Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока с питанием от автономных электроэнергетических систем переменного тока.
Целью изобретения является повышение надежности и производительности электропривода.
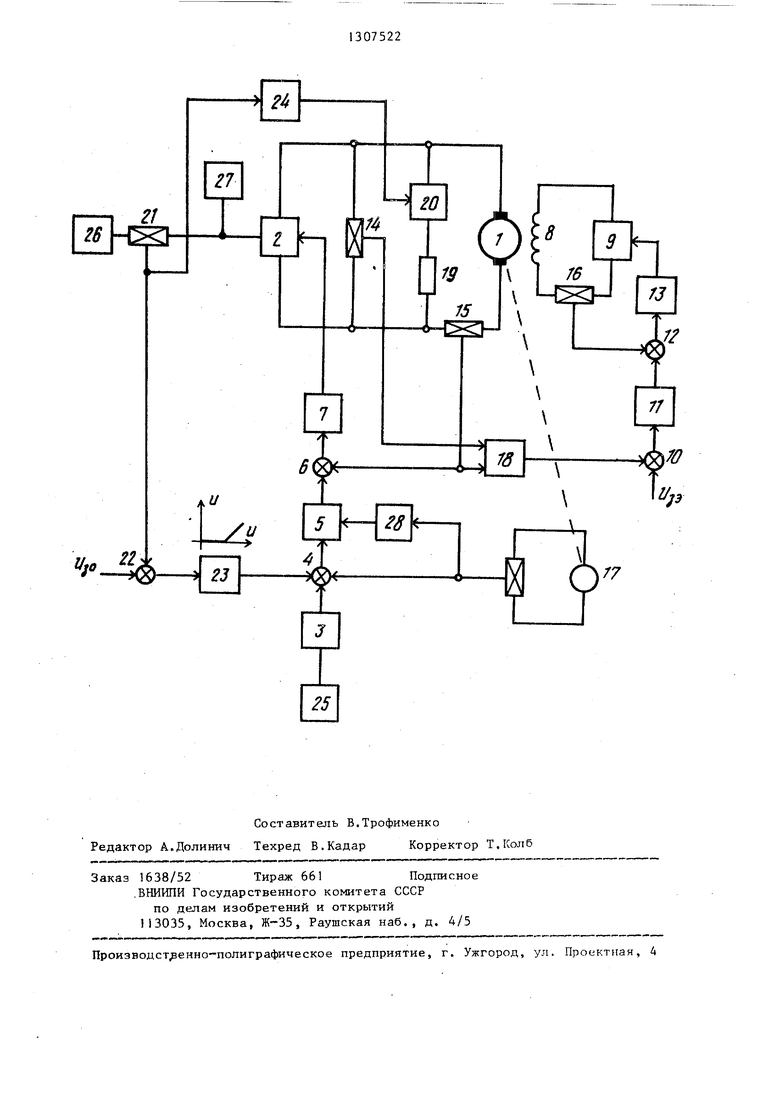
На чертеже приведена схема электропривода.
Электропривод содержит электродвигатель 1 постоянного тока, якорная обмотка которого подключена к вентильному преобразователю 2, последовательно соединенные задатчик 3 ин-15 тенсивности, первый узел 4 сравнения, регулятор 5 частоты вращения, второй узел 6 сравнения, регулятор 7 тока якоря i вход которого подключен к вхо10
полнительным входом регулятора частоты вращения.
Электропривод работает следующим образом.
Режим работы вентильного преобразователя 2 выпрямительный или инвер- торньш и работакщий комплект вентильного преобразователя определяется системой i регулирования электропривода и системой управления вентильного преобразователя автоматически в зависимости от заданного оператором направления перемещения груза и под действием сигналов обратных связей. Рассмотрим процесс опускания груза. При операциях опускания возможен как тормозной спуск с инвертором режимом при больших массах груза, так и силовой спуск с выпрямительным режимом
ду управления преобразователем 2 , второго комплекта вентильного преоб-..
мотка 8 возбуждения электродвигателя
Iсоединена с тиристорным возбудителем 9, последовательно соединенные третий узел 10 сравнения, регулятор
I1ЭДС, четвертый узел 12 сравнения и регулятор 13 тока возбуждения, выход которого подключен к входу тирис торного возбудителя 9, датчики 1417 и 18 соответственно напряжения тока якоря, тока возбуждения, часто- ты вращения и. ЭДС, выходы которых связаны с входами, соответствующих регуляторов, параллельно якорной обмотке электродвигателя 1 подключена цепь из последовательно соединенных резистора 19 динамического торможения и коммутатора 20, датчик 21 обратной мощности, включенный в цепь переменного тока, последовательно соединенные пятый узел 22 сравнения и регулятор 23 обратной мощности, пороговый элемент 24, причем выход датчика 21 обратной мощности подклю чен к входу порогового элемента 24 и пятого узла 22 сравнения, выход порогового элемента 24 соединен с управляющим входом коммутатора 20, выход регулятора 23 обратной мощности подключен к входу первого узла 4 сравнения.
Вход задатчика 3 интенсивно соединен с выходом задатчика 25 частоты вращения. К цепи переменного тока преобразователя подключены генератор .26 и потребители 27. Блок 28 ограничения тока якоря включен между выходом датчика ,17 частоты вращения и до
полнительным входом регулятора частоты вращения.
Электропривод работает следующим образом.
Режим работы вентильного преобразователя 2 выпрямительный или инвер- торньш и работакщий комплект вентильного преобразователя определяется системой i регулирования электропривода и системой управления вентильного преобразователя автоматически в зависимости от заданного оператором направления перемещения груза и под действием сигналов обратных связей. Рассмотрим процесс опускания груза. При операциях опускания возможен как тормозной спуск с инвертором режимом при больших массах груза, так и силовой спуск с выпрямительным режимом
разователя при малых массах груза или операциях с пустым гаком. При опускании грузов большой массы имеет место рекуперативное торможение с отдачей энергии в переменную сеть тока. В наземных сетях с практически неограниченной мощностью допустима рекуперация энергии практически от любо-. го электропривода, В автономных системах ограничешной мощности рекуперируемая мощность расходуется на питание посторонних (других) потребителей 27 и при их недостаточной мощности передается на первичный двигатель генераторной установки 26. Вели
чина обратной мощности (Рд. ) ограничена условиями эксплуатации генераторных установок и представляет собой разность между рекуперируемой и по- требл яемой другими нагрузками. При значительных величинах Р, необходимо ее огранй чение включением динамического тормо1кения или .снижение скорости опускания груза. Это решается следующим образом.
Величина обратной активной мощно- сти измеряется датчиком 21, к выхо-. ду которого подключен пороговый элемент 24. Порог (уставка) настраивается на определенную величину обратной мощности (например, 5% от номинальной мощности генераторной установки). При срабатывании порогового устройства параллельно якорной цепи электродвигателя 1 посредством коммутатора 20 подключается резистор 19 динамического торможения. При этом часть энергии опускаемого груза рас-
свивается на резисторе 19 в виде тепла, и доля рекуперируемой мопшо- сти падает. Таким образом, цепь динамического торможения подключе 1а не постоянно, а только в случае переда- чи значительной обратной мощности на первичный двигатель генераторной установки. Включение датчика 15 тока якоря между якорной цепью и цепью динамического торможений обеспечива- ет оптимальное протекание переходного процеса привода при включении цепи динамического торможения, так как суммарный ток якоря через датчик 15 тока практически не изменяется, а произойдет разделение этого тока на ток динамического торможения и на ток инвертора. Включение цепи динамического торможения представляет собой первую ступень ограничения мощ- ности, обратной, при дальнейшем ее росте до уровня уставки узла 22 сравнения, который задается уставкой вступает в действие регулятор ( 23 обратной мощности, который выдает в узел 4 сравнения сигнал, вычитающийся из сигнала задающего скорость опускания груза. Снижаются скорость опускания груза, величина рекуперируемой мощности и в свою очередь ве- личина обратной мощности. Вступление в действие регулятора обратной мощности представляет собой вторую ступень ограничения обратной мощности.
Таким образом, осуществляется пря мой контроль и регулирование обратной мощности. При этом обеспечивается повьшение надежности и максимальная производительность выполнения технологических операций опускания,
0 5 0 О
5
5
Формула изобретения Электропривод, содержащий электродвигатель постоянного тока, якорная обмотка которого подключена к вентильному преобразователю, последовательно соединенные задатчик интенсивности, первый узел сравнения, регулятор скорости, второй узел сравнения, регулятор тока якоря, выход которого подключен к входу управления вентильного преобразователя, обмотка возбуждения электродвигателя соединена с тиристорным возбудителем, последовательно соединенные третий узел сравнения, регулятор ЭДС, четвертый узел сравнения и регулятор тока возбуждения, выход которого подключен к входу тиристорного возбудителя, датчики напряжения, тока якоря и возбуждения, скорости и ЭДС, выходы которых связаны с входами соответствующих регуляторов, параллельно якорной обмотке электродвигателя подключена цепь из последовательно соединенных резистора динамического торможения и коммутатора, о т л и - ч ающийся тем, что, с целью повьппения надежности и производительности, в него введены датчик обратной мощности, последовательно соединенные пятый узел сравнения и регулятор обратной мощности, пороговый элемент, причем выход- датчика обратной мощности подключен к входу порогового элемента и пятого узла сравнения, выход порогового элемента соединён с управляющим входом коммутатора, вь1ход регулятора обратной мощности соединен с входом первого ,узла сравнения.
26
HSf
%. .
1/7
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1981 |
|
SU985911A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| Электропривод постоянного тока с двухзонным регулированием скорости | 1975 |
|
SU752711A1 |
| Вентильный электропривод постоянного тока | 1981 |
|
SU974535A1 |
| Электропривод с автономным источником питания | 1984 |
|
SU1236594A1 |
| Устройство для управления электроприводом постоянного тока | 1974 |
|
SU556546A1 |
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Способ регулирования скорости тягового электродвигателя | 1979 |
|
SU783071A1 |
Изобретение относится к электротехнике и может быть использовано в устройствах для управления двигателями в системах с пита.нием от автономных электроэнергетических систем. Повышение надежности и производительности обеспечивается введением датчика обратной мощности, регулятора обратной мощности и порогового элемента. В устройстве обеспечивается двухступенчатое задержанное регулирование мощности рекуперации в зависимости от величины обратной мощности. 1 ил.
| Моцезсейн Б.И | |||
| , Парфенов Б.М | |||
| Электропривод буровых установок | |||
| М.: Недра, 1978, с | |||
| Ребристый каток | 1922 |
|
SU121A1 |
| Электропривод | 1981 |
|
SU985911A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
