Заявляемое изобретение относится к области автоматического управления креном высокоманевренного самолета, в частности, к системам управления самолетом, реализующим режимы "наведения" от управляющего комплекса.
Известны системы автоматического управления углом крена самолета, позволяющие обеспечить управление в боковой плоскости. Подобные системы описаны, в частности, в патентах RU 2096263, В64С 13/18, публ. от 1997.11.20; RU 2272747, В64С 13/18, публ. от 2005.11.20; в авторском свидетельстве SU 365689, G05D 1/08 публ. от 2005.07.27. и в книге Михалева И.А., Окоемова Б.Н., Чикулаева М.С. Системы автоматического управления самолетом - М.: Машиностроение, 1987, с.208-211.
К недостаткам известных систем автоматического управления креном самолета следует отнести тот факт, что они не обеспечивают требуемых маневренных характеристик самолета во всем диапазоне ±360° углов крена самолета. Это связано с тем, что известные системы всегда осуществляют управление креном самолета таким образом, чтобы боковое движение самолета происходило в направлении, приводящем к уменьшению рассогласования между текущим и заданным значениями угла крена.
Однако, при значениях данного рассогласования, по абсолютной величине больших 180°, целесообразнее изменить направление вращения самолета в противоположную сторону и тем самым уменьшить время управления и повысить маневренность самолета. Кроме того, в известных системах датчики, измеряющие угол крена самолета, определяют его в диапазоне ±180°, в результате чего в системе имеет место скачкообразное изменение сигнала со значения, соответствующего +180°, на значение, соответствующее -180°, либо со значения, соответствующего -180°, на значение, соответствующее +180°, что делает систему без специально принятых мер неработоспособной.
Наиболее близкой по технической сущности к заявляемой системе является система автоматического управления креном самолета, представленная в книге Михалева И.А., Окоемова Б.Н., Чикулаева М.С. Системы автоматического управления самолетом - М.: Машиностроение, 1987, с.208-211. Данная система содержит последовательно соединенные задатчик угла крена, фильтр низких частот, первый сумматор, интегрирующее устройство, второй сумматор, передаточное звено и третий сумматор, ко вторым входам первого и второго сумматоров подключен датчик угла крена, ко второму входу третьего сумматора подключен датчик угловой скорости крена.
Недостатком известной системы автоматического управления креном высокоманевренного самолета является то, что при рассогласованиях между текущим и заданным значениями угла крена, по абсолютной величине больших 180°, управление осуществляется таким образом, чтобы боковое движение самолета происходило в направлении уменьшения данного рассогласования. Однако, изменив направление движения самолета, можно существенно уменьшить время переходного процесса и тем самым улучшить маневренные характеристики самолета. Кроме того, при использовании на маневренном самолете типа СУ-35 датчика угла крена с диапазоном измерения ±180° в системе возникает скачкообразное изменение сигнала со значения, соответствующего +180°, на значение, соответствующее -180°, либо со значения, соответствующего -180°, на значение, соответствующее +180°, что приводит без специально принятых мер к неработоспособности известной системы. Помимо этого, при больших управляющих воздействиях в виде сигнала заданного угла крена в переходном процессе, имеющем место в системе самолет - САУ, перерегулирование по координате управления превышает допустимое значение для высокоманевренных самолетов типа СУ-35. Большое перерегулирование связано с тем, что в системе отсутствуют устройства, динамически ограничивающие величину управляющего сигнала на входе привода. Без данных устройств уровень входного сигнала таков, что привод бокового канала выходит на предельные значения, а это эквивалентно размыканию системы по сигналам обратных связей, обеспечивающих требуемое качество переходных процессов.
Целью изобретения является устранение указанных недостатков, повышение маневренных возможностей высокоманевренного самолета за счет уменьшения времени управления движением по крену.
Данная цель достигается тем, что в систему, содержащую задатчик угла крена, датчики угла крена и угловой скорости крена, первый и второй сумматоры, ко вторым входам которых подключен выход датчика угла крена, третий сумматор и интегрирующее устройство, дополнительно введены последовательно соединенные блок выделения модуля, первое устройство сравнения и первый блок коммутации, последовательно соединенные устройство определения знака и множительное устройство, выход которого подключен ко второму входу первого блока коммутации, последовательно соединенные инвертор, четвертый сумматор, второй блок коммутации и запоминающее устройство, последовательно соединенные дифференцирующее устройство и второе устройство сравнения, выход которого подключен ко второму входу второго блока коммутации, а также пятый сумматор, третье устройство сравнения и устройство «чистое запаздывание», причем первый вход первого сумматора соединен с выходом задатчика угла крена, а выход подключен к входам блока выделения модуля, устройства определения знака и первому входу третьего сумматора, второй вход которого соединен с выходом первого блока коммутации, а выход подключен к входу интегрирующего устройства и к первому входу второго сумматора, к третьему входу которого подключен датчик угловой скорости крена, первый вход инвертора соединен с выходом интегрирующего устройства, подключенным к первому входу пятого сумматора, второй вход инвертора соединен с выходом второго сумматора, подключенным ко второму входу пятого сумматора, вход дифференцирующего устройства соединен с выходом датчика угла крена, а выход запоминающего устройства подключен к третьему входу пятого сумматора, выход которого является выходом системы и подключен к входам третьего устройства сравнения и устройства «чистое запаздывание», выходы которых подключены ко вторым входам соответственно интегрирующего устройства и четвертого сумматора.
Сущность изобретения поясняется чертежом, на котором представлена блок-схема предлагаемой системы автоматического управления креном маневренного самолета. Данная система содержит задатчик 1 угла крена, датчик 2 угла крена и датчик 3 угловой скорости крена, первый, второй и третий сумматоры 4, 5 и 6, интегрирующее устройство 7, последовательно соединенные блок 8 выделения модуля, первое устройство 9 сравнения и первый блок 10 коммутации, последовательно соединенные устройство 11 определения знака и множительное устройство 12. Система содержит также последовательно соединенные инвертор 13, четвертый сумматор 14, второй блок 15 коммутации и запоминающее устройство 16, последовательно соединенные дифференцирующее устройство 17 и второе устройство 18 сравнения. Кроме того, система содержит пятый сумматор 19, третье устройство 20 сравнения и устройство 21 «чистое запаздывание».
Сигналы γз и γд с выходов задатчика 1 угла крена и датчика 2 угла крена поступают соответственно на первый и второй входы первого сумматора 4. Сигнал Δγ рассогласования между текущим и заданным значениями угла крена подается на входы блока 8 выделения модуля и блока 11 определения знака. Сигнал с выхода блока 8 выделения модуля через устройство 9 сравнения, осуществляющее сравнение сигналов, соответствующих абсолютной величине Δγ и величине угла крена 180°, поступает на первый вход блока 10 коммутации, на второй вход которого поступает сигнал с выхода множительного устройства 12, на первый вход которого подается сигнал с выхода устройства 11 определения знака, а на второй вход сигнал, соответствующий углу крена -360°. Таким образом, если абсолютная величина сигнала Δγ больше величины, соответствующей 180°, то на выходе блока 10 коммутации формируется сигнал, соответствующий -360°×signΔγ, в противном случае - сигнал равен нулю. Данный сигнал поступает на второй вход сумматора 6, на первый вход которого поступает сигнал Δγ с выхода сумматора 4. На выходе сумматора 6 формируется сигнал Δγ, если его абсолютная величина меньше значения, соответствующего 180° угла крена, или сигнал, соответствующий -360°×signΔγ, если данная величина больше значения, соответствующего 180°. Сигнал с выхода сумматора 6 через интегрирующее устройство 7 поступает на первый вход сумматора 19. Отметим, что с помощью управляющего сигнала на выходе сумматора 6 предоставляется возможность определять направление движения самолета по крену в зависимости от абсолютной величины рассогласования между текущим и заданным значениями угла крена. Сигналы управления движением самолета по крену с выходов датчика 2 угла крена и датчика 3 угловой скорости крена подают соответственно на второй и третий входы сумматора 5, на первый вход которого, для повышения быстродействия в системе, подают сигнал с выхода сумматора 6. Сигнал с выхода сумматора 5 подается в качестве одного из сигналов управления на второй вход сумматора 19.
Введение в управляющий сигнал, поступающий на вход привода бокового канала, помимо сигнала, соответствующего интегралу рассогласования между текущим и заданным значениями угла крена, непосредственно сигнала рассогласования Δγ позволяет получить в передаточной функции W(γ/γзад) управляемый «нуль» и, выбрав коэффициент усиления по данному сигналу, увеличить быстродействие в системе.
Ранее отмечалось, что в системе имеет место скачкообразное изменение сигнала датчика 2 угла крена со значения, соответствующего +180°, на значение, соответствующее -180°, либо со значения, соответствующего -180°, на значение, соответствующее +180°, что делает систему без специально принятых мер неработоспособной. Для устранения данного недостатка системы сигнал с выхода сумматора 5 подается на второй вход инвертора 13, на первый вход которого поступает сигнал с выхода интегрирующего устройства 7. Сигнал с выхода инвертора 13 подается на первый вход сумматора 14, на второй вход которого подается сигнал с сумматора 19, пропущенный через устройство 21 "чистое запаздывание", на выходе которого формируется сигнал, соответствующий сигналу на выходе сумматора 19, с небольшим запаздыванием по времени. Сигнал с выхода датчика 2 угла крена подается через дифференцирующее устройство 17 и устройство сравнения 18 на второй вход блока 15 коммутации. Таким образом, при скачкообразном изменении сигнала датчика 2 угла крена производная на выходе дифференцирующего устройства 17 будет бесконечно большим числом со знаком + или -, и с выхода устройства 18 сравнения поступит сигнал, с помощью которого блок 15 коммутации подключит выход сумматора 14 через запоминающее устройство 16 к третьему входу сумматора 19. Сформированный с помощью запоминающего устройства 16 постоянный сигнал компенсирует скачкообразное изменение сигнала датчика 2 угла крена и на выходе сумматора 19 формируется сигнал управления, поступающий на привод бокового канала, причем его значение сохраняется постоянным до и после скачкообразного изменения сигнала датчика 2 угла крена. Кроме того, сигнал с выхода сумматора 19, на котором формируется управляющий сигнал для привода бокового канала, через устройство 20 сравнения подается на второй вход интегрирующего устройства 7 и в случае, если управляющий сигнал больше располагаемого перемещения привода бокового канала от сигналов САУ, то на второй вход интегрирующего устройства 7 подается с большим коэффициентом усиления сигнал "обратной связи", динамически ограничивающий величину выходного сигнала сумматора 19.
Как показали результаты моделирования комплексной системы управления КСУ-35 для высокоманевренного самолета СУ-35, при использовании предлагаемой системы автоматического управления креном самолета обеспечиваются удовлетворительные характеристики управления во всем диапазоне изменения углов крена самолета ±360°. Существенно уменьшилось время управления за счет введения устройств, определяющих и обеспечивающих направление вращения самолета. Ликвидирована реакция объекта управления на скачки сигнала с датчика угла крена. Повысилось быстродействие системы самолет - САУ, за счет дополнительного введения в управляющий сигнал, поступающий на привод бокового канала, непосредственно сигнала рассогласования между текущим и заданным значениями угла крена. Благодаря введению динамического ограничения управляющего сигнала, существенно уменьшилось перерегулирование переходных процессов, возникающих в системе самолет - САУ при больших значениях заданного угла крена.
Таким образом, предлагаемая система управления реализуема и применима для высокоманевренного самолета типа СУ-35.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2006 |
|
RU2325305C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА | 1995 |
|
RU2084375C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2373111C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2459230C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2446429C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2380279C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2007 |
|
RU2340510C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383467C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383466C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1991 |
|
SU1840700A1 |
Изобретение относится к области управления пространственным маневрированием самолета. Система автоматического управления (САУ) креном самолета содержит задатчик угла крена, датчики угла крена и угловой скорости крена, первый и второй сумматоры, связанные с датчиком угла крена, третий сумматор и интегрирующее устройство. Дополнительно в САУ введены последовательно соединенные блок выделения модуля, первые устройство сравнения и блок коммутации, последовательно соединенные устройство определения знака и множительное устройство, выход которого подключен ко второму входу первого блока коммутации. В САУ также введены последовательно соединенные инвертор, четвертый сумматор, второй блок коммутации и запоминающее устройство, последовательно соединенные дифференцирующее устройство и второе устройство сравнения, выход которого подключен ко второму входу второго блока коммутации, а также пятый сумматор, третье устройство сравнения и устройство «чистое запаздывание». Один из входов первого сумматора соединен с выходом задатчика угла крена, а выход подключен к входам блока выделения модуля, устройства определения знака и первому входу третьего сумматора. Второй вход последнего соединен с выходом первого блока коммутации, а выход подключен к первому входу интегрирующего устройства и к соответствующему входу второго сумматора, еще один вход которого связан с датчиком угловой скорости крена. Первый вход инвертора соединен с выходом интегрирующего устройства, подключенным к первому входу пятого сумматора. Второй вход инвертора соединен с выходом второго сумматора, подключенным ко второму входу пятого сумматора. Вход дифференцирующего устройства соединен с выходом датчика угла крена. Выход запоминающего устройства подключен к третьему входу пятого сумматора, выход которого является выходом САУ и подключен к входам третьего устройства сравнения и устройства «чистое запаздывание», выходы которых подключены ко вторым входам соответственно интегрирующего устройства и четвертого сумматора. САУ индифферентна к скачкообразным изменениям сигнала датчика угла крена. Присутствие в сигнале, управляющем приводом бокового канала, непосредственно сигнала рассогласования между текущим и заданным значениями угла крена, а также интеграла от данного сигнала обеспечивает повышение быстродействия САУ. Динамическое ограничение управляющего сигнала снижает перерегулирование в переходных процессах. 1 ил.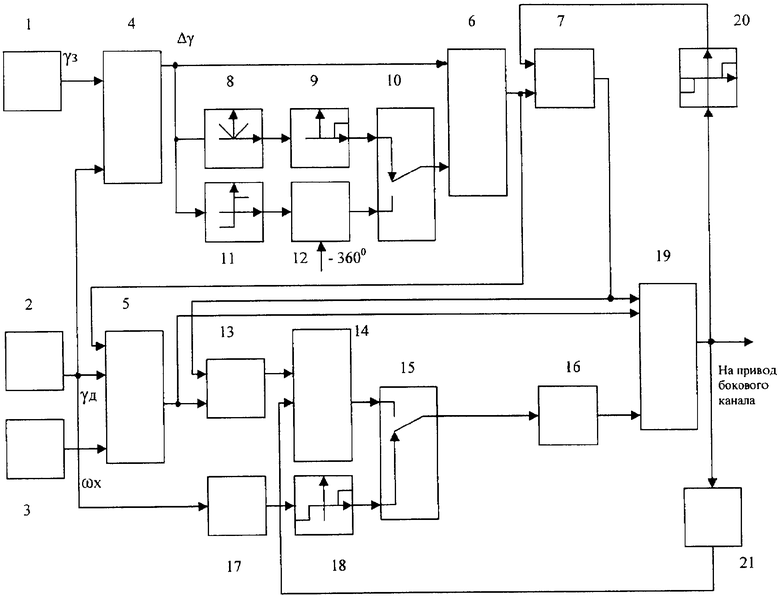
Система автоматического управления креном высокоманевренного самолета, содержащая задатчик угла крена, датчики угла крена и угловой скорости крена, первый и второй сумматоры, ко вторым входам которых подключен выход датчика угла крена, третий сумматор и интегрирующее устройство, отличающаяся тем, что в нее дополнительно введены последовательно соединенные блок выделения модуля, первое устройство сравнения и первый блок коммутации, последовательно соединенные устройство определения знака и множительное устройство, выход которого подключен ко второму входу первого блока коммутации, последовательно соединенные инвертор, четвертый сумматор, второй блок коммутации и запоминающее устройство, последовательно соединенные дифференцирующее устройство и второе устройство сравнения, выход которого подключен ко второму входу второго блока коммутации, а также пятый сумматор, третье устройство сравнения и устройство "чистое запаздывание", причем первый вход первого сумматора соединен с выходом задатчика угла крена, а выход подключен к входам блока выделения модуля, устройства определения знака и первому входу третьего сумматора, второй вход которого соединен с выходом первого блока коммутации, а выход подключен к первому входу интегрирующего устройства и к первому входу второго сумматора, к третьему входу которого подключен датчик угловой скорости крена, первый вход инвертора соединен с выходом интегрирующего устройства, подключенным к первому входу пятого сумматора, второй вход инвертора соединен с выходом второго сумматора, подключенным ко второму входу пятого сумматора, вход дифференцирующего устройства соединен с выходом датчика угла крена, а выход запоминающего устройства подключен к третьему входу пятого сумматора, выход которого является выходом системы и подключен к входам третьего устройства сравнения и устройства "чистое запаздывание", выходы которых подключены ко вторым входам соответственно интегрирующего устройства и четвертого сумматора.
| Михалев И.А | |||
| и др | |||
| Системы автоматического управления самолетом | |||
| - М.: Машиностроение, 1987, с.208-211 | |||
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2096263C1 |
| АДАПТИВНЫЙ АВТОПИЛОТ УГЛА КРЕНА | 2004 |
|
RU2272747C2 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕГКОГО САМОЛЕТА | 2000 |
|
RU2176812C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2262730C1 |

