Изобретение относится к транспортным средствам, в частности к самоходным транспортным средствам, содержащим мотор-колеса, управление которых осуществляется регулированием скорости вращения мотор-колес.
Целью изобретения является повышение эффективности путем обеспечения однозначности между заданным и фактическим значениями частот вращения мотор-колес.
На чертеже представлена блок-схема самоходного транспортного средства.
Самоходное транспортное средство содержит платформу 1, четыре мотор-колеса 2-5, блок 6 управления, который может быть выполнен в виде двух генераторов с управляемой частотой управляющего сигнала, первый вход которого соединен с задатчиком 7 угла поворота, механически связанным с рулем 8 управления, второй вход с задатчиком 9 скорости, механически связанным с педалью 10 скорости, третий вход с задатчиком 11 направления движения, механически связанным с кнопкой 12 "Вперед-назад", четвертый вход с задатчиком 13 разворота, механически связанным с кнопкой 14 разворота. Первый выход блока 6 управления, связанный с входами исполнительных органов мотор-колес 2 и 3 левого борта, соединен с первыми входами сумматоров 15 и 16 и через блок 17 фазового сдвига с первыми входами сумматоров 18 и 19, а выходы всех четырех сумматоров левого борта через соответствующие им усилители 20, 21, 22 и 23 соединены с входами исполнительных органов, которые могут быть выполнены в виде электропневмогидроприводов, причем штоки 24 и 25 исполнительных органов 26 и 27 шарнирно связаны с преобразователем 28 возвратно-поступательного движения во вращательное переднего колеса 29, а штоки 30 и 31 исполнительных органов 32 и 33 с преобразователем 34 возвратно-поступательного движения во вращательное заднего колеса 35. Шток каждого исполнительного органа механически связан с соответствующим датчиком 36, 37, 38 и 39 положения, выходы которых через соответствующие им инверторы 40, 41, 42 и 43 соединены с вторыми входами соответствующих сумматоров 15, 16, 18 и 19. Второй выход блока 6 управления, связанный с входами исполнительных органов мотор-колес 4 и 5 правого борта, соединен с первыми входами сумматоров 44 и 45 и через блок 46 фазового сдвига с первыми входами сумматоров 47 и 48, и выходы всех четырех сумматоров правого борта через соответствующие им усилители 49, 50, 51 и 52 соединены с входами исполнительных органов, причем штоки 53 и 54 исполнительных органов 55 и 56 шарнирно связаны с преобразователем 57 возвратно-поступательного движения во вращательное переднего колеса 58, а штоки 59 и 60 исполнительных органов 61 и 62 с преобразователем 63 возвратно-поступательного движения во вращательное заднего колесам 64. Шток каждого исполнительного органа механически связан с соответствующим датчиком 65, 66, 67 и 68 положения, выходы которых через соответствующие инверторы 69, 70, 71 и 72 соединены с вторыми входами соответствующих сумматоров 44, 45, 47 и 48.
Самоходное транспортное средство работает следующим образом.
При прямолинейном движении механическое перемещение педали 10 скорости преобразуется задатчиком 9 скорости в электрический сигнал, который поступает на блок 6 управления, формирующий первый и второй электрические синусоидальные сигналы управления равной частоты, пропорциональной скорости вращения мотор-колес. С первого выхода блока 6 управления первый сигнал управления через сумматор 15 и 16, усилители 20 и 21 поступает на входы исполнительных органов 26 и 27 и преобразуется в механические синусоидальные колебательные движения штоков 24 и 25. Одновременно этот сигнал, сдвинутый по фазе на 90о блоком 17 фазового сдвига, через сумматоры 18 и 19 и усилители 22 и 23 поступает на входы исполнительных органов 32 и 33 и преобразуется в косинусоидальные механические колебания штоков 30 и 31. В результате суммирования синусоидальных и косинусоидальных движений штоков 24, 30 и 25, 31 при помощи преобразователей 28 и 34 возвратно-поступательных движений во вращательное колеса 29 и 35 приводятся в круговое равномерное вращение, причем скорость их вращения строго соответствует частоте колебаний сигналов управления, т.е. при частоте 1 Гц осуществляется один оборот в секунду, при 2 Гц два оборота в секунду и т.д. При изменении нагрузки скорость остается постоянной, равной частоте колебаний сигнала управления, однако, для равномерного вращения необходимо, чтобы при изменении нагрузки амплитуда колебаний штоков исполнительных органов оставалась также постоянной. Это достигается введением отрицательных обратных связей, сформированных датчиками 36-39 положения и инверторами 40-43. С второго выхода блока 6 управления второй сигнал управления преобразуется в круговое равномерное вращение колес 58 и 64 аналогично вышеописанному при помощи сумматоров 44, 45, 47 и 48, блока 46 фазового сдвига, усилителей 49-52, исполнительных органов 55, 56, 61 и 62 с штоками 53, 54, 59 и 60, преобразователей 57 и 63 возвратно-поступательного движения во вращательное. Отрицательные обратные связи сформированы датчиками 65-68 положения и инверторами 69-72.
Для осуществления поворота, например, налево механический поворот руля управления преобразуется задатчиком 7 угла поворота в электрический сигнал, который, поступая на блок 6 управления, увеличивает частоту колебаний второго сигнала управления и одновременно уменьшает на столько же частоту колебаний первого сигнала управления. Преобразование этих сигналов в механическое вращение мотор-колес приводит к тому, что скорость вращения мотор-колес 4 и 5 правого борта больше, чем скорость вращения мотор-колес 2 и 3 левого борта, в результате чего происходит поворот транспортного средства.
Разворот на месте осуществляется нажатием на кнопку 14 разворота. Это воздействие преобразуется в электрический сигнал задатчиком 13 разворота, который поступает на блок 6 управления и меняет полярность одного из сигналов управления, например первого. Преобразование этого сигнала во вращательное движение мотор-колес приводит к тому, что мотор-колеса 2 и 3 левого борта вращается в обратном направлении по сравнению с колесами 4 и 5 правого борта, в результате чего происходит разворот транспортного средства.
Изменение движение транспортного средства на обратное (реверс) осуществляется нажатием на кнопку 12 "вперед-назад". Это воздействие преобразуется задатчиком 11 направления движения в электрический сигнал, который поступает на блок 6 управления и меняет полярность обоих сигналов управления, что приводит к вращению в обратную сторону мотор-колес обоих бортов.
Благодаря изобретению повышается маневренность, управляемость, приемистость, стабилизация скорости вращения мотор-колес при изменении нагрузки, что приводит к повышению проходимости. Транспортное средство, управление скоростью вращения мотор-колес которого осуществляется предлагаемым способом, может быть выполнено как на колесном, так и на гусеничном ходах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевое управление транспортного сред-CTBA CO ВСЕМи упРАВляЕМыМи КОлЕСАМи | 1979 |
|
SU823206A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВОЗДУШНО-РЕАКТИВНЫМ ДВИГАТЕЛЕМ | 1989 |
|
SU1656948A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
| Рулевое управление с изменяемым передаточным числом | 1983 |
|
SU1100179A1 |
| ТЕРМОННЫЙ РЕГУЛЯТОР | 1992 |
|
RU2017200C1 |
| Рулевое устройство колесного транспортного средства | 1978 |
|
SU766941A1 |
| Самоходное шасси | 1979 |
|
SU872359A2 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| ВРАЩАТЕЛЬНОЕ УСТРОЙСТВО И ПРИВОД ВРАЩЕНИЯ (ВАРИАНТЫ) | 2010 |
|
RU2568343C1 |
| Устройство рулевого управления колесного транспортного средства | 1978 |
|
SU742232A1 |
Изобретение относится к транспортным средствам, в частности к самоходным транспортным средствам, содержащем мотор-колеса, управление которых осуществляется регулированием скорости вращения мотор-колес. Целью изобретения является повышение эффективности путем обеспечения однозначности между заданным и фактическим значениями частот вращения мотор-колес. Транспортное средство содержит платформу 1, ходовую часть, выполненную в виде четырех мотор-колес 2 5, блок 6 управления, к которому подключены задатчик 7 угла поворота, связанный с рулем 8, задатчик 9 скорости, задатчик 11 направления движения, задатчик 13 разворота, сумматоры 15, 16, 18 и 19, усилители 20, 21, 22, 23, 49, 50, 51 и 52; два блока 17 и 46 фазового сдвига, восемь исполнительных органов 26, 27, 32, 33, 55, 56, 61 и 62, восемь инвертов 40, 41, 42, 43, 65, 66, 71 и 72, восемь датчиков положения штоков 24, 25, 30, 31, 53, 54, 59 и 60 исполнительных органов и четыре преобразователя 28, 34, 57 и 63 возвратно-поступательного движения исполнительных органов во вращательное движение мотор-колес. Первый и второй сигналы управления формируют в виде электрических синусоидальных колебаний блоком 6 управления, одновременно эти сигналы сдвигают по фазе на 90° блоками 17 и 46 для получения первого и второго скорректированных по фазе сигналов. Первый сигнал управления и первый скорректированный сигнал управления преобразуют в механические колебательные движения штоком пар исполнительных органов 26, 27 и 32, 33 мотор-колес 2 и 3 одного из бортов. Механические колебательные движения штоков исполнительных органов по форме соответствуют сигналам управления. Эти колебания затем преобразуют во вращательное движение мотор-колес преобразователями 28 и 34. 1 ил.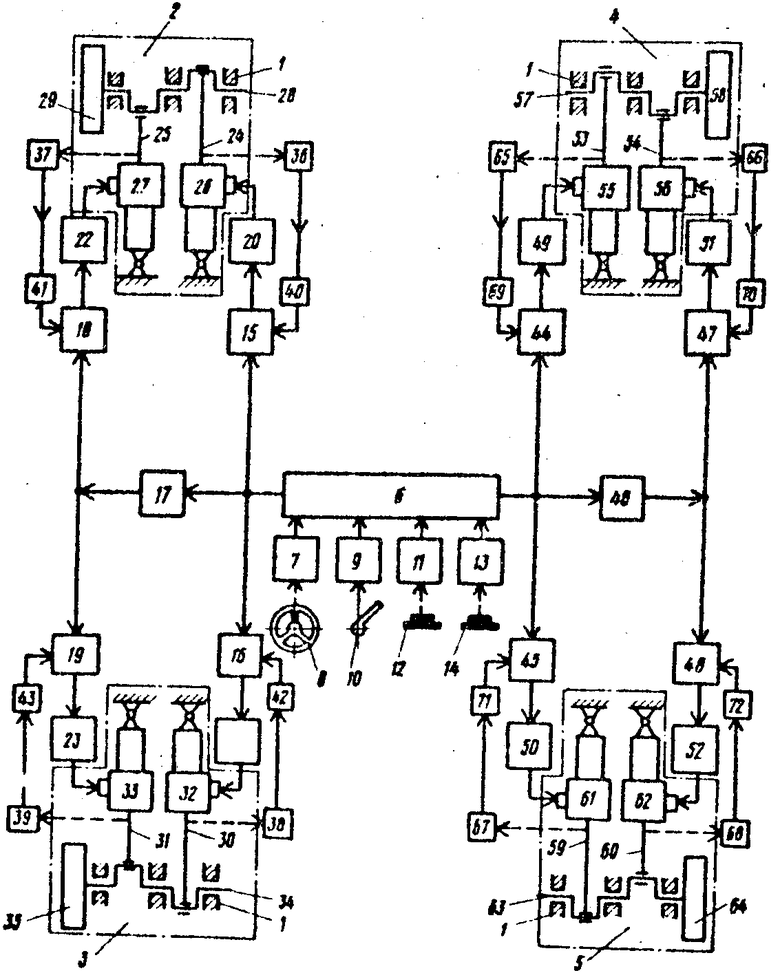
САМОХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО, содержащее платформу, ходовую часть, выполненную в виде мотор-колес, блок управления и автономные системы регулирования частот вращения мотор-колес, отличающееся тем, что, с целью повышения эффективности путем обеспечения однозначности между заданным и фактическим значениями частот вращения мотор-колес, оно снабжено задатчиком угла поворота, задатчиком скорости, задатчиком направления движения, задатчиком разворота, четырьмя сумматорами, восемью усилителями, двумя блоками фазового сдвига, восемью инверторами, восемью датчиками положения штоков исполнительных органов, причем первый вход блока управления соединен с задатчиком угла поворота, второй вход с задатчиком скорости, третий вход с задатчиком направления движения, четвертый вход с задатчиком разворота, первый выход блока управления, связанный с входами исполнительных органов мотор-колес одного из бортов, соединен с первыми входами первого и второго сумматоров и через блок фазового сдвига с первыми входами третьего и четвертого сумматоров, выходы всех четырех сумматоров через соответствующие им первый, второй, третий и четвертый усилители соединены с входами исполнительных органов мотор-колес, включающих в себя штоки и преобразователи возвратно-поступательного движения во вращательное движение мотор-колес, причем штоки первого и третьего исполнительных органов шарнирно связаны с преобразователем возвратно-поступательного движения во вращательное переднего мотор-колеса, штоки второго и четвертого исполнительных органов с преобразователем возвратно-поступательного движения во вращательное заднего мотор-колеса, причем шток каждого исполнительного органа механически связан с соответствующим датчиком положения штоков исполнительных органов, выходы датчиков через первый, второй, третий и четвертый инверторы соединены с вторыми входами соответствующих сумматоров, второй выход блока управления, связанный с входами исполнительных органов другого борта, соединен с первыми входами пятого и шестого сумматоров и через другой блок фазового сдвига с первыми входами седьмого и восьмого сумматоров, выходы пятого, шестого, седьмого и восьмого сумматоров через соответствующие пятый, шестой, седьмой, восьмой усилители соединены с входами исполнительных органов, причем штоки пятого и седьмого исполнительных органов шарнирно связаны с преобразователями возвратно-поступательного движения во вращательное движение переднего мотор-колеса, штоки шестого и восьмого исполнительных органов с преобразователем возвратно-поступательного движения во вращательное движение заднего мотор-колеса, при этом шток каждого исполнительного органа механически связан с соответствующим датчиком положения штоков исполнительных органов, выходы датчиков положения через соответствующие инверторы соединены с вторыми входами пятого, шестого, седьмого и восьмого сумматоров.
| Авторское свидетельство СССР N 759383, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
