Изобретение относится к транспортировке судов из одного бьефа рейки в другой через .гребень плотины, в частности к управлению гидрообъемным приводом движителя судовозной тележки наклонного судоподъемника, и может Ч1айти применение лри разработке новых и модернизации существукещх систем управления судоподъемниками.
Целью изобретения является повышение эффективности путем увеличения точности определения позиции тележки.
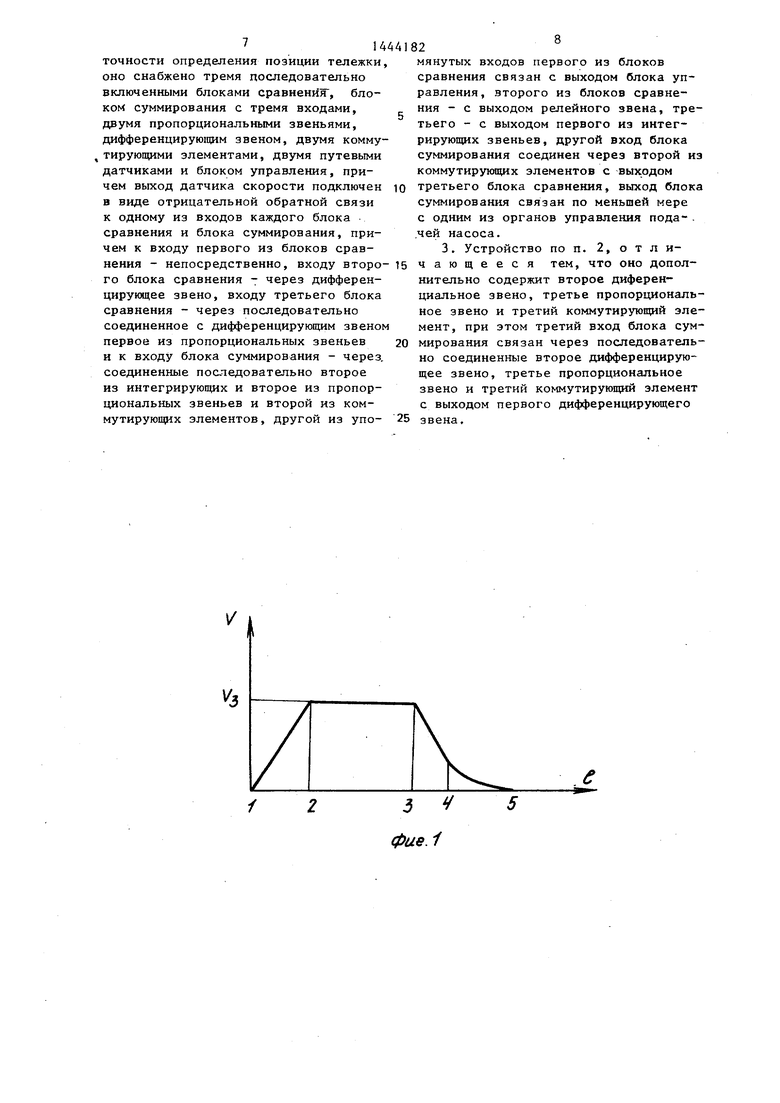
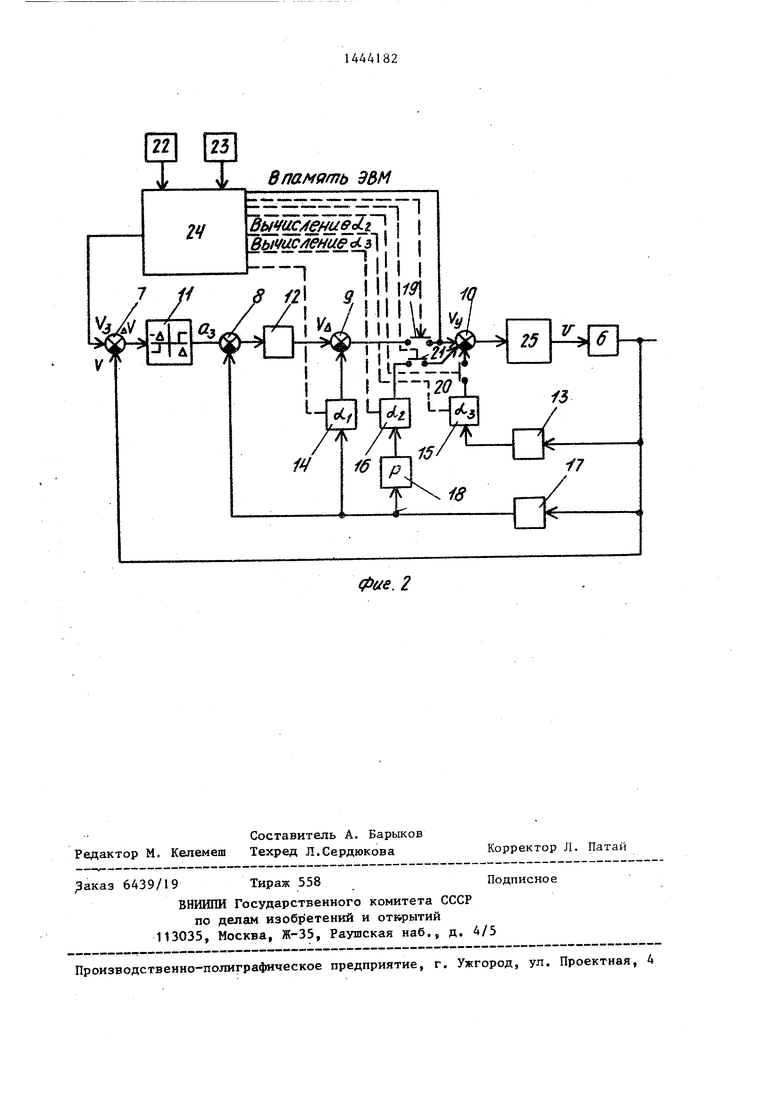
На фиг. 1 показана реализуемая в соответствии с предложенным способом управления зависимость скорости движения судовозной тележки от пути; на фиг, 2 - структурная схема устройства для осуществления способа управления гидрообъемным приводом движителя судовозной тележки.
Зависимость скорости V движения судовозной тележки от пути (фиг. 1) имеет участки: ускорения 1-2, стабилизированной скорости 2-3, замедле- иия 3-4 /и точного позиционирования 4-5.
Устройство (фиг.2) для осуществления предлагаемого способа управления содержит датчик 6 скорости движения тележки, первый 7, второй 8, третий. 9 и четвертый 10 блоки сравнения, релейное звено I1, первое 12 и второе 13 интегрирующие звенья, первое 14, второе 15 и третье 16 пропорциональ- Hiie звенья, первое 17 и второе 18 дифференцирующие звенья, первый 19, второй 20 и третий 21 коммутирующие элементы, первый 22 и второй 23 путевые датчики, управляющую ЭВМ 24. Вход датчика 6 скорости подключен к выходу объекта 25 управления - судовозной тележке с гидрообъемным приводом движителя, а выход подключен в виде отрицательной обратной связи к одному из входов каждого блока сравнения, причем к входу первого блока 7 сравнения непосредственно, второго 8 - через первое дифференцирующее звено 17, третьего 9 - через соединен- ное последовательно с первым дифференцирующим звеном 7 первое пропор- гшональное звено 14 и четвертого 10 - через соединенные последовательно второе иктегрируклцее звено 13, вто- рое пропорциональное звено 15 и второй коммутирующий элемент 20. Другой из упомянутых входов первого блока 7 сравнения связан с выходом управляющей ЭВМ 24. Второй вход второго блока 8 сравнения связан с выходом релейного звена 11. Между выходом второго блока 8 сравнения и вторым из упомянутых входов третьего блока 9 сравнения включено первое интегрирующее звено 12. Второй вход четвертого блока 10 сравнения связан с памятью управляющей ЭВМ 24 и через первый коммутирующий элемент 19 - с выходом третьего блока 9 сравнения. Четвертый блок 10 сравнения имеет третий вход, который связан через соединенные последовательно второе дифференцирующее звено 18 , третье пропорциональное звено.16 и третий коммутирующий элемент 21 с выходом первого дифференцирующего звена 1,7. Выход четвертого блока 10 сравнения связан по меньшей мере с одним из органов управления подачей насосов как .с управляющим входом объекта 25 управления. Выходы первого 22 и второго 23 путёвых датчиков связаны с входами управляющей ЭВМ 24, а выходы управляющей ЭВМ 24 - с элементами настройки пропорциональных звеньев 14-16 и с органами управления коммутирующие элементов 19-21.
Предлагаемый способ управления осуществляется описанным устройством следующим образом.
В соответствии с заданной зависимостью скорости судовозной тележки от пути (l) (фиг.1) на входе первого блока 7 сравнения (фиг.2) посредством управляющей ЭВМ 24 формируется заданное значение скорости V. движения судовозной тележки. Текущее значение скорости движения измеряется датчиком 6. В блоке 7 сравнения вычисляется разность &У между заданным Уг и .текущим V значениями скорости
.
(I)
Из полученного рассогласования релейным звеном I1 формируется релейна характеристика с ординатой, равной заданному значению ускорения а- или замедлейия -а в зависимости от знака рассогласования &V на входе релейного звена 11. Релейная характеристика, формируемая звеном 1I, имеет зону нечувствительности + Л, соответствующую необходимой точности стабилизации значения Va. Из получаемого на выходе релейного звена 11 заданного
значения а ускорения во втором блок
8 сравнения вычитается фактическое значение ускорения а, определяемое дифференцированием фактического значения скорости V с помощью дифференцирующего звена 17, т.е. блок 8 сравнения реализует выражение
aj;-a a.(2)
Значение рассогласования а. на выхоU
де блока 8 сравнения интегрируется в первом интегрирующем звене 12; из результата в третьем блоке 9 сравнения вычитается корректируюнщй сигнал ei,a, причем значение коэффициента oti подбирается из условия обеспечения необходимого качества переходного процесса, в данном случае апериодического. Откорректированный сигнал V VA-ci,a(3)
подается с выхода третьего блока 9 сравнения через замкнутый на участка ускорения, постоянной скорости и замедления первый коммутирующий элемент 19 и четвертый блок 0 сравнения на вход объекта 25 управления. В момент трогания скорость тележки , входной сигнал V релейного звена 1 1 значительно превьплает его зону нечувствительности. При этом на вы-- ходе релейного звена 11 формируется сигнал а, определяющий ускорение на участке 1-2 (фиг. 1). По мере нарастания скорости движения рассогласование V уменьшается и при лУг выходной сигнал релейного звена И становятся равным нулю, т.е. участок ускорения 1-2 заканчивается. На участке 2-3 (фиг. 1) стабилизации скорости релейное звено 11 формирует сигналы a.t, О или -а в .зависимости от величины и знака рассогласования ДУ. Переход на участок 3-4 (фиг.1) замедления осуществляется по сигналу путевого датчика 22 или по инициативному сигналу с пульта оператора. При этом управляющий ЭВМ 24 формируется входной сигнал , рассогласование & V имеет отрицательный знак и релейное звено 10 формирует отрицательную величину ускорения которая отрабатывается объектом 25 управления до того момента, пока величина рассогласования 4V не станет меньше зоны нечувствительности релейного звена 11, а значение .
В режимах ускорения, замедления и стабилизации скорости коммутирующий элемент 19 замкнут, а коммутирующие элементы 20, 21 разомкнуты
82
и сигнал Vy на выходе третьего блока 9 сравнения поступает через блок 10 сравнения на вход объекта 25 управления, осуществляя заданное оператором посредством управляющей ЭВМ 24 шш с пульта изменение скорости тележки в соответствии с законом управления. Одновременно сигнал V,. передается в память управляющей ЭВМ 24,что необходимо для формирования режима точного позиционирования. С учетом передаточных функций объекта управления и названных элементов 9-12, 14 уравнение движения тележки как управляемой системы имеет вид
гаа+СКр ы,а+СКо , (4)
где m - масса судовозной тележки;
С - жесткость привода движителя; Кд(. - коэффициент передачи привода движителя по управляющему
воздействию.
Названное условие апериодичности имеет вид
Ы.4т
СК
(5)
И
При достижении точки 4 (фиг. 1) по сигналу путевого датчика 23 осуществляется переход на режим точного позиционирования. При этом размыкается коммутирующий элемент 19 и замыкаются коммутирующие элементы 20 и 21. В дальнейшем в данном цикле движения на вход четвертого блока 9 сравнения подается постоянный сигнал , зафиксированный в памяти управляющей ЭВМ 24 в момент перехода к описываемому режиму. Отрицательная обратная связь по проходимому тележкой пути формируется путем интегрирования сигнала V на выходе датчика 6 во втором интегрирующем звене 13 с коэффициентом усиления (yjj, задаваемым вторым пропорциональным звеном 15 и определяющим интенсивность замедления, и подается на другой вход четвертого блока 1 О сравнения.
Для обеспечения устойчивости процесса позиционирования полученную на выходе четвертого блока 10 сравнения разность сигналов корректируют подавая на третий вход блока 10 сравнения обратную связь по второй производной, которая формируется во вто- ром дифференцирующем звене 18 с коэффициентом усиления oiv, задаваемым третьим пропорциональным звеном 16, При oi,
m
СКо,
Ч
влияние инерY УЧ
гп
ционной массы тележки компенсируется коррекцией и уравнение управляемой системы принимает вид
х-ьк,,. (6)
Согласно этому уравнению скорость тележки будет уменьшаться по экспоненте до нуля. При этом путь 5 про- йденй,1Й тележкой в режиме позиционирования , равен
(7 04
Величина Х., определяет выбор места установки путевого датчика 23 относительно заданной точки остановки тележки.
I Непрерывное управление по разности заданного и измеренного текущего значений скорости судовозной тележки путем последующего формирования реленой характеристики, вычитания из нее текущего значения ускорения с интегрированием и коррекцией результата и подачей его на вход органа управления насосом гидрообъемного привода движения позволяет на участках уско- рения и замедления обеспечить заданную, определяемую ординатой релейной характеристики, величину положительного или отрицательного ускорени при задании приводу движителя скорое ти, отличной от ее текущего значения .а на участке стабилизированной скорости позволяет снизить энергозатрат связанные с процессом ее стабилизации. При этом необходимая точность стабшшзахщи скорости обеспечивается выбором соответствующей зоны нечувствительности релейной характеристики.
Непрерывное управление гидрообъем ным приводом движителя с обратной свзью по пути На участке точного позиционирования позволяет существенно уменьшить зависимость конечного положения в процессе позиционироваш1я судоводной тележки от изменения параметров тележки, привода ее движителя и изменения внешних воздействий, а также обеспечить независимость про-. даоса позиционирования от свойств человека-оператора как звена системы управления. Тем самым уменьшается и напряженность работы оператора, улучшаются условия его труда.
.
ю 5.
20
2530 35 , , 40
45 50gg 1826
Формула изо б р е т е н и я
. Способ управления гидрообъемным приводом движителя судовозной тележки наклонного судоподъемника, при котором непрерьшно определяют координату положения и скорость движения для формирования обратных связей по координате положения, скорости, ускорению и первой производной по ускорению, на участках ус орения, стабилизированной скорости и замедления определяют рассогласование заданного и измеренного текущего значения скорости и на участках ускорения и замедления непрерывно с заданной ско- ростью изменяют значение сигнала управления подачей насоса на участке стабилизированной скорости оставляют его постоянным, на участке точного позицирования доводят до значения, соответствующего нулевой скоростиj отличающийся тем, что, с целью повышения эффективности путем увеличения точности определения позиции тележки, определяют значение ускорения путем дифференцирования текущего значения скорости, по значению рассогласования заданного и измеренного значения скорости формируют релейную характеристику с ординатой , равной заданному значению ускорения в зависимости от знака рассогласования , вычитают текущее значение ускорения , результат интегрируют, корректируют и запоминают, причем на участках ускорения, стабилизированной скорости и замедления полученным сигналом управляют непосредственно подачей насоса, на участке точного позицирования из запомненного при подходе к данному участку значения сигнала вычитают значение -сигнала, пропорционального измеренному текущему значению координаты положения на этом участке, корректируют полученную разность сигналов и результирующей величиной сигнала управляют подачей насоса.
2. Устройство для управления гидрообъемным приводом движителя судовозной тележки наклонного судоподъемника , содержащее по меньшей мере один регулируемый насос с органом управления его подачей, гидродвигатели, датчик скорости тележки, отличающееся тем, что,с целью повыше-- ния эффективности, путем увеличения
точности определения позиции тележки оно снабжено тремя последовательно включенными блоками сравнения, блоком суммирования с тремя входами, двумя пропорциональными звеньями, дифференцируюгалм звеном, двумя коммутирующими элементами, двумя путевыми датчиками и блоком управления, причем выход датчика скорости подключен в виде отрицательной обратной связи к одному на входов каждого блока сравнения и блока суммирования, причем к входу первого из блоков сравнения - непосредственно, входу второ го блока сравнения - через дифференцирующее звено, входу третьего блока сравнения - через последовательно соединенное с дифференцируюпщм звено первое из пропорциональных звеньев и к входу блока суммирования - через, соединенные последовательно второе из интегрирующих и второе из пропорциональных звеньев и второй из коммутирующих элементов, другой из упо-
мянутых входов первого из блоков сравнения связан с выходом блока управления, второго из блоков сравнения - с выходом релейного звена, третьего - с выходом первого из интегрирующих звеньев, другой вход блока суммирования соединен через второй из коммутирующих элементов с выходом третьего блока сравнения, выход блока суммирования связан по меньшей мере с одним из органов управления пода- . .чей насоса.
3. Устройство по п. 2, отличающееся тем, что оно дополнительно содержит второе диферен- циальное звено, третье пропорциональное звено и третий коммутирующий элемент, при этом третий вход блока суммирования связан через последовательно соединенные второе дифференцирующее звено, третье пропорциональное звено и третий коммутирующий элемент с выходом первого дифференцирующего звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система позиционного управления электроприводом | 1985 |
|
SU1312521A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ НЕПРИНУДИТЕЛЬНЫМ ОХЛАЖДЕНИЕМ ЭЛЕКТРОНАГРЕВАТЕЛЯ ПЕЧИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2422868C1 |
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2403608C1 |
| Устройство для программного замораживания биообъектов | 1987 |
|
SU1455184A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КРЕНОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2006 |
|
RU2326788C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| Копировальное устройство | 1978 |
|
SU887127A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ ТЕМПЕРАТУРОЙ ЭЛЕКТРОНАГРЕВАТЕЛЯ ПЕЧИ С РЕЖИМАМИ НАГРЕВ - СТАБИЛИЗАЦИЯ ТЕМПЕРАТУРЫ - ОХЛАЖДЕНИЕ | 2009 |
|
RU2422869C1 |
Изобретение относится к тран спортировке судов из одного бьефа реки в другой через гребень плотины, в частности к управлению гидрообъемным приводом движителя судовозной тележки наклонного судоподъемника. Цель изобретения - повьпиение эффективности путем увеличения точности определения позиции тележки. Предложен способ управления, по которому определяют текущее значение ускорения для формирования обратной связи и формируют алгоритм управления таким образом, что на участках ускорения, стабилизированной скорости и замедления определяют разность заданного- и измеренного текущего значений скорости, по значению этой разности формируют релейную характеристику, вычитают из нее текущее значение ускорения, результат интегрируют, корректируют и подают на вход органа управления подачей насоса. На участке точного позиционирования значение сигнала на входе органа управления подачей насоса, полученное при подходе к этому участку, запоминают, из него вычитают измеренное текущее значение пути на этом участке, корректируют полученную величину и результирующую величину подают на вход органа управления подачей насоса. Применение предлагаемого способа позволит повысить точность позиционирования тележки, снизить энергозатраты и улучшить условия труда оператора, 2 с. и I з.п. ф-лы, 2 ил.о i (Л 4 4 4ii 00 ND
Уз
Ф(€.2
| Сергеев Н.Н., Дворжняк Н.А | |||
| Гидроприводы судоподъемника | |||
| - В кн.: Вопросы проектирования и строительства судоподъемника Красноярской ГЭС | |||
| Труды Гидропроекта им | |||
| С.Я | |||
| Жука, М., 1987, № 62, с | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
