(21)426Д789/24 24
(22)23.06.87
(46)30.11.88. Бюл. № 44 .
(75)Г.Е.Коновалов
(53)681.3.071(088.8)
(56)Авторское свидетельство СССР № 744713, кл. G 09 В 9/00, 1978.
(54)УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ СИСТЕМ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА
(57)Изобретение относится к автоматике и вычислительной технике, в частности к техническим средствам обучения, и может быть использовано для обучения и тренировки операторов навыкам по ремонту модульных систем управления автоматизированного электропривода постоянного тока. Целью изобретения является расширение дидактических возможностей устройства. Устройство содержит пульт оператора 1 со сменными модулями, блок задания программы 3 обучения, кольцевые сдвигающие регистры 7, дегаиф ратор 8, элементы И 9,ИЛИ 12,блок оценок 10,блок ввода ответов 11, блок имитаторов 13 электрооборудования, содержащий модели тиристорных преобразователей и модель электродвигателя. Блок имитаторов силового электрооборудования подключается на пульте оператора к проверяемой системе регулирования в виде сменных модулей вместо реального силового электрооборудования. Оператор обнаруживает неисправные модули, введенные преподавателем, и определя-S ет совокупность модулей, подлежащих /Л
замене, и оптимальную очередность их замены. 6 ил.
I
00
Изобретение относится к автоматик и вычислительной технике, в частност к техническим средствам обучения, и может быть использовано для обучения и тренировки операторов навыкам по ремонту модульных систем управления автоматизированного электропривода постоянного тока.
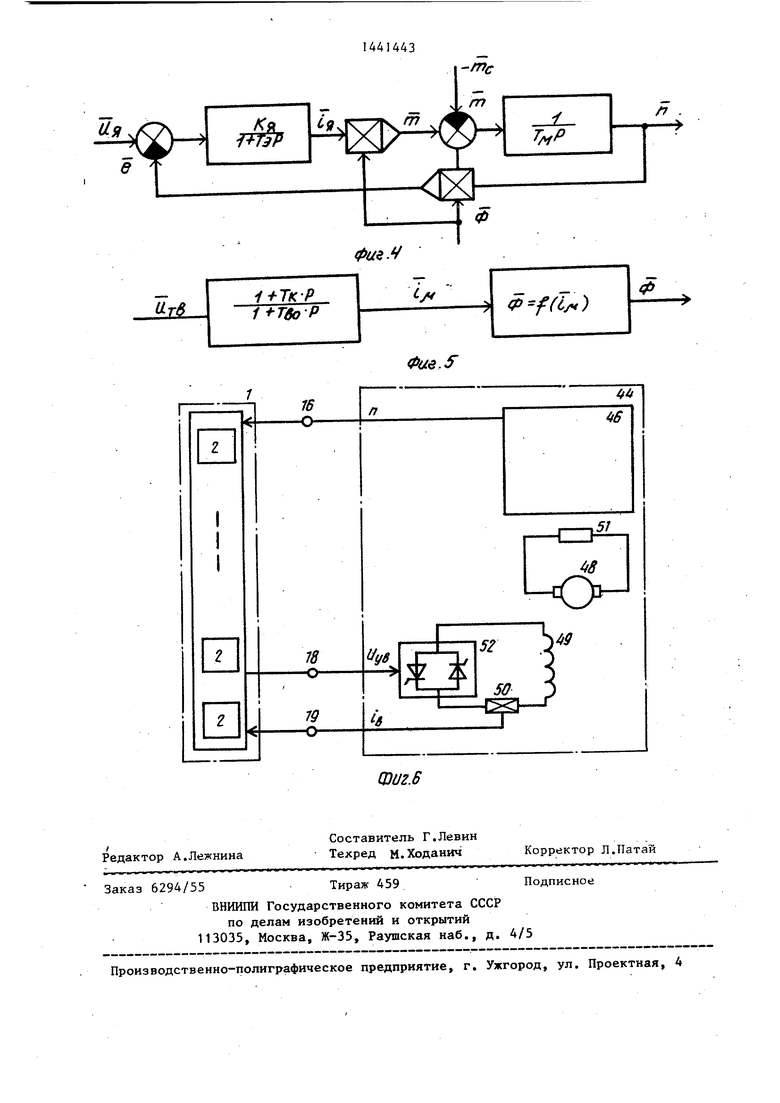
Цель изобретения - расширение дидактических возможностей устройства, На фиг. 1 и 2 изображена функциональная схема устройства для обучения операторов систем управления; на фиг, 3 - функциональная схема регулирования скорости автоматизированного электропривода постоянного тока; на фиг, 4 и 5 - структурные схемы якорной цепи и цепи возбуждения электродвигателя; на фиг, 6 -.функциональная , схема, регулирования скорости динамического торможения автоматизированного электропривода постоянного тока.
Устройство содержит (фиг, 1) пульт- 1 оператора со сменными модулями 2, блок 3 задания программы обучения, одноименные разряды 4, 5 и 6 регистров 7, дешифратор 8, элементы И 9, блок 10 оценок, блок 11 ввода ответов, элементы ШШ 12, блок 13 имитаторов электрооборудования, выход 14 пульта оператора, входы 15-17 пульта оператора, вход 18 блока ими- таторов-и выход 19 блока имитаторов. Блок 13 имитаторов (фиг, 2) электрооборудования содержит узлы моделирования якорной цепи электродвигателя 20, цепи возбуждения электродвигателя 21 и электродвигателя 22, Узлы 20 и 21 моделирования содержат инверторы 23 и 24 с перемещенными резисторами в -цепи обратной связи и сумматоры 25 и 26, Узел 22 моделирования электродвигателя содержит первый сумматор 27 с переменным резистором в цепи обратной связи, первый интегратор 28, первый инвертор 29, второй инвертор 30 с переменным резистором в цепи обратной связи, первое множительное устройство 31, второй сумматор 32 с переменным резистором в цепи обратной связи, второй интегратор 33, третий сумматор 34 с переменным резистором в цепи обратной связи, операционный усилитель |35, имеющий в цепи обратной связи последовательно включенные резистор и конденсатор, третий инвертор 36,
0
5
0
5
0
5
0
5
0
5
функциональный преобразователь 37, второе множительное устройство 38, разделительные диоды 39 и 40, четвертый и пятый инверторы 41 и 42 с переменными резисторами в цепях обратных связей.
Блок 13 имитаторов содержит также переключатель 43 режимов работы,
I BjfoK 44 силового электрооборудования (фиг.З) с одержит шунт 45, тахо- генератор 46, делитель 47, якорь 48, обмотку 49 возбуждения, шунт 50 и тиристорные преобразователи 51 и 52.
Устройство работает следующим образом.
На пульте 1 оператора устанавливаются блоки со сменными модулями 2 системы управления автоматизированного электропривода постоянного тока.
Вместо реального блока 44 силового электрооборудования (силовой исполнительный электродвигатель постоянного тока независимого возбуждения, имеющий якорь 48 и обмотку 49 возбуждения, тиристорный преобразователь 51 якорной цепи и тиристорный преобразователь 52 цепи возбуждения) к блоку 1 со сменными модулями 2 к входам-выходам 14 - 19 подключены обратные связи по току якоря i 5, и току возбуждения i g соответственно с щун- тов 45 и 50, обратная связь по напряжению U-fj, с делителя 47 из активных резисторов, обратная связь по скорости п от тахогенератора 46 и уп- равля щие напряжения и соответственно тиристорного преобразователя 51 якорной цепи и тиристорного преобразователя 52 цепи возбуждения блока 13 имитаторов (фиг,1) электрооборудования. После этого система управления автоматизированного электропривода начинает функционировать так же, .как и с реальным силовым электрооборудованием, и можно, задавая неисправности в сменных модулях, обучать и оценивать знания операторов и наладчиков систем управления автоматизированного электропривода в поиске и замене неисправных модулей.
Перед началом работы преподаватель вводит в состав блока 1 несколько неисправных модулей и коды этих модулей вводит в блок 3, представляющий клавиатуру общей емкости от О до 99 кодов с преобразованием десятичных кодов в параллельные дво-
3lA
ичные. На выходе блокя 3 формируются параллельные коды неисправных моду-лей , которые должны быть заменены оператором в процессе поиска неис- правностей. Эти коды через группы выходов блока 3 задания программы поступают на входы одноименных разря дов А,5 и 6 регистров 7.
Каждая совокупность одноименных разрядов регистров 7 образует регистр, который хранит код одного модуля, а последовательности размещения кодов модулей в разрядах 4,5 и 6 соответ ствует оптимальной последовательности их замены при поиске неисправности. При этом в последних разрядах 6 размещается код модуля, который должен заменяться первым, а в первых разрядах 4 - код модуля, который должен заменяться последним. С выходов последних разрядов 6 код модуля, заменя емого первым, поступает на дешифратор 8. При этом на соответствуюсцем выходе дешифратора 8 формируется сигнал, поступающий на один из входов соответствующего Элемента И 9. Одновременно блок 3 выдает в блок 10 оценки код числа, соответствующего оптимальному числу модулей, подлежащих замене при определении неисправных модулей,
В процессе выполнения задания оператор на пульте I обнаруживает функциональные признаки неисправности, введенной преподавателем, определеяет совокупность модулей, подлежапшх .замене, и оптимальную очередность их Ьамены.
При определении первого модуля из блока 2 сменных модулей, который он считает неисправным, оператор с пульта вводит код этого модуля нажатием соответствующих кнопок блока П. В случае, если оператор верно определил последовательность замены модулей и замененный им первый модуль соответствует модулю, заменяемому первым при оптимальном поиске неисправности, на входах соответствующего элемента И 9 сигналы с выходов дешифратора 8 и блока 11 совпадают. При этом в блок 10 оценок выдается сигнал совпадения кодов. В случае, если замененный модуль не соответствует модулю, заменяемому первым, совпадение сигналов на входах элементов И 9 не происходит и в блок 10 оценок сигнал совпадения не поступает. Одновременно сигнал с выхода блока 11 оценок
4434
через элемент ШШ 12 поступает в блок 10 оценок, в котором производится подсчет числа замененных оператором модулей, и на сдвнгаюиц1е входы регистров 7. При этом коды модулей, записанных в одноименных разрядах регис тров 7, сдвигаются в последующие разряды, на-- пример из разрядов 4 в разряды 5,
Q причем из последних разрядов 6 - в первые разряды 4, что обеспечивает сохранение программы поиска неисправ- нрсти. После первого сдвига, соответствующего первой замене, в разря-
5 дзх 6 находится код модуля, который долже й заменяться вторым.
При замене оператором очередного модуля описанный процесс повторяется. В процессе поиска неисправности в
0 блок 10 оценок поступают сигналы числа замененных оператором модулей.с выхода элемента ИЛИ 12, сигналы совпа дений очередности замены модулей с выходов элементов И 9 и код оптималь-
5 ного числа заменяемых модулей с группы выходов блока 3 задания программы. Блок ответов, представляющий клави атуру с преобразованием десятичного кода в параллельный, аналогично блоку
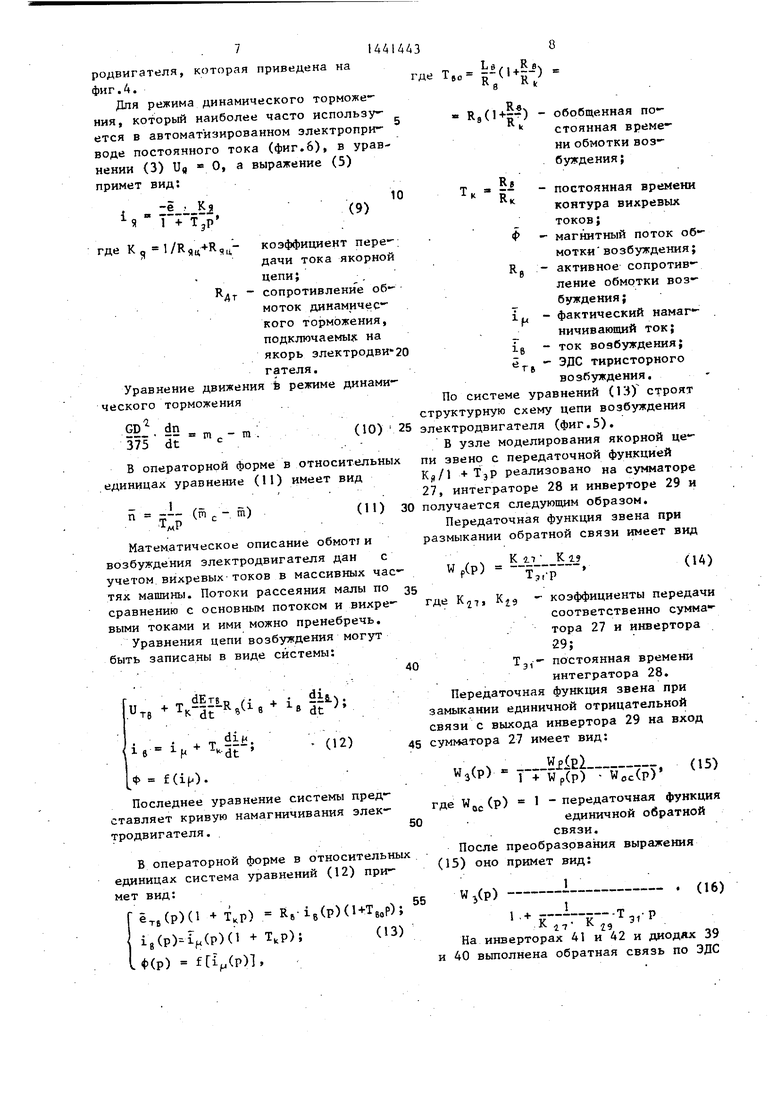
0 программы и набору схем совпадения И, ИЛИ различных комбинаций количества заданных неисправных модулей и количества правильно замененных модулей выдает визуальный сигнал оценки в цифровой форме по пятибальной систе - ме согласно таблице оценок нахождения неисправностей, в момент совпаде - ния количества заданных преподавателем в блок программы неисправных
0 модулей и количества замененных моду- лей оператором в процессе поиска неисправностей.
Блок имитаторов (фиг.2) силового электрооборудования предназначен для
с имитации всех возможных статистических и динамических режимов работы силовой части электрооборудования.
Математическое описание блока имитаторов силового электрооборудования,
Q в состав которого входят математичес - кие модели тиристорных преобразователей якорной цепи и цепи возбуждения и математическая модель электродвигателя, представлено следуюш им
c образом.
Выходные напряжения моделей тирис- торных преоб разователей якорной цепи и цепи возбуждения Ur и UTB пропорциональны выходным напряжением реаль-
ных тиристорных преобразователей со- гласно выражениям:
т,
и Т. де и
тя тя
ТЯ ЕТЙ
UT,. ЕТВ
- 1
( 5
Tв
(О
тя
те
выходные напряжения , и ЭДС тиристорных преобразователей; токи якоря и возбуждения;
внутренние активные сопротивления тиристорных преобразователей;
внутренние падения напряжения тиристорных преобразователей. передачи тиристорных й определяется из выра
Eli, V,,
те
Его
live
(2)
где Us,,, и
V8
управляющие напряжения на выходе тиристорных преобразователей.
Внутреннее падение напряжения тири сторных преобразователей имитируется путем введения отрица тельной обратной связи по напряжению на вход сумматоро 25 и 26 ,пропоргщонально соответственн токам якоря и возбуждения.
Выходное напряжение модели тирис- торного преобразователя якорной цепи ч ерез замкнутый контакт переключателя 43 поступает иа вход узла моделирования якорной цепи электродвигателя, состояний из сумматоров 27 и .32, интеграторов 28 и 33, инверторов 29, 30, 41 и 42, множительных устройств 31 и 38 и диодов 39 и 40.
Выходное напряжение узла моделирования тиристорного преобразователя возбуждения поступает на узел моделирования обмотки возбуждения электродвигателя, состоящий из сумматора 34, операционного усилителя 35 с последовательно соединенными резистором и конденсатором в цепи обратной связи инвертора 36 и функционального преобразователя 37.
Уравнение якорной цепи имеет следу
ющий вид:
С„ Фп + L.Jr - + ..
и
(3)
электродвигателя; поток электродвн
5
где Uj, - напряжение на якоре электродвигателя;постоянная магнитный гателя;
число оборотов электродвигателя;
индуктивность якорной цепи; активное сопротивление якорной цепи. Запишем уравнение (3) в относительных единицах, принимая за базовые величины номинальные значения переменных
Се - Ф , «ц
и
п +
1Ча
и; заг--
где Tj
LJ3 ,
К,
Ч4
электромагнитная постоянная времени якорной
цепи;
коэффициент передачи якорной цепи.
Преобразуем уравнение (4) к операторной форме
где
.-(и, - ё).
(5)
Я ТТтГр .
ё и - ЭДС электродвигателя. Уравнение движения электродвигателя имеет вид
dn dt
ш т.
(6)
где GD
0
m
5
маховый момент электродвигателя, приведенный к валу;
движущий момент электродвигателя;
конструктивный коэффициент пропорциональности; момент сопротивления.
единицах уравнение
пр
СмИл В относительных (6) примет вид:
г
Ф га.
(7)
5
0
С учетом соотношения m
н
CM- Hгде Ф,
,т
н
00%
375 т
IMI
- номинальные величины потока, момента и тока якоря электродвигателя, Пн
(8)
где m
°
Ч
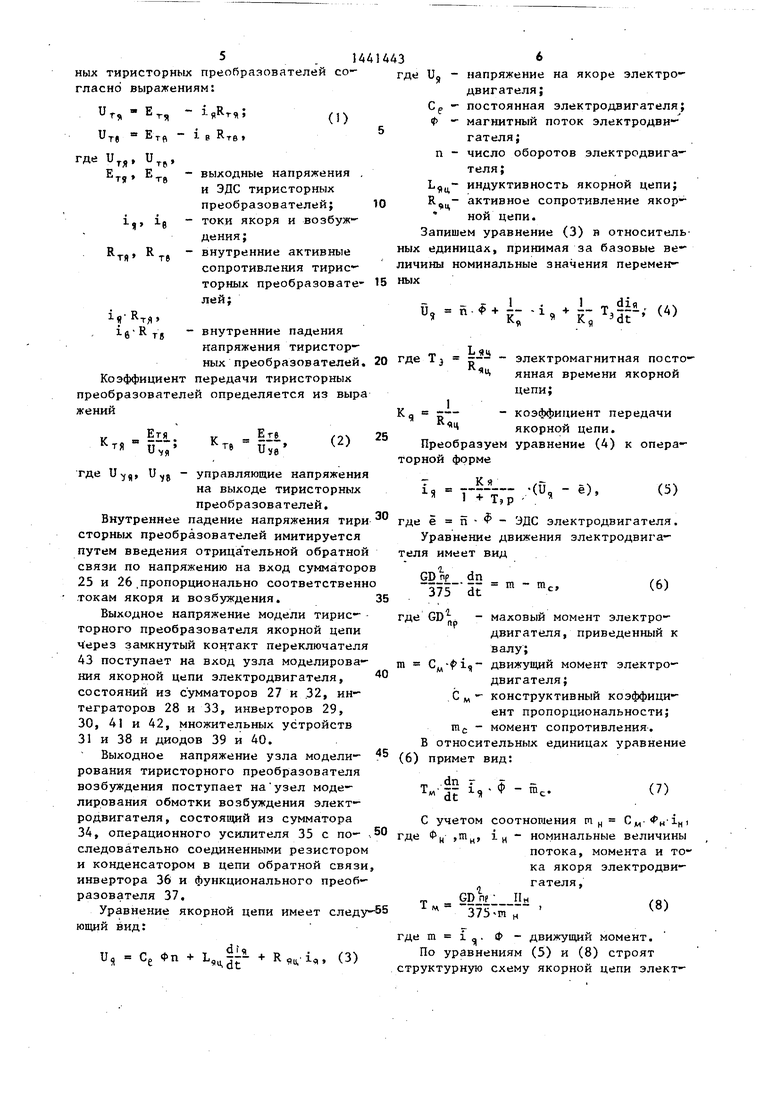
d - движущий момент, уравнениям (5) и (8) строят структурную схему якорной цепи электродвигателя, которая приведена на фиг.4.
Для режима динамического торможения, который наиболее часто используется в автоматизированном электроприводе постоянного тока (фиг.6), в уравнении (3) Ufl О, а выражение (5) примет вид:
де К ,,
.Kj
1 + Tjp
.(9)
10
Мт
коэффициент пере-; дачи тока якорной цепи;
сопротивлени е обмоток динамичес кого торможения, подключаемых на якорь злектродви 20 гателя.
Уравнение движения Ь режиме динамиеского торможения
(10) 25
GD 375
dn dt
ш - m .
В операторной форме в относительных единицах уравнение (11) имеет вид
. (И) 3
-1- (и , - fn)
Передаточная функция звена при размыкании обратной связи имеет вид
(14)
Математическое описание обмотт и возбуждения электродвигателя дан с учетом вихревых-токов в массивных частях машины. Потоки рассеяния малы по 35 сравнению с основным потоком и вихре- где К, Kjg - коэффициенты передачи выми токами и ими можно пренебречь.
,. К 1Т К 19
соответственно сумма тора 27 и инвертора 29; Т,,- постоянная времени
Уравнения цепи возбуждения могут быть записаны в виде системы:
14ДЗ
где TBO
О
к
Re(i) обобщенная постоянная времени обмотки возбуждения;
0
R
RK
;
0
постоянная времени контура вихревых токов;
Ф - магнитный поток обмотки возбуждения; Rg - активное сопротивление обмотки возбуждения;i,, - фактический намаг
ничивающий ток; ig - ток возбуждения; - ЭДС тиристорного
возбуждения.
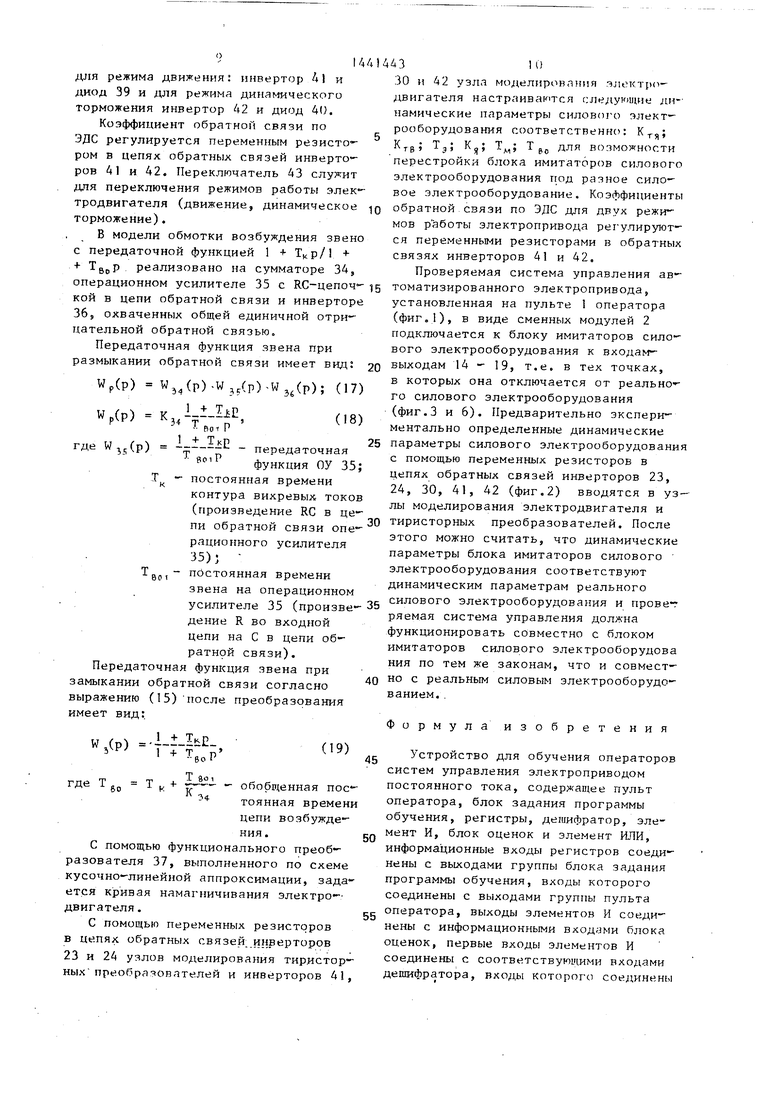
По системе уравнений (13) строят структурную схему цепи возбуждения 5 электродвигателя (фиг.5).
В узле моделирования якорной цепи звено с передаточной функцией KO/I « ТэР реализовано на сумматоре 27, интеграторе 28 и инверторе 29 и 0 получается следующим образом.
Передаточная функция звена при размыкании обратной связи имеет вид
5где К, Kjg - коэффициенты передачи
(14)
К, Kjg - коэффициенты передачи
,. К 1Т К 19
К, Kjg - коэффициенты передачи
соответственно сумма тора 27 и инвертора 29; Т,,- постоянная времени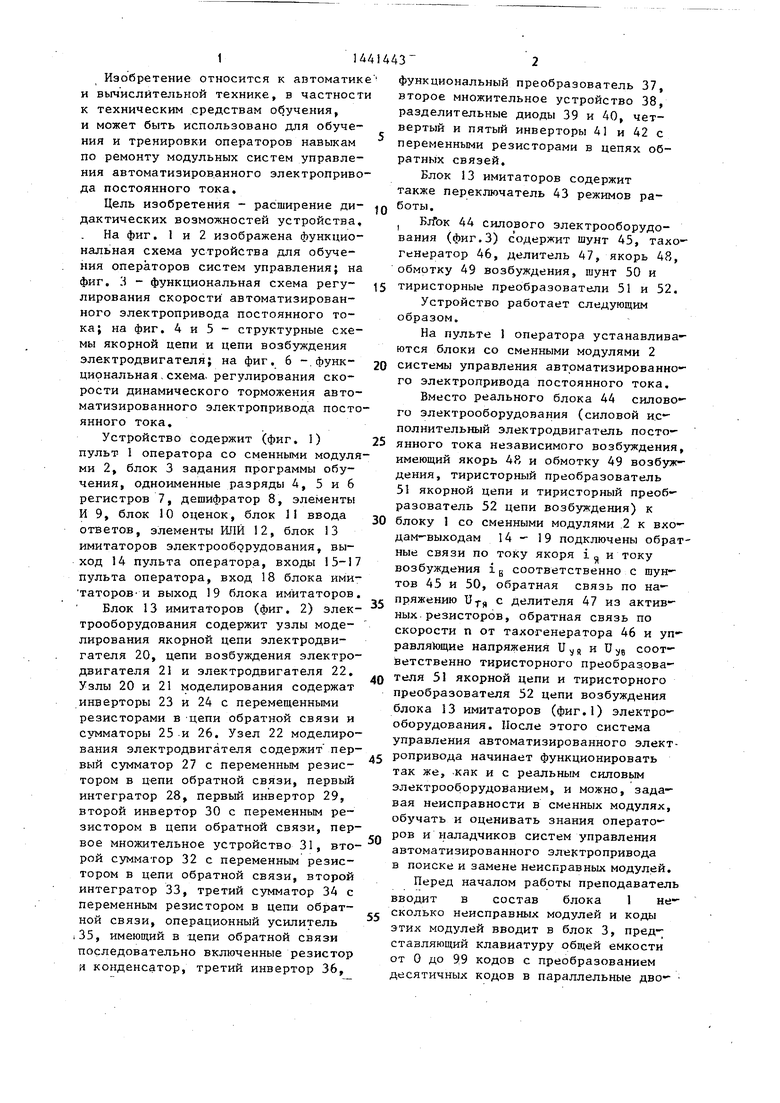


| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2003 |
|
RU2254617C2 |
| Электропривод | 1985 |
|
SU1307522A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ГЛАВНОГО ДВИЖЕНИЯ ЭКСКАВАТОРА | 2005 |
|
RU2288997C1 |
| МОДЕЛИРУЮЩИЙ КОАП | 2013 |
|
RU2516703C1 |
| СПОСОБ ТЕХНИЧЕСКОГО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ПОДДЕРЖКОЙ ПРИНЯТИЯ РЕШЕНИЙ И КОМПЛЕКС КОНТРОЛЬНО-ПРОВЕРОЧНОЙ АППАРАТУРЫ С ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2557771C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| Тренажер оператора автоматизированных систем управления | 1982 |
|
SU1132302A1 |
| УСТРОЙСТВО, ИМИТИРУЮЩЕЕ ЭЛЕКТРОННЫМ СПОСОБОМ БЕСКОНТАКТНЫЙ СИНХРОННЫЙ ГЕНЕРАТОР, И СТЕНД ПРОВЕРКИ И НАСТРОЙКИ БЛОКОВ РЕГУЛИРОВАНИЯ, ЗАЩИТЫ И УПРАВЛЕНИЯ | 2018 |
|
RU2710956C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| Электропривод постоянного тока с двухзонным регулированием скорости валков клети прокатного стана | 1986 |
|
SU1411911A1 |


tt 4. т г, UTB T - --RgU
+ i -iS-N. в в dt
IB
Ф f (i).
i + т М - dt
Последнее уравнение системы представляет кривую намагничивания электродвигателя.
В операторной форме в относительных единицах система уравнений (12) примет вид:
(p)(l + Т,р) Кб-1в(р)(1+Тв„р); ig(p)--i(p)0 + Т,р); (13) ф(р) (p)l,
интегратора 28.
Передаточная функция звена при замыкании единичной отрицательной связи с выхода инвертора 29 на вход 45 сум атора 27 имеет вид:
W.(p)
3VH/ - )
где (p)
WOC(P)
(15)
0
1 - передаточная функция
единичной обратной связи.
После преобразования выражения (15) оно примет вид:
55
W3(p)
(16)
1 ,+
у
К К jg J1
На инверторах 41 и 42 и диодях 39 40 выполнена обратная связь по ЭДС
I г /
14
для режима движения: инвертор Д1 и диод 39 и для режима динамического торможения инвертор 42 и диод 4(}.
Коэффициент обратной связи по ЭДС регулируется переменным резисто- ром в цепях обратных связей инверторов ft и 42. Переключатель 43 служит для переключения режимов работы элек тродвигателя (движение, динамическое -JQ торможение).
В модели обмотки возбуждения звено с передаточной функцией 1 + + + Tgpp реализовано на сумматоре 34,
443И)
30 и 42 узла моделировлиил злоктро двигателя настраиваются следующие намические параметры силового элек рооборудования соответственно: К,-, KTB Kj,; Т,; Т (, для возможнос перестройки блока имитаторов силов электрооборудования под разное сил вое электрооборудование. Коэффицие обратной.связи по ЭДС для двух реж мов работы электропривода рег улиру ся переменными резисторами в обрат связях инверторов 41 и 42,
Проверяемая система управления
операционном усилителе 35 с RC-цепоч--15 томатизированного электропривода,
кой в цепи обратной связи и инверторе 36, охваченных общей единичной отрицательной обратной связью.
Передаточная функция звена при размыкании обратной связи имеет вид:
Wp(p) W3jp)-W,,(p)W3(p); (17)
(18)
w,(p) K3,
де W ,.(p)
R01 P
T so,P
25
30
передаточная функция ОУ 35; постоянная времени контура вихревых токов (произведение RC в цепи обратной связи операционного усилителя 35); постоянная времени звена на операционном усилителе 35 (произве- 35 дение R во входной цепи на С в цепи об- ратнрй связи).
Передаточная функция звена при амыкании обратной связи согласно ыражению (15) после преобразования
во t
40
(19)
обобщенная постоянная времени цепи возбуждения.
С помощью функционального преобразователя 37, выполненного по схеме кусочно-линейной аппроксимации, задается кривая намагничивания электродвигателя.
С помощью переменных резисторов в цепях обратных связей инверторов 23 и 24 узлов моделирова}шя тиристор- ных преобразователей и инверторов 41,
43И)
30 и 42 узла моделировлиил злоктро двигателя настраиваются следующие динамические параметры силового электрооборудования соответственно: К,-,,; KTB Kj,; Т,; Т (, для возможности перестройки блока имитаторов силового электрооборудования под разное силовое электрооборудование. Коэффициенты обратной.связи по ЭДС для двух режимов работы электропривода рег улируют- ся переменными резисторами в обратных связях инверторов 41 и 42,
Проверяемая система управления ав0
5
0
5
0
установленная на пульте 1 оператора (фиг.1), в виде сменных модулей 2 подключается к блоку имитаторов силового электрооборудования к входам- выходам 14 - 19, т.е. в тех точках, в которых она отключается от реального силового электрооборудования (фиг.З и 6), Предварительно экспериментально определенные динамические параметры силового электрооборудования с помощью переменных резисторов в цепях обратных связей инверторов 23, 24, 30, 41, 42 (фиг.2) вводятся в узлы моделирования электродвигателя и тиристорных преобразователей. После этого можно считать, что динамические параметры блока имитаторов силового электрооборудования соответствуют динамическим параметрам реального силового электрооборудования и проверяемая система управления должна функционировать совместно с блоком имитаторов силового электрооборудова кия по тем же законам, что и совместно с реальным силовым электрооборудованием. .
Формула изобретения
Устройство для обучения операторов систем управления электроприводом постоянного тока, содержащее пульт оператора, блок задания программы обучения, регистры, дешифратор, элемент И, блок оценок и элемент ИЛИ, информационные входы регистров соединены с выходами группы блока задания программы обучения, входы которого соединены с выходами группы пульта оператора, выходы элементов И соеди- иены с информационньми входами блока оценок, первые входы элементов И соединены с соответствующими входами дешифратора, входы Которого соединен :
с выходами cooTBijTCTJfVHjpinx регистров, вход разрешения блока оценок с выходом блока задания программы обучения,, отличающееся тем, что, с целью расширения дидактических возможностей устройства, в него введены блок ввода ответов и блок имитаторов электрооборудования,
рого соединл н с BTopf.iM BXCVIOM узлп моделирования якорной цепи электро-- двигателя, второй выход узла модели- рования электродвигателя соединен с вторым входом узла моделирования цетти возбуждения электродвигателя и с вторым информационным входом пульта оператора, третий выход узла моделиро содержащий узел моделирования якорнойю вания электродвигателя соединен с цепи электродвигателя, узел моделиро- вторым входом переключателя, выход вания цепи возбуждения электродвигате которого соединен с третьим входом ля, узел моделирования электродвига- узла моделирования электродвигателя, теля и переключатель, первый вход четвертый выход которого соединен с которого соединен с выходом узла моде 15 третьим информационным входом пульта лирования якорной цепи электродвига- оператора, четвертый информационный i теля и с первым информационным входом пульта оператора, первый выход которого соединен с первым входом узла моделирования якорной цепи элёкт- 20 родвигателя, второй выход пульта оператора соединен с первым входом узла моделирования цепи возбуждения электродвигателя, выход которого соединен с первым входом узла моделирования 25 электродвигателя, первый выход котовход которого соединен с пятым выходом узла моделирования электродвигателя, а третий выход пульта оператора соединен с входом блока ввода ответов, выходы которого соединены с вторыми входами элементов И и с входами элемента ИЛИ, выход которого соединен со стробирующим входом блока оценок и входом сдвига регистров.
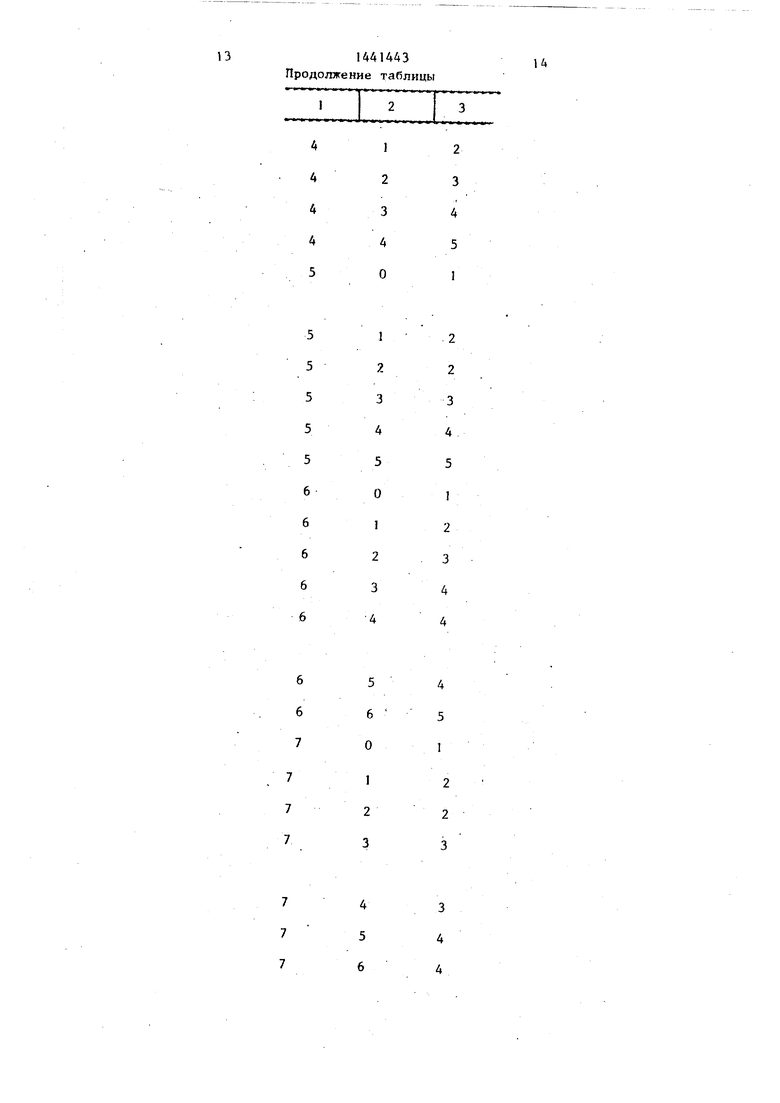
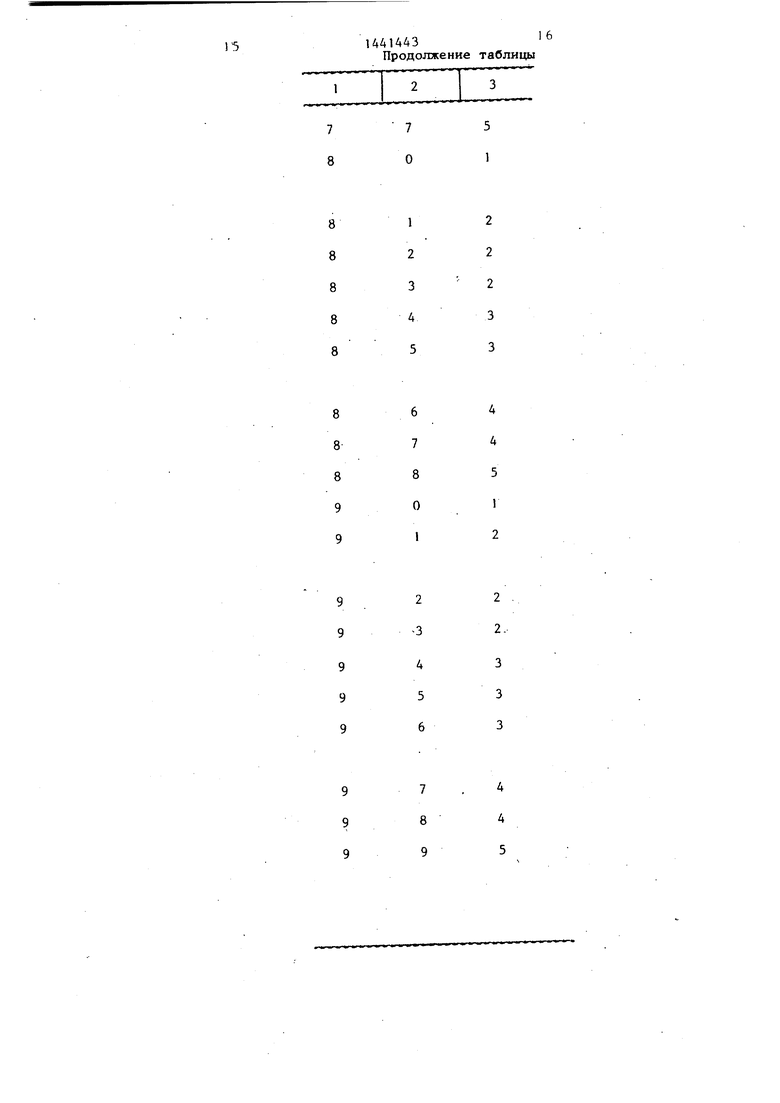
Таблица оценок нахождения неисправностей
рого соединл н с BTopf.iM BXCVIOM узлп моделирования якорной цепи электро-- двигателя, второй выход узла модели- рования электродвигателя соединен с вторым входом узла моделирования цетти возбуждения электродвигателя и с вторым информационным входом пульта оператора, третий выход узла моделиро вания электродвигателя соединен с вторым входом переключателя, выход которого соединен с третьим входом узла моделирования электродвигателя, четвертый выход которого соединен с третьим информационным входом пульта оператора, четвертый информационный i
вход которого соединен с пятым выходом узла моделирования электродвигателя, а третий выход пульта оператора соединен с входом блока ввода ответов, выходы которого соединены с вторыми входами элементов И и с входами элемента ИЛИ, выход которого соединен со стробирующим входом блока оценок и входом сдвига регистров.
1
О О 1 2
5 1 1
3 5
О 1 2 3
О
1
3
4 5 1
4 4 4 4 5
5 5 5 5 5 6 6 6 6 6
6 6 7
7 7 7
7 7 7
1 2 3 4 О
2 3
4 5 I
2 2 3
4 5 1
2 3 4 4
4 5 1
2 2
3
4 5 6
3 4 4
9 9 9 9 9
9 9 9
7 8
7 О
1 2 3
4 5
2
2 2 3 3
8 8 8 9 9
6 7 8 О 1
4 4 5 Г 2
2 -3 4 5 6
2 2.
3 3 3
7 8 9
4 4 5
If, О ig фгсг, 2
(гя 20 О /7
/7 .
Фи$,
(ftue.S
