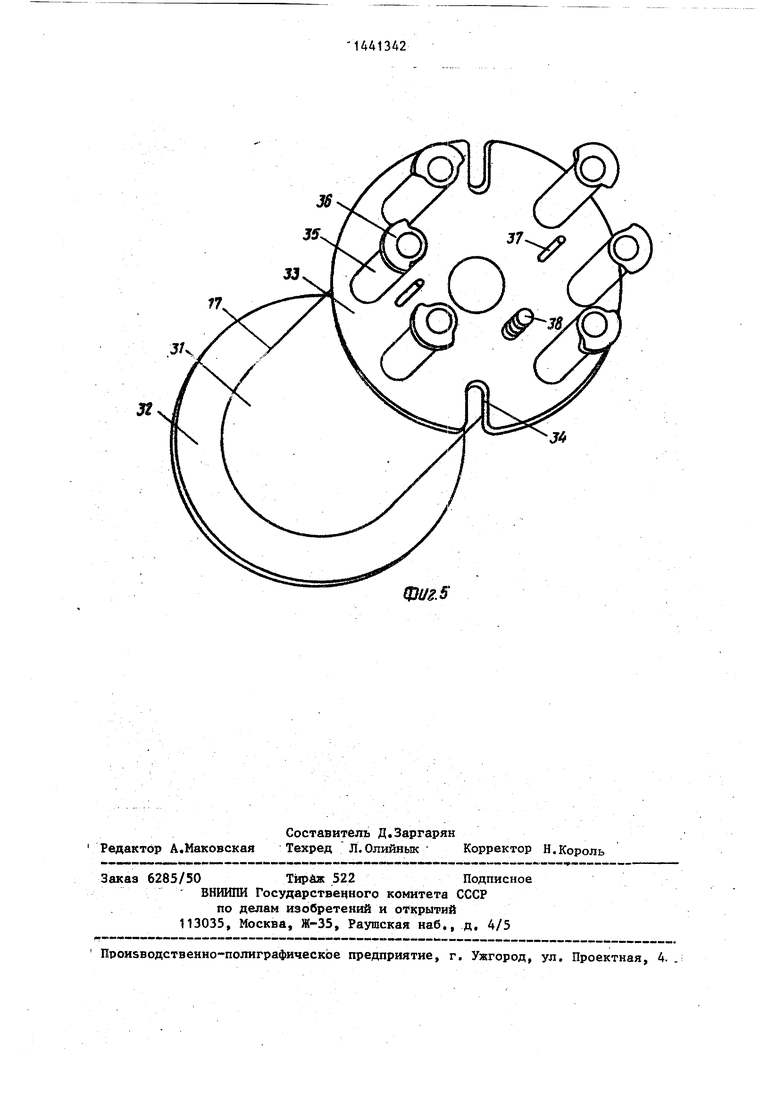
то же, вид сверху на фиг,4 - то же, вид сбокуi на фиг.З - внешний вид барабана (аксонометрия), который может быть использован в предложенном устройстве для подборки сейсмических кос.
Гидроакустический буй (фнг.1) состоит из поверхностного буя 1, внутри корпуса которого расположена сейсмо- станция, соединенная посредством ка
бельного разъема 2 через соединитель-25 Кроме того, на реборде установлены
ный участок 3 с сейсмокосой 4, Соединительный участок выполнен в разгруженном, варианте для предотвращения воздействия динамических и ударных нагрузок от волнения моря на кабель- ньй разъем.
Вдоль сейсмокосы 4 на выносах 5 расположены сейсмоприемники 6, В верхней части сейсмокосы (при ее рабочем положении) расположен узел 7 крепления сейсмокосы к бую, а в нилшей ее час7 И - узел 8 крепления сейсмокосы к рыбовидному грузу 9 (типа.РГГ25) ,
Устройство для подборки сейсми ческ1г1х: кос (фиг,2) состоит из рамы 10, на которой закреплен мотор-редуктор 11, на быстроходном валу которого установлен колодочный тормоз 12, а тизсоходньй вал связан с фрикционной муфтой 13, шпилевой катушкой 14 и вькодным валом 15„ На выходном валу посредством замка 16 крепится барабан 17, На раме рядом с мотор-редуктором на кронштейнах установлена система 18 управления, включ шщая разъемы для подключения кабелей питания и дистанционного управления, пускатель и выключатель.
Фрикционная ьгуфта имеет, рукоятку 19 управления (фиг.З) На раме установлен также откидной упор 20, кото- рьй может содержать фиксатор для ее фиксации в вьщвинутом полож.ении Стрела 21 (фиг,4) представляет собой
30
35
45
50
55
два штыря 37 и резьбовая втулка 38 под кабельный резъем сейсмокосы.
Устройство для подборки сейсмических кос гидроакустических буев работает следующим образом.
При подготовке устройства к рабо те откидной упор 20 и стрелу 21 ус- танавлизают перпендикулярно продоль ной стороне рамы 10 и фиксируют в таком положении.
Используя колеса 26, устройство подкатывают к борту судна так, чтоб стрела выступала за борт на .400 - 600 мм, после чего винтовьми домкра тами 25 устройство поднимают на 2030 мм, чем обеспечивается его устой чивость на борту судна. После этого раму 10 устройства при помощи цепей талрепов крепят; на палубе судна.
При спуске гидростатического буя на воду кабельные разъемы системы 18 управления подключают к бортозо- му питаншо и кабелю дистанционного управления. Барабан 17 с косой на- деваит на выходной вал 13 устройств и крепят замком 16. Так как вал мо- тор-редуктора 11 при отключенном электропитании заторможен колодочным тормозом 12 (типа ТКТ-100), то барабан 17 с сейсмокосой 4 не вращается Рукояткой 19 управления фрикционной муфты 1 3 отсоединяют выходной вал I 3 от мотор-редутстора 11, узел 8 крепл ния сейсмокосы 4 снимают со штыря
консольную ферму, выполненную из тонкостенных труб, расположенных треугольником, на одном конце которой имеется узел 22 стыковки с рамой, а на другом посредством вертлюга 23 подвешен подъемный ролик 24, На стреле, откидной лапе и раме установлены винтовые-домкраты 25. На раме имеются так:ке колеса 26 для передвижения устройства в нерабочем состоянии по палубе судна. На раме закреплена вертикальная стойка 27, в верхней .части
которой расположена подвижная относительно стойки втулка 28, Втулка связана одной тягой с укладочным роликом 29, а другой - с рычагом 30 управления«
Барабан (фиг.З) содержит цилиндрическую обечайку 31 и две реборды 32 и 33, Реборда 33 содержит радиальные пазы 34, а на внешней ее сторона расположены стаканы 33, на внешних краях которых выполнены приливы 36.
0
5
5
0
5
два штыря 37 и резьбовая втулка 38 под кабельный резъем сейсмокосы.
Устройство для подборки сейсмических кос гидроакустических буев работает следующим образом.
При подготовке устройства к работе откидной упор 20 и стрелу 21 ус- танавлизают перпендикулярно продольной стороне рамы 10 и фиксируют в таком положении.
Используя колеса 26, устройство подкатывают к борту судна так, чтобы стрела выступала за борт на .400 - 600 мм, после чего винтовьми домкратами 25 устройство поднимают на 20. 30 мм, чем обеспечивается его устойчивость на борту судна. После этого раму 10 устройства при помощи цепей талрепов крепят; на палубе судна.
При спуске гидростатического буя на воду кабельные разъемы системы 18 управления подключают к бортозо- му питаншо и кабелю дистанционного управления. Барабан 17 с косой на- деваит на выходной вал 13 устройства и крепят замком 16. Так как вал мо- . тор-редуктора 11 при отключенном электропитании заторможен колодочным тормозом 12 (типа ТКТ-100), то барабан 17 с сейсмокосой 4 не вращается. Рукояткой 19 управления фрикционной муфты 1 3 отсоединяют выходной вал I 3 от мотор-редутстора 11, узел 8 крепления сейсмокосы 4 снимают со штыря
37, саму сейсмокосу проводят через радиальный паз 34 барабана 17 и, вращая вручную барабан, отматывают несколько метров сейсмокосы 4, после чего рукояткой 19 управления фрикционной муфты 13 соединяют выходной вал 15 с мотор-редуктором 11, в результате чего вращение барабана 17 затормаживается колодочным тормозом ig 12. Сейсмокосу 4 перебрасывают на подъемный ролик 24. К узлу 8 сейсмокосы 4 крепят рыбовидный груз 9 и опускают конец сейсмокосы 4 с грузом 9 за борт судна. Рукояткой 19 отсое- 15 диняют выходной вал 15 с барабаном 17, в результате чего он под действием груза 9 начшшет вращаться. Сейс- мокоса 4 сматывается с барабана 17, .проходит через ролик 24 и спускается 2о за борт судна. При подходе сейсмопри- емника 6 рукояткой 19 заторма кивается и останавливается вращение барабана 17. Сейсмоприемник 6 вынимают из стакана 35, его вынос 5 проводят через 25)равления включают питание на мотор- ра,циапьньй паз 34, затем сейсмоприем- редуктор 11, который начинает рабосистемы 18 управления подключают к бортовому питанию и кабелю дистанци онного управления. Пустой барабан 1 надевают на выходной вал 15 устройс ва и крепят замком 16.
Буй 1 поднимают на борт судна. : Кабельньй разъем 2 отсоединяют о буя и подсоединяют к резьбовой втул ice 38. Соединительный участок 3 сей мокосы А (участок между кабельным разъемом 2 и узлом 7) тфоводят межд двумя соседними стаканами 35 и нама тывают поверх стаканов. Соскальзьта нию со стаканов намотанного участка 3 препятствуют приливы 36 на внешни краях стаканов 35. Когда весь учас- ток 3 сейсмокосы 4 будет намотан на стаканы 35, узел 7 крепления сейсмо косы отсоединяют от буя 1 и крепят на одном из штырей 37. Сейсмокосу 4 укладывают в радиальный паз 34 в р борде 33 и переводят на подъемный ролик 24. Выключатели в системе упник 6 и его вынос 5 проводят вручную через ролик 24 за борт судпа„ Выходной вал 15 с барабаном 17 рукояткой 19 управления фрикционной муфты 13 отсоединяют от колодочного тормоза 12, и под действием рыбоввдного груза 9 барабан начинает вращаться. Когда вся сейсмокоса будет размотана, рукояткой 19 останавливают вращение выходного 1 5 с барабаном 1 7 ,узел 7 крепления сейсмокосы к бую снимают со штыря 37 и крепят к бую 1.
Затем, освобождая барабан 17 рукояткой 19, вращают барабан и сматывают участок 3 сейсмокосы со стаканов 35. Остановив барабан,-кабельньй разъем 2 отсоединяют от втулки 38 и подсоединяют к бую 1, а сам буй переводят за борт судна и ставят на воду.
Размотку сейсмокосы можно производить также при помощи мотор-редуктора 11, Для этого вращением и остановкой выходного вала 15 с барабаном 17 управляют с пульта 18 управления работой мотор-редуктора 11 и колодочного тормоза 12, при этом принцип затормаживания заключается в неподвижности вала мотор-редуктора 11, заторможенного колодочным тормозом 12 при отсутствии питания на мотор-редукторе 1 1 .
При подъеме гидроакустического буя на борт судна кабельные разъемы
30
35
40
тать. Одновременно отсоединяют Лояо- дочный тормоз 12 и вращение от мотор редуктора 11 через фрикционную муфту 13 передается выходному валу 15, вместе с котьрым начинает вращаться и барабан 17. Поднимаемая сейсмокоса 4 проходит через ролик 24 и наматывается на обечайку 31 барабана 17. Равномерную укладку на обечайку 31 обеспечивают посредством укладочного ролика 29, управляя им t. рычагом 30. Йри подходе сейсмодатчика 6 питание на мотор-редуктор 11 снимается, одно временно включается колодочный тормоз 12, в результате чего выходной вал 15 останавливается и затормаживается. Останавливается и затормаживается барабан 17. Сейсмоприемник 6 с выносом 5 вручную проводят через ролик 24, вынос 5 проводят через радиальньй паз 34 в реборде 33, а сам Сейсмоприемник устанавливают в одном из стаканов 35, после чего включают мотор-редуктор 11 и продолжают намотку сейсмокосы 4 на обечайку 31 барабана 17.
Когда вся сейсмокоса 4 будет намотана, узел 8 отсоединяют от груза 9, саму сейсмокосу 4 проводят через радиальньй паз 34, а узел 8 крепят на втором штыре 37.
Подъемом сейсмокосы можно управлять не отключая мотор-редуктор 11,.
45
50
равления включают питание на мотор- редуктор 11, который начинает рабосистемы 18 управления подключают к бортовому питанию и кабелю дистанционного управления. Пустой барабан 17 надевают на выходной вал 15 устройства и крепят замком 16.
Буй 1 поднимают на борт судна. : Кабельньй разъем 2 отсоединяют от буя и подсоединяют к резьбовой втул- ice 38. Соединительный участок 3 сейсмокосы А (участок между кабельным разъемом 2 и узлом 7) тфоводят между двумя соседними стаканами 35 и наматывают поверх стаканов. Соскальзьта- нию со стаканов намотанного участка 3 препятствуют приливы 36 на внешних краях стаканов 35. Когда весь учас- . ток 3 сейсмокосы 4 будет намотан на стаканы 35, узел 7 крепления сейсмокосы отсоединяют от буя 1 и крепят на одном из штырей 37. Сейсмокосу 4 укладывают в радиальный паз 34 в реборде 33 и переводят на подъемный ролик 24. Выключатели в системе уп0
5
0
тать. Одновременно отсоединяют Лояо- дочный тормоз 12 и вращение от мотор- редуктора 11 через фрикционную муфту 13 передается выходному валу 15, вместе с котьрым начинает вращаться и барабан 17. Поднимаемая сейсмокоса 4 проходит через ролик 24 и наматывается на обечайку 31 барабана 17. Равномерную укладку на обечайку 31 обеспечивают посредством укладочного ролика 29, управляя им t. рычагом 30. Йри подходе сейсмодатчика 6 питание на мотор-редуктор 11 снимается, одновременно включается колодочный тормоз 12, в результате чего выходной вал 15 останавливается и затормаживается. Останавливается и затормаживается барабан 17. Сейсмоприемник 6 с выносом 5 вручную проводят через ролик 24, вынос 5 проводят через радиальньй паз 34 в реборде 33, а сам Сейсмоприемник устанавливают в одном из стаканов 35, после чего включают мотор-редуктор 11 и продолжают намотку сейсмокосы 4 на обечайку 31 барабана 17.
Когда вся сейсмокоса 4 будет намотана, узел 8 отсоединяют от груза 9, саму сейсмокосу 4 проводят через радиальньй паз 34, а узел 8 крепят на втором штыре 37.
Подъемом сейсмокосы можно управлять не отключая мотор-редуктор 11,.
5
0
.i
П
Фиг.2
/
/
/
/
2
i6
i


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для проведения смоточно-размоточных работ | 1987 |
|
SU1434381A1 |
| УСТРОЙСТВО ДЛЯ ПОДБОРКИ СЕЙСМИЧЕСКИХ КОС | 1993 |
|
RU2054701C1 |
| Установка для подборки сейсмических кос | 1984 |
|
SU1200214A1 |
| Устройство для подборки сейсмоприемников | 1982 |
|
SU1092447A1 |
| Устройство для проведения смоточно-размоточных работ | 1982 |
|
SU1099297A1 |
| Устройство для подборки сейсмических кос | 1983 |
|
SU1163291A1 |
| Комплекс для сейсморазведки в транзитных зонах на основе мультилинейной цифровой кабельной антенны | 2016 |
|
RU2650097C1 |
| ЯКОРНО-ШВАРТОВНЫЕ МЕХАНИЗМЫ | 2019 |
|
RU2721610C1 |
| КАБЕЛЬНЫЙ БАРАБАН ДЛЯ НАМОТКИ-РАЗМОТКИ СИЛОВОГО КАБЕЛЯ | 2024 |
|
RU2835173C1 |
| Способ проведения подводно-подледного сейсмопрофилирования с использованием перемещаемой подводным судном донной сейсморазведочной косы и технологический комплекс для его осуществления | 2014 |
|
RU2663308C2 |

Изобретение относится к геофизике, в частности к устройствам для подборки сейсмических кос гидроакустических буев. Цель - повьшение производительности работ на акваториях. За счет введения фрикционной муфт с рукояткой управления существенно упрощается проведение смоточно-р з- моточных работ. Введение выходного вала, снабженного замком для фиксации барабана, позволяет с помоцыо укладочного ролика осуяествить намотку сейсмокосы на барабан. 5 ил. с в
19
гз
Я5ге. J
25
ф1/гА
7,
J/
J-J
t/g.S
| Устройство для подборки сейсмических кос | 1983 |
|
SU1125571A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для подборки сейсмических кос | 1983 |
|
SU1117549A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
