(54) САМОХОДНОЕ ШАССИ
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1986 |
|
SU1441674A1 |
| Устройство для регулирования частоты вращения тяговых двигателей прицепа транспортного средства | 1981 |
|
SU1004169A2 |
| Самоходное шасси | 1979 |
|
SU867755A2 |
| Самоходная тележка | 1989 |
|
SU1691205A1 |
| Тяговый электропривод переменного тока для транспортного средства | 1983 |
|
SU1185530A1 |
| Устройство для распределения мощности между мотор-колесами скрепера | 1983 |
|
SU1180460A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2003 |
|
RU2257663C2 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
1
Изобретение относится к самоходным транспортным средствам.
По основному авт. св. № 759383 известно самоходное шасси {I.
Однако известное самоходное шасси характеризуется недостаточной управляемостью из-за рассогласования частот вращения мотор-колес.
Цель изобретения - улучшение управляемости самоходного шасси.
Указанная цель достигается тем, что самоходное шасси снабжено двумя блоками умножения, двумя блоками сравнения, двумя нуль-блоками, блоком отсечки, логическим элементом И, логическим элементам ИЛИ и управляемым ключом, информационный вход которого подключен к выходу задатчика радиуса поворота, причем выход последнего соединен с однополярными входами автономных систем регулирования частот вращения мотор-колес одного борта шасси и с входами противоположной полярности автономных систем регулирования частот вращения мотор-колес другого борта, вход управляемого ключа соединен с выходом логического элемента ИЛИ, первый вход которого соедняен с выходом блока
отсечки, а второй - с выходом логического элемента И, каждый из входов которого соединен с соответствуюш.им выходом нульблоков, входы которых соединены с выходами блоков сравнения и первыми входами блоков умножения, а вторые входы блоков умножения, выход задатчика скорости прямолинейного движения и вход блока отсечки соединены между собой и подключены к однополярным входам автономных систем регулирования частот вращения мотор-ко10 лес обеих бортов, при этом выходы блоков умножения соединены с разнополярными входами автономнйх систем регулирования частот вращения мотор-колес соответствующего моста, суммирующие входы блоков сравнения соединены между собой и подключены К выходу задатчика угла поворота мостов, а их- вычитающие входы подключены к выходам датчиков угла поворота соответствующего моста щасси.
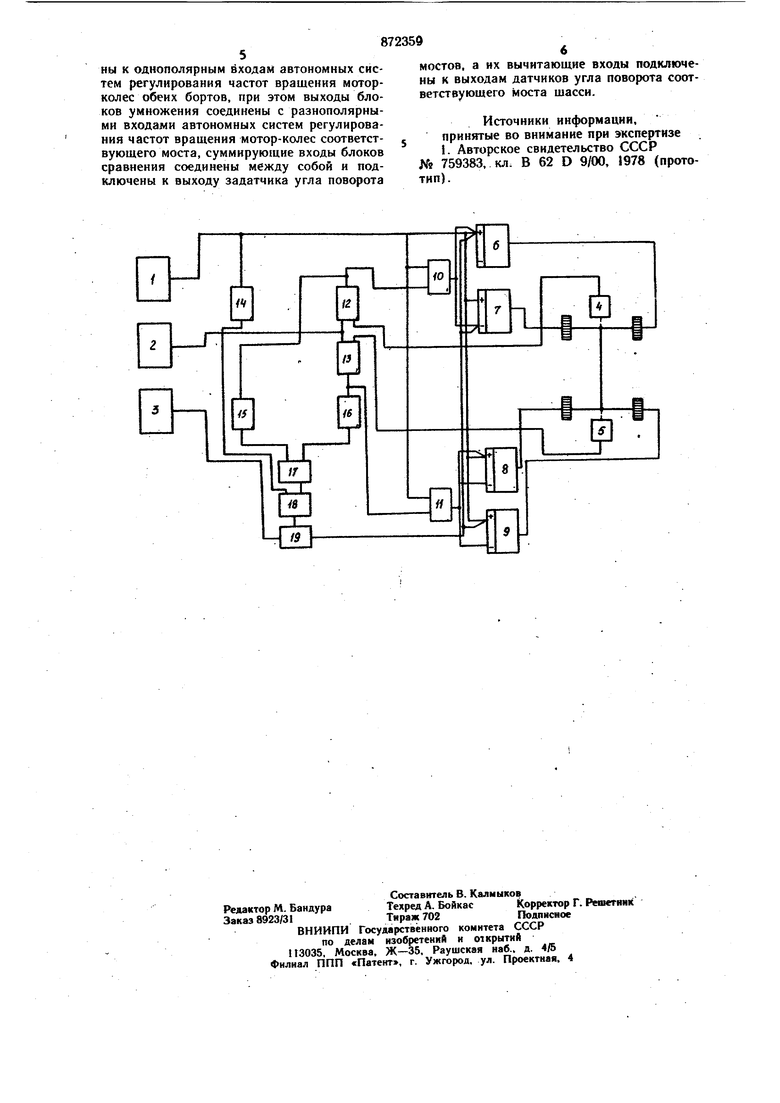
На чертеже представлена блок-схема управления самоходным шасси.
20
Самоходное щасси содержит задатчик I скорости прямолинейного движения, задатчик 2 .угла поворота мостов, задатчик 3 радиуса поворота, датчик 4 и 5 угла поворота мостов, автономные системы управления частотой вращения мотор-колес 6 - 9, блоки 10 и И умножения, блоки 12 и 13 сравиения, блок 14 отсочки, два нуль-блока 15 и 16. элемент 17 И, элемент 18 ИЛИ и управляемый ключ 19.
Выход задатчика 1 подключен к одноименным входам автономных систем всех мотор-колес и при наличии сигнала как зйлибо полярности на выходе задатчика I направление частоты вращения всех моторколес одинаковы. При перемене полярности сигнала направление вращения мотор-колес меняется на противоположное.
Выход задатчика 2 подключен к суммирующим входам блоков 12 и 13, вычитающий вход блока 12 подключен к выходу Датчика 4, а вычитающий вход блока 13 подключен к выходу датчика 5. В блоках 12 и 13 производится вычитание сигналов от датчиков 4 и 5 из сигнала задатчика 2. Сигналы от блоков 12 и 13 подаются на первые входы блоков 10 и 11, а на вторые входы этих блоков подается сигнал задатчика 1. В блоках 10 и II производится перемножение сигналов и тем самым усиление указанного разностного сигнала пропорционально величине сигнала задания скорости. Выход блока 10 соединен с разнополярными входами автономных б и 7 систем регулирования Частот враи1ения мотор-колес одного моста, выход 6;ioKa 11 соединен с разпополярными входами систем 8 и 9 регулирования частот вращения Мотор-колес другого моста. По мере отрабатывания обоими .мостами заданного угла поворота сигнал нл выходе блоков 10-13 уменьшается и при равенстве фактического и заданного углов поворота он равен нулю. В этот момент срабатывают нуль-блоки 15 и 16, ВХО/.1Ы которых подключены соответственно к выходам блоков 12 и 13, а выходы подключены к входам элемента 17 И. Разрешающий сигнал с выхода э-темента 17 И подается через элемент 18 ИЛИ на управляющий ход управляемого ключа 19, информационный вход которого подключен к задатчику 3, а выход к однополярным входам автономных систем 6 и 9 регулирования частот вращения моторколес одного борта и к входам противоположной полярности автономных систем 7 и 8 мотор-колес другого борта. Таким образом, сигнал от задатчика 3, задающий рассогласйвание частот вращения мотор-колес по бортам, подается через управляемый ключ 19 на входы автономных систем мотор-колес только в момент достижения равенства заданного и фактического угла поворота обоих мостов.
При маневрировании на средних и больщих скоростях нет необходнмости в разделительной отработке сигнала управления по углу и радиусу поворота. При некоторой величине сигнала на выходе задатчика 1 сработает блок 14 отсечки, вход KOTopoio подключен к выходу задатчика 1, и разрещающий сигнал от блока отсечки через элемент 18 ИЛИ поступает на управляющий вход ключа 19. Дальнейшая работа схемы уже не зависит от состояния нуль-блоков 15 н
16, сигналы от всех задатчиков органа управления одновременно воздействуют на входы автономных систем регулирования частотой вращения мотор-колес.
Маневрирование самоходным щасси осуществляется известным способом. Вместе
с тем, в предлагаемом шасси при малых скоростях движения имеет место раздельная отработка сигнала управления по углу и радиусу поворота с усилением сигнала управления по углу поворота мостов пропорционально величине сигнала задания скорости.
При маневрировании на скоростях движения выше заданных раздельная отработка сигналов прекращается за счет срабатывания блока 14 отсечки и исключения нульблоков 15 и 16. Сигналы от задатчиков органа управления воздействуют на автономные системы регулирования частот вращения мотор-колес одновременно.
Применение предлагаемого шасси позволит повысить качество маневрирования при малых и больших скоростях движения как за счет устранения зоны нечувствительности автономных систем регулирования при малых сигналах управления, так и за счет увеличения скорости отработки поворота при больших сигналах управления.
ФopмyJШ изобретения
Самоходное шасси по авт. св. № 759383,
отличающееся тем, что, с целью улучшения управляемости, оно снабжено двумя блоками умножения, двумя блоками сравнения, двумя нуль-блоками, блоком отсечки, логическим элементом И, логическим элементом
0 ИЛИ и управляемым ключoм информационный вход которого подключен к выходу задатчика радиуса поворота, причем выход последнего соединен с однополярными входа fй автономных систем регулирования частот вращения мотор-колес одиснго борта
5 шасси и с входами противоположной полярности автономных систем регулирования частот врашемия мотор-колес другого .борта, вход управляемого ключа соединен с выходом логического элемента ИЛИ, первый вход которого соединен с выходом блока отсечки, а второй - с выходом логического элемента И, каждый из входов которого соединен с соответствующим выходом нульблоков, входы которых соединены с выходами блоков сравнения и с .первыми входами 6.1ОКОВ умиожения, а вторые входы блоков умножения, выход задатчика скорости прямолниейиого движения и вход блока отсечки соединены между собой и подключены к однополярным входам автономных систем регулирования частот врашения моторколес обеих бортов, при этом выходы блоков умножения соединены с разнополярными входами автономных систем регулирования частот врашения мотор-колес соответствующего моста, суммирующие входы блоков сравнения соединены между собой и подключены к выходу задатчика угла поворота
мостов, а их вычитающие входы подключены к выходам датчиков угла поворота соответствующего моста щасси.
Источники информации, принятые во внимание при экспертизе . Авторское свидетельство СССР № 759383, кл. В 62 D 9/00, 1978 (прототип).
