Изобретение относится к сейсморазведке а jlMBHHOs к вспомогательным уройствам, пpимeIIяe ым при проведекки сейсморазведочных работ,
Известно устройство для подборки сейскичесгап : коС; содержащее автома1шпу, уйтаповленньш в ее кузове подборочньй агрегат с приводом и системой .управления, Подбор.очный агрегат данного устройства вьшблнен в виде раьш с закрепленны ш на ней кеподвкж io основными р.о.чиковыми опорами дву кольцевых -лент из эластичного материала s ка/эдая из которых: охватывает не менее, чем две основные роликовые опоры так,, что их внешние стороны сопрпкаспэтся донолнительной подвижной роликовой опорой с пружиной, обеспечивающей натяжение кольцевых лент и их пр{шим одна кдругой,причем . ролттковы-э оиорь5 расположены так, что расстояния Г.ШЖДУ их поверхностями превышают размеры, сейсыоприемников. .KpoNfe того, рама подборочного агрегата с основанием cBHsaiia механизмом перемещения подборочного агрегата относитсльно основания в поперечном наггравлен.ии для более равномерной уклаки сейсмической косы в кузове автомапгннЫа
Для рггскладки косы на npoi)iuie двигатель прршвда реверсируется и транспортирование косы осуп1ествляется в обратном направлении из кузова на грунт,
Поскольку подборочный агрегат перемещается в кузове автомобиля с помощью механизма перемещения в поперечном направлении и не выходит за г,абар11ты автомашины, то сейсмическая коса может укладываться за автомашиной5 не превышая ее цЕрины Uj
При проведении -сейсморазведочных работ вибрационными источниками 5 опорная плита которых; равна ширине источниковJ расположенная на проезжей части сейс№1ч:еская коса затрудняет выполнение сейсмо разведочных работ, что сужает эксплу атахщонныа возможности данного устройства,
Г{аиболее близким техническим решением к изобретению является устройство для подборки сейсмических кос,-содержащее транспортное средство с кузовом, расположенный в кузове подборочиьш механизм с ведущие барабагшм, ролики с-прюкимом и связанный с кузовом направляющий механизм с корпусом.
Подборочный механизм содержит ведущий барабан, кинематически связаннь й с электроприводом муфтой сцепления с заданным, крутящим моментом ,проскальзывания, ведомый барабан, соприкасающийся в горизонтальной плоскости по его образующей с ведупщм барабаном, установленный под пневмобарабаном косоукладчик, выполненный в вида полого вала, кинематически связанного1через периодический вариатор с ведомым барабаном, и наклонного лотка, закрепленного на нижнем торце полого вала для укладки сейсми:ческой косы в кольцевую бухту на днище косоприемной емкости,
ИаправляЪщий механизм содержит сварной корпус, на котором установлены направляющие ведомые барабаны. Корпус связан с кузовом с возможностью установки направляющего механизма в рабочее и транспортное положения 2j ,
Так как направляющие механизмы в известном устройстве расположены на боковьк стенках кузова, то сейстсческая коса укладывается на сейсморазведочиый профиль сбоку устройства, что затрудняет проведение сейсморазведочных работ на узких лесных дорогах, и ограничивает эксплуатационные возможности устройства.
Цель изобретения - расширение зксплуатагщонных возможностей устройства.
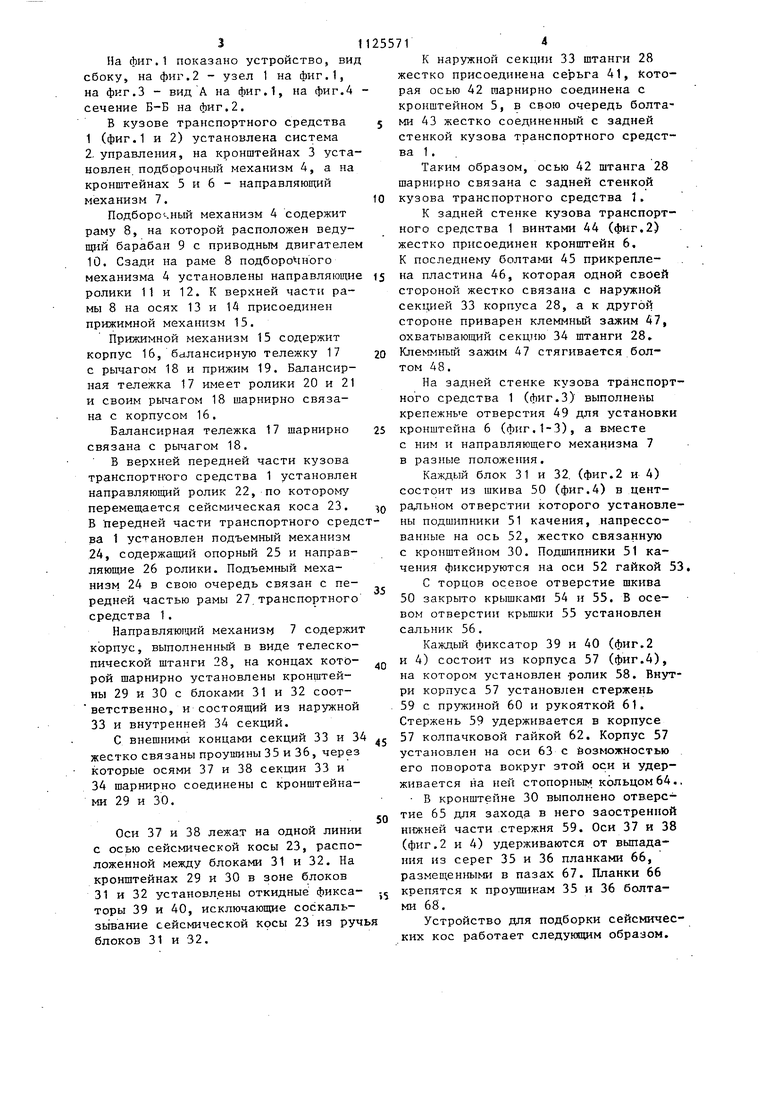
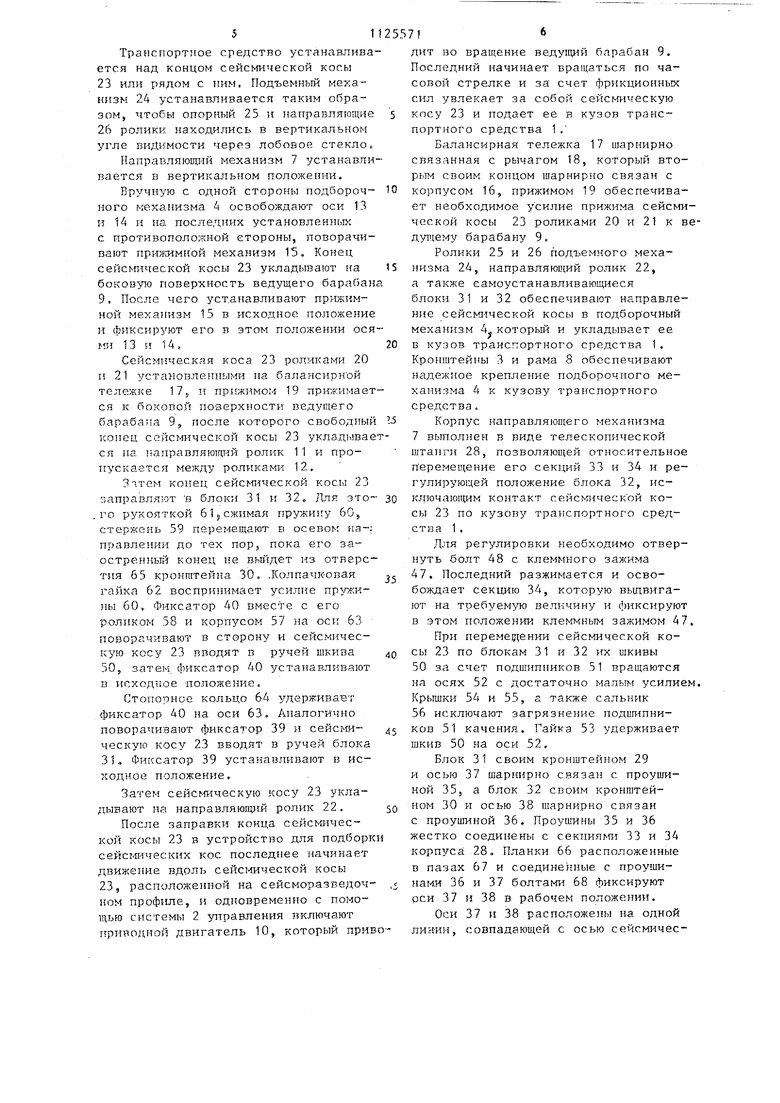
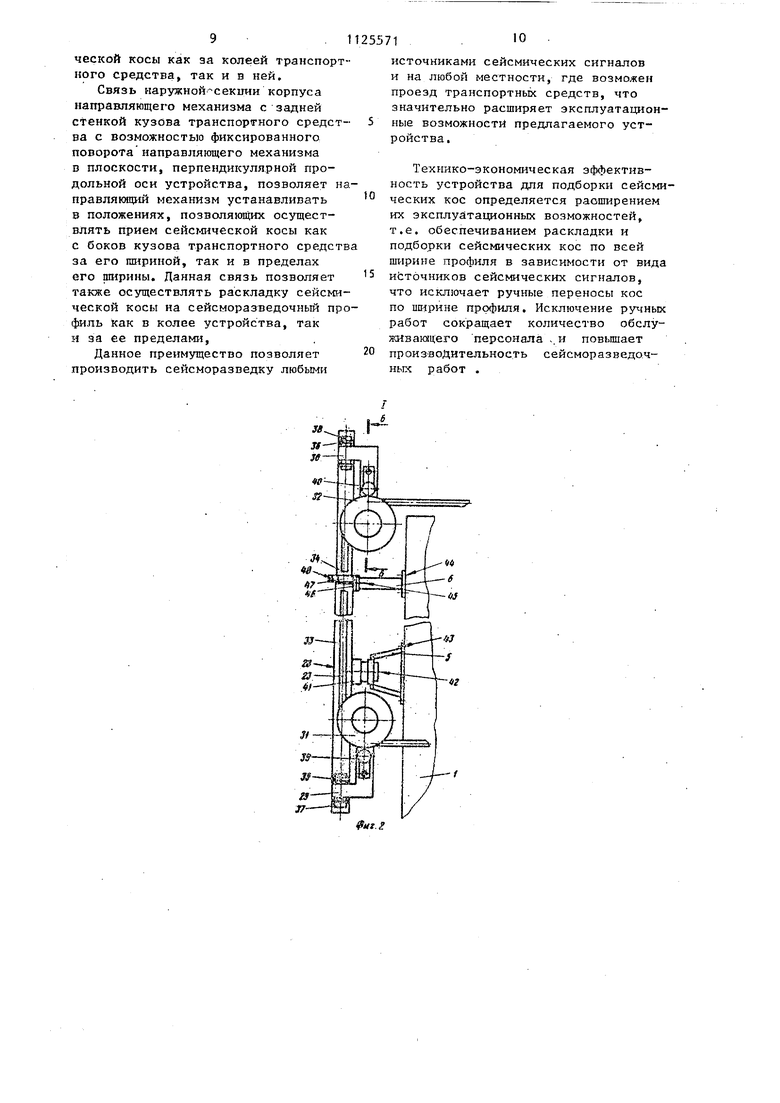
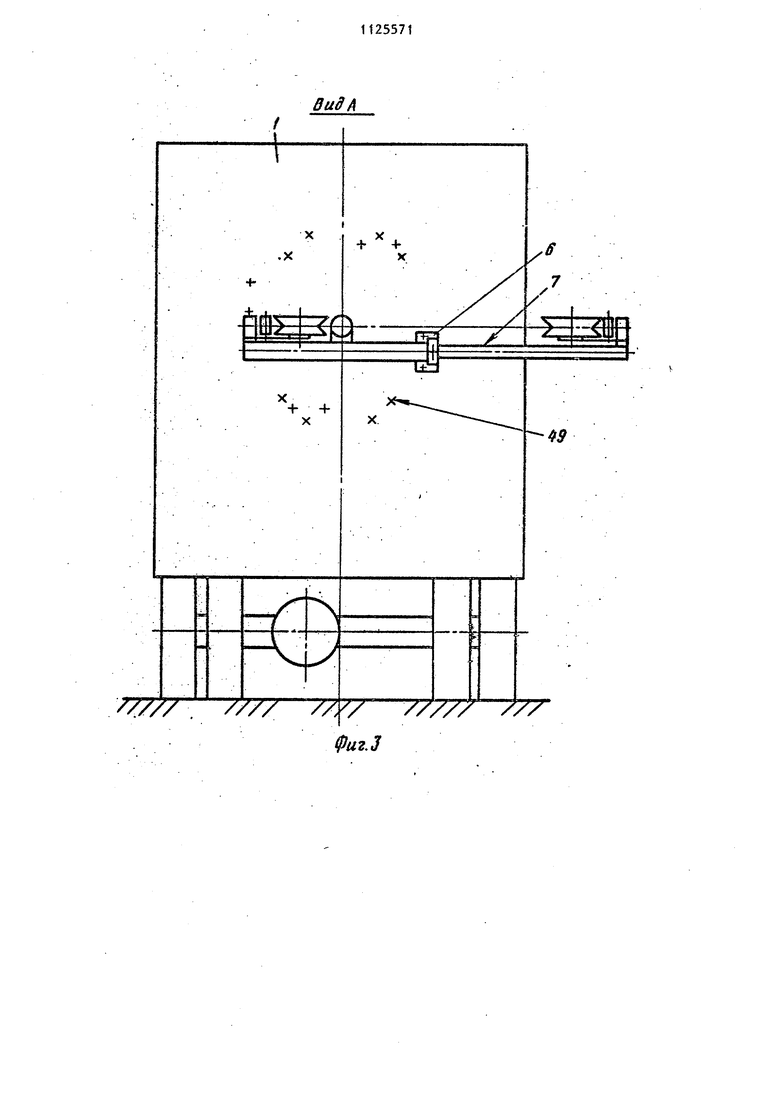
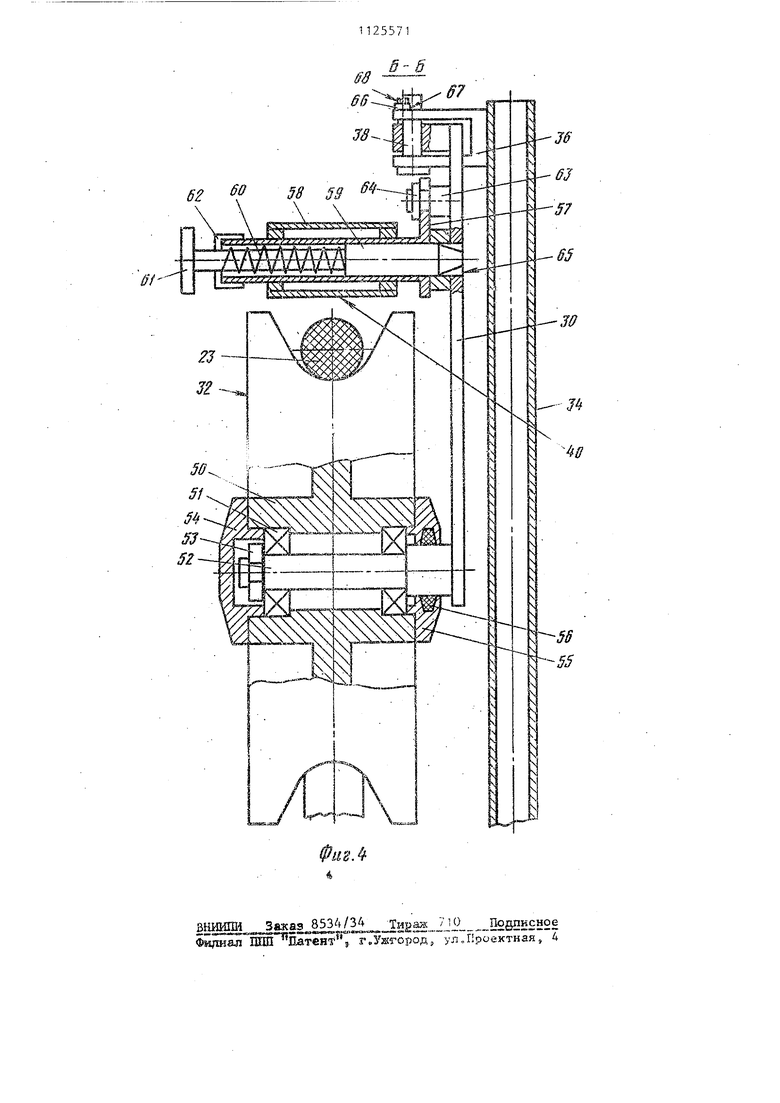
Указанная цель достигается тем, что Б устройстве для подборки сейсмических кос, содержащем транспортное сре,цство с кузовом, расположенный в кузове подборочный механизм с ведущим барабаном, ролики с прижимом и связанный .с кузовом направляющий механизм с корпусом, последний выполнен, в виде телескопической штангнг и. снабжен шарнирно закрегшенныьш с ее концами кронштейнами с блоками, причем оси шарниров установлены на линии, совпа- даюш.ей с осью, расположенной между блока1И5 сейсмической косы, а штанга одним концом связана с задней стенкой кузова с возможностью фиксированного поворота направляющего механизма в поперечной плоскости устройства. На фиг.1 показано устройство, ви сбоку, на фиг.2 - узел 1 на фиг.1, на фиг.З - вид А на фиг,1, на фиг.4 сечение Б-Б на фиг.2. В кузове транспортного средства 1 (фиг.1 и 2) установлена система 2. управления, на кронштейнах 3 уста новлен подборочный механизм 4, а на кронштейнах 5 и 6 - направляющий механизм 7. Подборочный механизм 4 содержит раму 8, на которой расположен ведущий барабан 9 с приводным двигателе 10. Сзади на раме 8 подборо гного механизма 4 установлены направляющи ролики 11 и 12. К верхней части рамы 8 на осях 13 и 14 присоединен прижимной механизм 15. Прижимной механизм 15 содержит корпус 16, балансирную тележку 17 с рычагом 18 и прижим 19. Балансирная тележка 17 имеет ролики 20 и 21 и своим рычагом 18 шарнирно связана с корпусом 16. Балансирная тележка 17 шарнирно связана с рычагом 18. В верхней передней части кузова транспортного средства 1 установлен направляющий ролик 22, по которому перемещается сейсмическая коса 23. В передней части транспортного сред ва 1 установлен подъемный механизм 24, содержацщй опорный 25 и направляющие 26 ролики. Подъемный механизм 24 в свою очередь связан с передней частью рамы 27 транспортного средства 1. Направляющий механизм 7 содержи корпус, выполненный в виде телескопической щтанги 28, на концах которой шарнирно установлены кронщтейны 29 и 30 с блоками 31 и 32 соответственно, и состоящий из наружной 33и внутренней 34 секций. С внещними концами секций 33 и 3 жестко связаны проушины 35 и 36, через которые осями 37 и 38 секции 33 и 34шарнирно соединены с кронштейнами 29 и 30. Оси 37 и 38 лежат на одной линии с осью сейсмической косы 23, расположенной между блоками 31 и 32. На кронштейнах 29 и 30 в зоне блоков 31 и 32 установлены откидные фиксаторы 39 и 40, исключающие соскальзь1вание сейсмической косы 23 из руч блоков 31 и 32. К наружной секции 33 штанги 28 жестко присоединена серьга 41, Которая осью 42 гаарнирно соединена с кронштейном 5, в свою очередь болтами 43 жестко соединенный с задней стенкой кузова транспортного средства 1 . Таким образом, осью 42 штанга 28 шарнирно связана с задней стенкой кузова транспортного средства 1. К задней стенке кузова транспортного средства 1 винтами 44 (фиг.2) жестко присоединен кронштейн 6, К пocлeднe ry болтами 45 прикреплена пластина 46, которая одной своей стороной жестко связана с наружной секцией 33 корпуса 28, а к другой стороне приварен клеммный зажим 47, охватывающий секцию 34 штанги 28.. Клеммньм зажим 47 стягивается болтом 48. На задней стенке кузова транспортного средства 1 (фиг.З) выполнены крепежнье отверстия 49 для установки кронштейна 6 (фиг.1-3), а вместе с ним и направляющего механизма 7 в разные положения. Каждый блок 31 и 32. (фиг.2 и 4) состоит из шкива 50 (фиг.4) в центральном отверстии которого установлены подшипники 51 качения, напрессованные на ось 52, жестко связанную с кронштейном 30. Подшипники 51 качения фиксируются на оси 52 гайкой 53. С торцов осевое отверстие шк1тва 50 закрыто крышками 54 и 55. В осевом отверстии крьшки 55 установлен сальник 56. Каждый фиксатор 39 и 40 (фиг.2 и 4) состоит из корпуса 57 (фиг.4), на котором установлен -ролик 58. Внутри корпуса 57 установлен стержень 59 с пружиной 60 и рукояткой 61. Стержень 59 удерживается в корпусе 57 колпачковой гайкой 62. Корпус 57 установлен на оси 63 с йозможностью его поворота вокруг этой оси и удерживается на ней стопорным кольцом 64.. В кронштейне 30 выполнено отверстие 65 для захода в него заостренной нижней части стержня 59. Оси 37 и 38 (фиг.2 и 4) удерживаются от выпадания из серег 35 и 36 планками 66, размещенными в пазах 67. Планки 66 крепятся к проушинам 35 и 36 болтами 68. Устройство дпя подборки сейсмических кос работает следующим образом. Транспортное средство устанавлива ется над концом сейсмической косы 23 или рядом с ним. Подъемный мег.анизм 24 устанавливается таким образом, чтобы опорный 25 и направляющие 26 ролики находились в вертикальном угле видимости через лобовое стекло Направляющий механизм 7 устанавли вается в вертикальном положении. Вручную с одной стороны подборомного механизма А освобождают оси 13 и 14 и на последних установленнькс с противоположной стороны, поворачивают при)шмной механизм 15, Конец сейсмической косы 23 укладывают на боковую поверхность ведущего барабан 9. После чего устанавливают прилчимной механизм 13 в исходное положение и фиксируют его в этом положении ося 13 и 14, Сейсмическая коса 23 роликами 20 и 21 установленными на балансирной тележке 17о и прижимом 19 прижи:.ае ся к боковой поверхности ведущего барабана 9, после которого свободны конец сейсг-тческой косы 23 укладыва ся на направляющий ролик 11 и пропускается между роликами 12, конец сейсмической косы 23 заправлязот в блоки 31 и 32 Лля это .го рукояткой 6 1J, сжимая пружину 60-, стержень 59 перемещают в осевок яаправлении до тех пор, пока его заостренный конец е выйдет из отверс тия 65 к 5онгатейна 30, .Колпачковаи гайка 62 воспринимает усилие пру ;ины 60, Фиксатор 40 вместе с его роликом 58 и корпусом 57 на оси 63 поворачивают в сторону и сейсмическую косу 23 вводят в ручей шкива 50, затем фиксатор 40 устанавливают в исходное положение. Стопорное кольцо 64 удерживает фиксатор 40 на оси 63. Аналогично поворачивают фиксатор 39 и сейсмическую косу 23 вводят в ручей блока 3, Фиксатор 39 устанавливают в исходное положение. Затем сейсмическую косу 23 укладывают на направляющий ролик 22. После заправки конца сейсмической косы 23 в устройство для подборк сейсггических кос последнее начинает движение вдоль сейст-етческой косы 23, расположенной на сейсморазведочном профиле, и одновременно с помощью системы 2 управления включают ириводной двигатель 10, который прив дит но барабан 9. Последний начинает вращаться по часовой стрелке и за счет фрикционных сил увлекает за собой сейсмическую косу 23 и подает ее в кузов транспортного средства 1 / Балансирная тележка 17 шарнирно связанная с рычагом 18, который вторьм своим концом щарнирно связан с корпусом 16, прижимом 19 обеспечивает необходимое усилие прижима сейсмической косы 23 роликами 20 и 21 к ведущему барабану 9. Ролики 25 и 26 подъемного механизма 24J направляющий ролик 22, а также самоустанавливающиеся блоки 31 и 32 обеспечивают направление сейсмической кос,1 в подборочный механизм 4-, который и укладывает ее в кузов транспортного средства 1, Кронштейны 3 и рама 8 обеспечивают надежное крепление подборочного механизма 4 к кузову транспортного средства. Корпус направляюп1его механизма 7 вгзшолнен в виде телескопической штанги 28, позволяющей относительное перемещение его секций 33 и 34 и регулирующей положение блока 32, исключающим контакт сейсмическЪй косы 23 по кузову транспортного средства 1 . Для регулировки необходимо отвернуть болт 48 с клеммного зажима 47. Последний разжимается и освобождает секцию 34, которую выдвигают на требуем то величину и фиксируют в этом положении клеммным зажимом 47, При перемещении сейсмической косы 23 по блокам 31 и 32 их пживы 50 за счет подшипников 51 вращаются на осях 52 с достаточно малым усилием. Крьшвки 54 и 55, а также сальник 56 исключают загрязнение подшипников 51 качения. Гайка 53 удерживает шкив 50 на оси 52, Блок 31 своим кронштейном 29 и осью 37 шарнирно связан с проушиной 35, а блок 32 своим кронштейном 30 и осью 38 шарнирно связан с проушиной 36. Проушины 35 и 36 жестко соединены с ceкпия ш 33 и 34 корпуса 28. Почанки 66 расположенные в пазах 67 и соединенные с проушинами 36 и 37 болтами 68 фиксируют оси 37 и 38 в рабочем положении. Оси 37 и 38 расположены на одной лин-ии, совпадающей с осью сейсмичес/1кой косы 23, расположенной между бло ками 31 и 32, что обеспечивает самоустановку блоков 31 и 32 по сейсмической косе 23. Прикрепленная к наружной сек1ши 33 штанги 28 серьга 41, шарнирно уст новлена на оси 42 и позволяет осущес влять поворот направляющего механизм 7 вокруг оси 42. Ось 42 жестко связана с кронштейном 5, который болтами 43 жестко свя зан с задней стенкой кузова транспор ного средства 1, Фиксация направляющего механизма 7 в разных положениях осуществляется кронштейном 6, который болтами 45 соединен с пластиной 46. Последняя в свою очередь жестко соединена с наружной секцией 33 штан ги 28. В задней стенке кузова транспортного средства 1 на одинаковом рассто нии от оси 42 выполнены резьбовые отверстия 49 позволяющие винтами 44 устанавливать направляющий механизм 7 в разных положениях. Количество положений направляющего механизма 7 зависит от количества выполненных резьбовых отверстий 49. Скорость подборки сейсмической косы 23 синхронизируется вручную one ратором устройства с движением транс портного средства с помощью системы 2 управления. Для раскладки сейсмической косы 23 на сейсморазведочном профиле на- правляющий механизм 7 устанавливают в разные положения (фиг.З). Если требуется раскладка сейсмиче кой косы 23 справа, то направляющий механизм 7 устанавливают в горизон тальном положении; если требуется ра кладка сейсмической косы 23 слева по ходу движения транспортного средства 1, то направляющий механизм 7 повора чивают на 180° по отношению к показанному на фиг.З если требуется раскладка сейсмической косы 23 по оси транспортного средства 1, то направляющий механизм 7 устанавливают вертикально вниз, если требуется раскладка сейсмической косы 23 в промежуточном положении, то направляюш 1й механизм 7 закрепляется на за ней стенке транспортного средства 1 в соответствующем положении. Для установки направляющего механизма 7 (фиг.1-3) отворачивают винты 44 освобождают кронштейн 6, устанав7ливают направляющий механизм 7 в требуемое положение и в этом положении винтами 44 закрепляют кронштейн б. Винты 44 вворачивают через крепежные отверстия кронштейна 6 в резьбовые отверстия 49 выполненные на задней стенк.е кузова транспортного средства 1. Направляющий механизм 7 поворачивается вокруг оси 42. После установки направляющего механизма 7 в требуемое положениеотворачивают болт 48 освобождают секцию 34 и, перемещая ее, устанавливают блок 32 в требуемое поло- жение. Поело установки блока 32 завинчивают болт 48, зажимая клем1- ное соединение 47, которое фиксирует секцию 34 в этом положении. Транспортное средство 1 начинает движение вдоль сейст-п1ческ:ого профиля, одиовреме1ню с началом движения системой 2 управления включают приводной двигатель 10. Последний начинает вращаться в противоположную сторону (против часовой стрелки) и вместе с враи,ается ведущш 6apf46aH 9 и прижатые к его боковой поверхности ролики 20 и 21. Зажатая eждy ролика: И 20 и 21 и боковой поверхностью ведущего барабана 9 сейсмическая коса 23 за счет связи увлекается и подается через направляющий механизм 7 на сейсморазведочный профиль. Возможно и непосредственное вытягивание сейсмической косы 23 через свободно вращающиеся ролики 20 и 21, ведущий барабан 9 и блоки 31 и 32 направляющего механизма 7 при движении транспортного средства 1. При этом конец сейсиической косы 23 предварительно закрепляется на сейсморазпедочном профиле. Предлагаемая конструкция устройства для подборки сейсмических кос позволяет осуществлять подборку сейсмической косы сбоку транспортного средства 1, при этом направляющий механизм 7 устанавливается горизонтально (фиг.З). Таким образом, выполнение корпуса направляющего механизма в виде телескопической штанги и снабжение его шарнирно закреапенньп и на его концах кронштейнами с блоками позволяет регулировать расстояние между блоами и обеспечивать раскладку сейсмит
ческой косы как за колеей транспортного средства, так и в ней.
Связь иаружной секиии корпуса направляющего механизма с задней стенкой кузова транспортного средства с возможностью фиксированного поворота направляющего механизма D плоскости, перпендикулярной продольной оси устройства, позволяет направляющий механизм устанавливать в положениях, позволяющих осуществлять прием сейсмической косы как с боков кузова транспортного средств за его шириной, так и в пределах его ширины. Данная связь позволяет также осуществлять раскладку сейсмической косы на сейсморазведочный профиль как в колее устройства, так я за ее пределами.
Данное преимущество позволяет производить сейсморазведку любыми
источниками сейсмических сигналов и на любой местности, где возможен проезд транспортньк средств, что значительно расширяет эксплуатационные возможности предлагаемого устройства.
Технико-экономическая эффективность устройства для подборки сейсмических кос определяется расширением их эксплуатационных возможностей, т.е. обеспечиванием раскладки и подборки сейсмических кос по всей ширине профиля в зависимости от вида иЬточников сейсмических сигналов, что исключает ручные переносы кос по иирине профиля. Исключение ручных работ сокращает количество обслуживаю1цего персонала -.и повьшает производительность сейсморазведо.чных работ .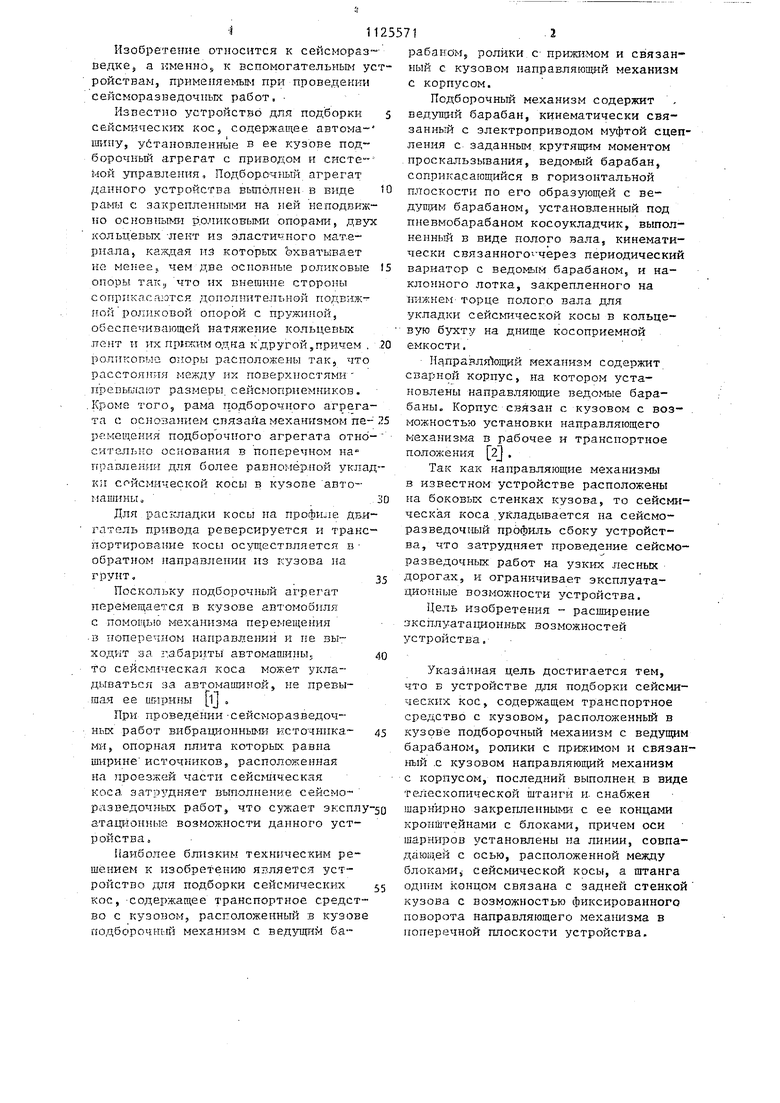
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подборки сейсмических кос | 1983 |
|
SU1117549A1 |
| Устройство для подборки сейсмических кос | 1983 |
|
SU1140075A1 |
| УСТРОЙСТВО ДЛЯ ПОДБОРКИ СЕЙСМИЧЕСКИХ КОС | 1993 |
|
RU2054701C1 |
| Устройство для подборки сейсмических кос | 1983 |
|
SU1163291A1 |
| Устройство для подборки сейсмических кос | 1983 |
|
SU1081586A1 |
| Устройство для подборки сейсмических кос | 1988 |
|
SU1805421A1 |
| СМОТОЧНО-РАЗМОТОЧНОЕ УСТРОЙСТВО | 1991 |
|
RU2018881C1 |
| Установка для подборки сейсмических кос | 1984 |
|
SU1193617A1 |
| Устройство для подборки сейсмических кос | 1988 |
|
SU1631480A1 |
| Установка для подборки сейсмических кос | 1984 |
|
SU1200214A1 |
УСТРОЙСТВО ДЛЯ ПОДГОРКИ СЕЙСМИЧЕСКИХ КОС, содержащее транспортное средство с кузовом, расположенный в кузове подборочный механи М с ведущим барабаном, ролики с прижимом и связанный с кузовом направляющий механизм с корпусом, отличающееся тем, что, с целью расширения эксплуатационных возможностей корпус выполнен в виде телескопической штанги и снабжен шарнирно связанными с ее концами кронштейнаьш с блоками, причем штанга одним концом связана с задней стенкой кузова с возмозкностью фиксированного поворота направляющего механизма в поперечной штоскости устройства. (/) (ри,г.1 25 2S
ВидА
,х
X
X
X
+ -f
X
9
/7// . //X/ /X
фиг.З
V У//// ///
б б
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для подборки сейсмических кос | 1977 |
|
SU693295A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| НПО Нефтегеофизика Министерства геологии СССР, Новосибирск, 1980, с.3-5 (прототип) | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
