Изобретение относится к области космического тренажеростроения и может применяться при подготовке экипажей пилотируемых космических аппаратов (ПКА), отработке бортовой аппаратуры и методики обучения космонавтов по управлению транспортного корабля «СОЮЗ-ТМА» на этапе спуска с орбиты. Известно обучающее устройство, описанное как полезная модель. Положительное решение о выдаче Патента на полезную модель от 27.05.2003 г. по заявке 2003111647 от 29.04.2003 г. Авторы Еремин А.Ф. и др. Данная полезная модель принимается за прототип. Приведенное обучающее устройство позволяет производить обучение космонавтов управлению космическим кораблем в штатных и нештатных ситуациях в режиме управляемого спуска.
Блок-схема данного тренажера укрупненно, с выделением основных узлов применительно к задачам наземной подготовки экипажей, отработки бортовой аппаратуры и методики обучения космонавтов по управлению системой спуска в комплексе систем космического корабля приведена на фиг.1, где:
1 - пульт космонавта;
2 - модель системы управления бортовым комплексом;
3 - модель движения космического корабля;
4 - модель системы управления движением;
5 - пульт контроля и управления тренировкой.
Однако это обучающее устройство не позволяет проводить обучение космонавтов в условиях, приближенных к условиям реального космического полета, когда воздействие перегрузки оказывает влияние на организм человека, что приводит к искажению результатов обучения в управлении космическим аппаратом.
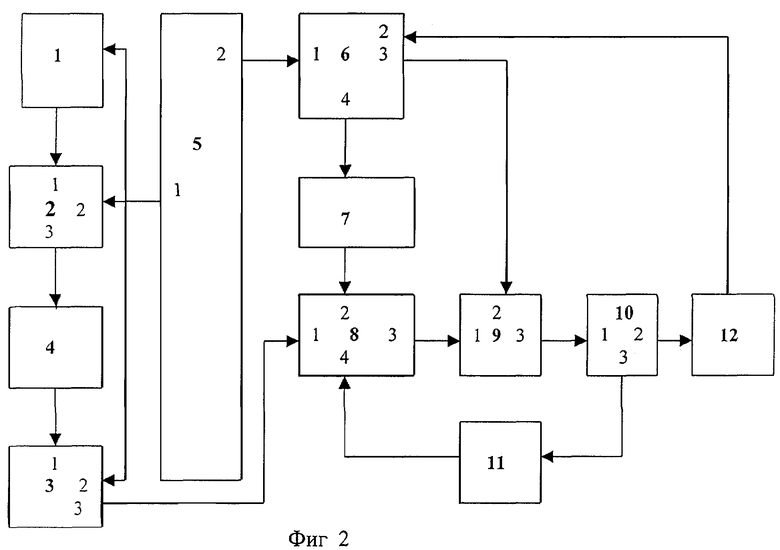
Целью предлагаемого изобретения является обеспечение необходимыми устройствами для обучения экипажей ПКА управлению космическим кораблем в условиях воздействия на космонавта перегрузок, соответствующих воздействию реальной перегрузки в космическом полете. Поставленная цель достигается тем, что в известное устройство. Положительное решение от 27.05.2003 г по заявке 2003111647 от 29.04.2003 г.) - прототип, содержащее последовательно соединенные пульт космонавта, модель системы управления бортовым комплексом, модель системы управления движением, модель движения космического корабля, а также пульт контроля и управления тренировкой, первый выход которого параллельно соединен с пультом космонавта, со вторым входом модели системы управления бортовым комплексом и со вторым входом модели движения космического корабля, дополнительно введены пульт управления центрифугой 6, система обеспечения безопасности 7, блок управления центрифугой 8, блок опорных сигналов и фильтров 9, блок силовых электроприводов 10, блок корректирующих устройств 11, кабина центрифуги 12, выход которой связан со вторым входом пульта управления центрифугой 6, первый вход которого связан со вторым выходом пульта контроля и управления тренировкой 5, а четвертый выход пульта управления центрифугой 6 связан со вторым входом блока управления центрифугой 8 через систему обеспечения безопасности 7, первый вход блока управления центрифугой 8 связан с третьим выходом модели движения космического корабля 3, а третий выход блока управления центрифуги 8 подключен к первому входу блока опорных сигналов и фильтров 9, второй вход которого соединен с третьим выходом пульта управления центрифугой 6, а третий выход блока опорных сигналов и фильтров 9 связан с первым входом блока силовых электроприводов 10, а третий выход которого связан с входом блока корректирующих устройств 11, выход которого связан с четвертым входом блока управления центрифугой 8, а второй выход блока силовых электроприводов 10 связан с входом кабины центрифуги 12.
На фиг. 2 представлена структурная схема динамического тренажера спуска на базе центрифуги ЦФ-18.
На фиг.2 обозначены:
1 - пульт космонавта;
2 - модель системы управления бортовым комплексом;
3 - модель движения космического корабля;
4 - модель системы управления движением;
5 - пульт контроля и управления тренировкой;
6 - пульт управления центрифугой;
7 - система обеспечения безопасности;
8 - блок управления центрифугой;
9 - блок опорных сигналов и фильтров;
10 - блок силовых электродвигателей;
11 - блок корректирующих устройств;
12 - кабина центрифуги.
С пульта управления центрифугой 6 главным оператором подаются команды на переключение режимов работы центрифуги: «СТАРТ», «СТОП», «ИСХОДНОЕ ПОЛОЖЕНИЕ», установку максимально допустимых перегрузки и градиента перегрузки по М-движению (консоль), включение рамп X,Y,Z-движений (кабина, кольцо и вилка); осуществляется контроль и защита космонавтов от опасных динамических режимов в результате сбойных ситуаций в вычислительной системе тренажера. На пульте управления центрифугой на экран монитора главного оператора управления центрифугой выводятся параметры вращения центрифуги и положения космонавтов относительно вектора перегрузки.
Система обеспечения безопасности 7 состоит из блока диагностирования исправности центрифуги, устройства голосовой связи космонавта из кабины центрифуги с главным оператором центрифуги и врачом, блока диагностирования функционирования программы управления центрифугой. Система обеспечения безопасности выдает полную информацию о состоянии космонавтов, находящихся в кабине центрифуги, главному оператору центрифуги и врачу для принятия решения в процессе тренировки космонавтов в динамическом режиме работы тренажера. Блок управления центрифугой 8 обеспечивает расчет управляющих программных сигналов на следящие приводы центрифуги по заданному вектору ускорений и полное управление центрифугой в процессе тренировки в динамическом режиме, включая повороты кабины в начальное положение для тренировки и в исходное положение для эвакуации космонавта. Алгоритм имитации вектора перегрузки, синхронизирующий повороты кабины, кольца, вилки центрифуги с текущим значением радиальной перегрузки или угловой скорости консоли, имеет вид:



θ=π/2,
где:
L - радиус консоли центрифуги,
G - ускорение свободного падения,
γ0 - угловое положение кабины в момент начала моделирования,
γпр - программное угловое положение кабины,
ϕпр - программное угловое положение кольца,
θ - угловое положение вилки,
wпр - программное значение угловой скорости консоли,
Wтк - текущее значение угловой скорости консоли,
nx, ny, nz - заданные составляющие вектора перегрузки (проекции вектора перегрузки в системе координат, связанной с кабиной центрифуги).
Блок опорных сигналов и фильтров 9 условно можно разделить на две части: систему опорных сигналов и следящую систему. Основным элементом системы опорных сигналов является так называемый рампный блок - нелинейный фильтр, ограничивающий по скорости и ускорению программные сигналы, поступающие на вход следящей системы. Это одна из мер защиты электродвигателей и вращающихся контактных устройств от перегрузки по току, а редукторов от механических перегрузок; максимальная угловая скорость - 96 град/сек; максимальное угловое ускорение - 1 рад/сек2.
Среди других научно-технических проблем, связанных с тренировкой космонавтов по управлению спуском корабля "Союз-ТМА" на динамическом тренажере, особо выделяется проблема обеспечения адекватности моделирования динамических факторов полета на центрифуге ЦФ-18.
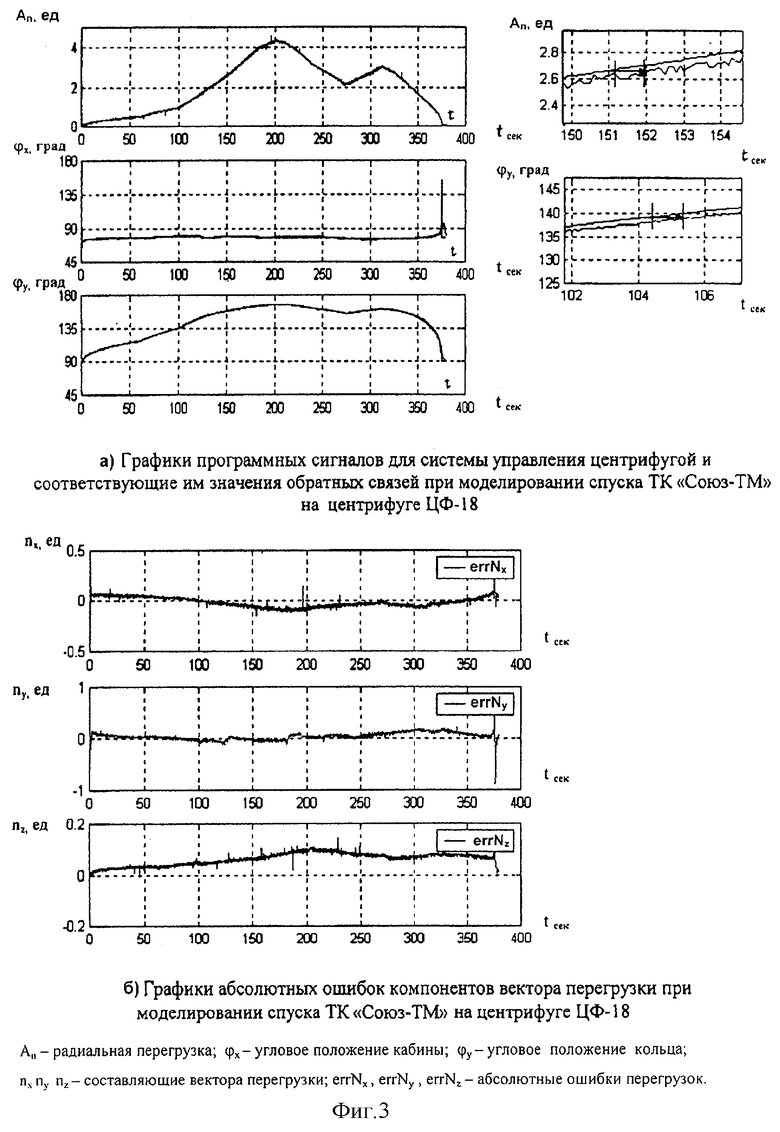
Частотные характеристики электроприводов центрифуги пригодны для воспроизведения медленно меняющегося вектора линейной перегрузки, действующей при спуске корабля "Союз-ТМА", однако погрешности при отслеживании вычисленной в модели движения перегрузки имеют место и их причиной в том числе является наличие динамического запаздывания электроприводов при отработке программных сигналов. Временной сдвиг графика перегрузки составляет от 0,8 до 1,0 секунды. Повысить точность моделирования позволил выбор оптимальных корректирующих устройств 11 для коррекции движения центрифуги, состоящих из двух частей: в прямой цепи и в обратной связи. Благодаря этому динамическое запаздывание приводов центрифуги при моделировании перегрузки на участке спуска корабля "Союз-ТМА" уменьшилось не менее чем в 3 раза. Результаты испытаний приведены в графической форме на фиг.3.
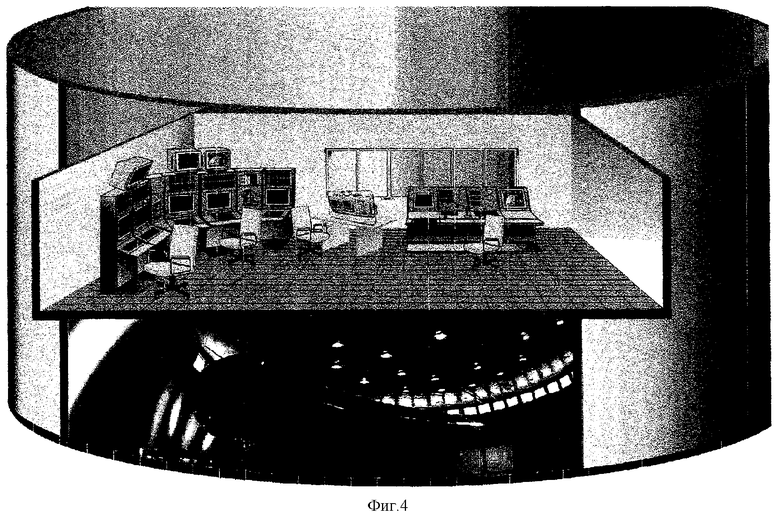
Центрифуга ЦФ-18 представляет собой динамический стенд, имеющий четыре степени свободы движения: кабины, или Х-движение, кольца, или Y-движение, вилки, или Z-движение, и движение консоли, или М-движение. Каждая степень свободы является управляемой посредством реверсивных тиристорных преобразователей различной мощности. Исполнительными устройствами являются силовые электродвигатели 10 постоянного тока с независимым возбуждением. Фактически каждый тиристорный преобразователь представляет собой законченную следящую систему по угловой скорости. В динамическом режиме работы динамического тренажера спуска рабочее место оператора (РМО) располагается в кабине "А" центрифуги 12, которая находится в трехстепенном карданном подвесе. Общий вид динамического тренажера спуска на базе центрифуги ЦФ-18 приведен на фиг.4. В кабине центрифуги размещены основные устройства РМО: пульт космонавта "Нептун-МЭ", кресло "Казбек-УМ" - командира корабля, кресло "Казбек-УМ" - бортового инженера, ручка управления спуском, устройство связи с вычислительной системой, аппаратура контроля и связи. Все элементы РМО при испытаниях подверглись воздействию радиальных и боковых перегрузок. Радиальные перегрузки достигали величин 13 единиц, боковые перегрузки - 6 единицу.
При моделировании режима спуска на динамическом тренажере после прохождения команды "Разделение", по которой происходит разделение Приборного отсека и Спускаемого аппарата, на пульте контроля и управления тренировкой и на пульте управления центрифугой загорается красным цветом индикатор "Перегрузка". После этого главный оператор с пульта управления центрифугой выдает разрешение на запуск центрифуги (вращение), при достижении моделируемой перегрузки n≥0.5g (в модели движения осуществляется интегрирование уравнений спуска в реальном масштабе времени) центрифуга автоматически трогается и плавно, медленно вращается и после достижения моделируемой перегрузки n≥1g центрифуга отслеживает вычисленную в модели движения перегрузку, соответствующую реальной перегрузке, воздействующей на космонавта, при спуске космического корабля. Блоки 7, 8, 9, 11 выполнены в виде программных модулей и реализованы на универсальных вычислителях типа Pentium-4.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2006 |
|
RU2326447C1 |
| ТРЕНАЖЕР ДЛЯ КОСМОНАВТОВ | 2015 |
|
RU2578644C1 |
| КОМПЛЕКСНЫЙ ТРЕНАЖЁР ДЛЯ КОСМОНАВТОВ | 2013 |
|
RU2534474C2 |
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
| ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ КОМПЛЕКСА ЗАДАЧ ПО ИССЛЕДОВАНИЮ АСТРОНОМИЧЕСКОГО ОБЪЕКТА УЧАСТНИКАМИ КОСМИЧЕСКОЙ ЭКСПЕДИЦИИ | 2015 |
|
RU2581643C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ОРБИТАЛЬНОГО УЗЛОВОГО МОДУЛЯ РОССИЙСКОГО СЕГМЕНТА МЕЖДУНАРОДНОЙ КОСМИЧЕСКОЙ СТАНЦИИ | 2012 |
|
RU2506647C1 |
| ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2014 |
|
RU2554198C1 |
| ТРЕНАЖЕР ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ КОСМОНАВТОВ | 2012 |
|
RU2506648C1 |
| СИМУЛЯТОР ПОЛЕТА КОСМИЧЕСКОГО КОРАБЛЯ | 2017 |
|
RU2653448C1 |
| ТРЕНАЖЁРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОСМИЧЕСКИХ КОРАБЛЕЙ К ДЕЙСТВИЯМ ПОСЛЕ ПОСАДКИ ПИЛОТИРУЕМОЙ КАПСУЛЫ НА МОРЕ С ВОЛНЕНИЕМ | 2020 |
|
RU2734659C1 |
Изобретение относится к области космического тренажеростроения и может применяться при подготовке экипажей пилотируемых космических аппаратов. Тренажер содержит последовательно соединенные пульт космонавта, модель системы управления бортовым комплексом, модель системы управления движением, модель движения космического корабля, блок управления центрифугой, блок опорных сигналов и фильтров, блок силовых электроприводов и кабину центрифуги. При этом блок управления центрифугой соединен через систему обеспечения безопасности с пультом управления центрифугой, который связан с блоком опорных сигналов и фильтров и с кабиной центрифуги. Пульт контроля и управления тренировкой параллельно соединен с пультом космонавта, моделью системы управления бортовым комплексом, моделью движения космического корабля и пультом управления центрифугой. Изобретение обеспечивает обучение управлением космического аппарата при воздействии перегрузок, соответствующих реальным. 4 ил.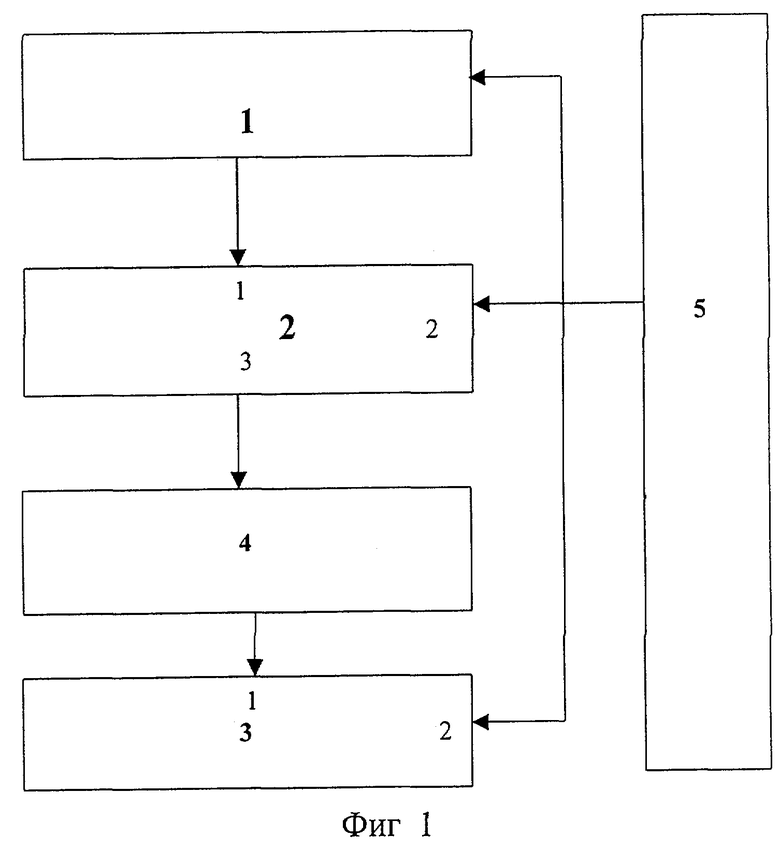
Динамический тренажер, содержащий последовательно соединенные пульт космонавта, модель системы управления бортовым комплексом, модель системы управления движением, модель движения космического корабля, а также пульт контроля и управления тренировкой, первый выход которого параллельно соединен с пультом космонавта, со вторым входом модели системы управления бортовым комплексом и со вторым входом модели движения космического корабля, отличающийся тем, что дополнительно введены пульт управления центрифугой, система обеспечения безопасности, блок управления центрифугой, блок опорных сигналов и фильтров, блок силовых электроприводов, блок корректирующих устройств, кабина центрифуги, выход которой связан со вторым входом пульта управления центрифугой, первый вход которого связан со вторым выходом пульта контроля и управления тренировкой, а четвертый выход пульта управления центрифугой связан со вторым входом блока управления центрифугой через систему обеспечения безопасности, первый вход блока управления центрифугой связан с третьим выходом модели движения космического корабля, а третий выход блока управления центрифугой подключен к первому входу блока опорных сигналов и фильтров, второй вход которого соединен с третьим выходом пульта управления центрифугой, а третий выход блока опорных сигналов и фильтров связан с первым входом блока силовых электроприводов, третий выход которого связан с входом блока корректирующих устройств, выход которого связан с четвертым входом блока управления центрифугой, а второй выход блока силовых электроприводов связан с входом кабины центрифуги.
| Аппарат для определения количества нефти или мазута | 1931 |
|
SU31671A1 |
| SU 1360443 A1, 20.01.1996 | |||
| US 3732630 А, 15.05.1943 | |||
| DE 19640730 A1, 09.04.1998. | |||

