&
(Л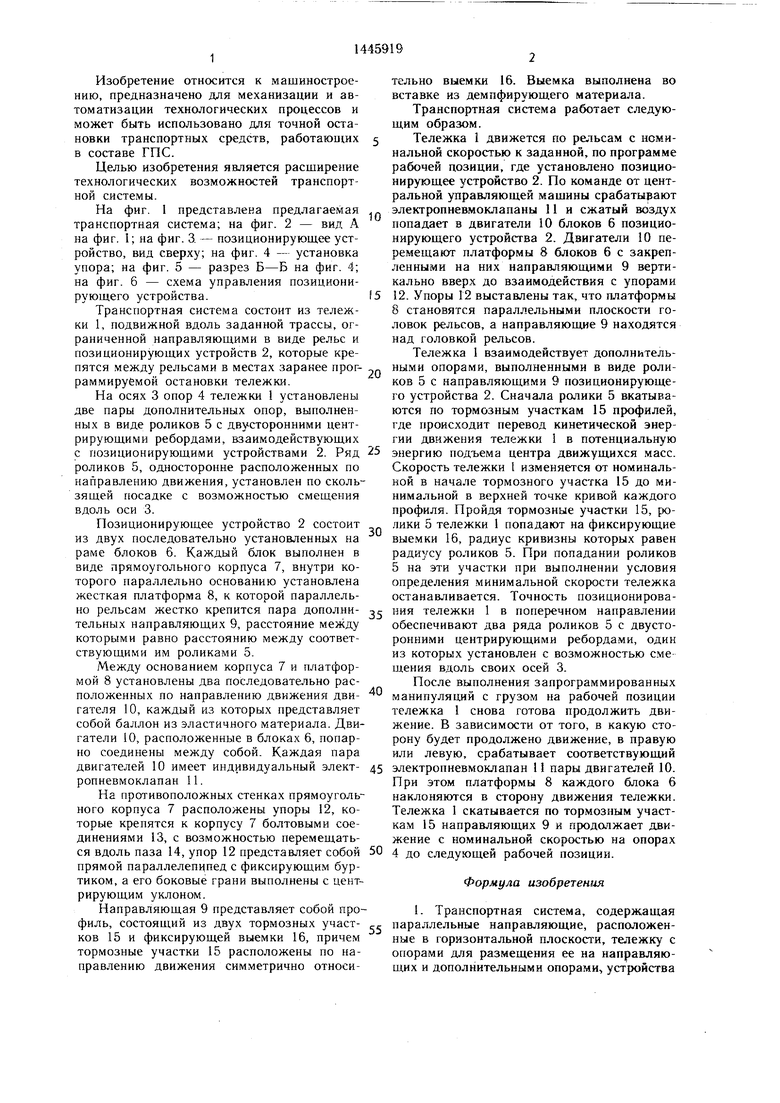
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСОКОСКОРОСТНАЯ ТРАНСПОРТНАЯ СИСТЕМА, ПОЛАЯ ХОДОВАЯ БАЛКА (ВАРИАНТЫ), ХОДОВАЯ ТЕЛЕЖКА (ВАРИАНТЫ), ПОДВИЖНОЙ СОСТАВ (ВАРИАНТЫ) | 2011 |
|
RU2494897C2 |
| УСТРОЙСТВО ПУТИ ДЛЯ АВТОМАТИЧЕСКОЙ ТРАНСПОРТНОЙ СЕТИ | 2007 |
|
RU2380248C2 |
| МАГНИТОПЛАН | 2017 |
|
RU2653986C1 |
| ТЕЛЕЖКА ГРУЗОВОГО ВАГОНА И ГРУЗОВОЙ ВАГОН | 2010 |
|
RU2514982C2 |
| Монорельсовая транспортная система | 1984 |
|
SU1311972A1 |
| ТЕЛЕЖКА С ИЗМЕНЯЕМОЙ ШИРИНОЙ КОЛЕИ, УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ ШИРИНЫ КОЛЕИ И СПОСОБ ИЗМЕНЕНИЯ ШИРИНЫ КОЛЕИ | 2020 |
|
RU2803900C1 |
| СИСТЕМА ПОГРУЗКИ ГРУЗОВОГО АВТОМОБИЛЯ | 2019 |
|
RU2784834C2 |
| ТРАНСПОРТНАЯ СИСТЕМА ТЕЛЕЖЕЧНОГО ТИПА | 2008 |
|
RU2403201C1 |
| Устройство для перемещения единиц подвижного железнодорожного состава с заклиненной колесной парой | 2015 |
|
RU2607345C2 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО ТЕЛЕЖЕЧНОГО ТИПА | 2008 |
|
RU2450945C2 |
Изобретение относится к машинострое нию, предназначено для механизации и ав-, томатизации технологических процессов и может быть использовано для точной остановки транспортных средств, работающих в составе ГПС. Целью изобретения является расширение технологических возможностей транспортной системы. Тележка 1 движется по заданной программе к рабочей позиции. По команде от управляющей машины двигатели 10 перемещают платформу 8 с дополнительными направляющими 9 до взаимодействия с упорами. Дополнительные опоры тележки вкатываются по тормозным участкам 15 и попадают на фиксирующие выемки 16, где происходит остановка и позиционирование тележки. 3 з.п. ф-лы, 6 ил.
Z
i/Л. .
ю s
к
4;
4
сд
со
со
Фиг.1
Изобретение относится к машиностроению, предназначено для механизации и автоматизации технологических процессов и может быть использовано для точной остановки транспортных средств, работающих в составе ГПС.
Целью изобретения является расширение технологических возможностей транспортной системы.
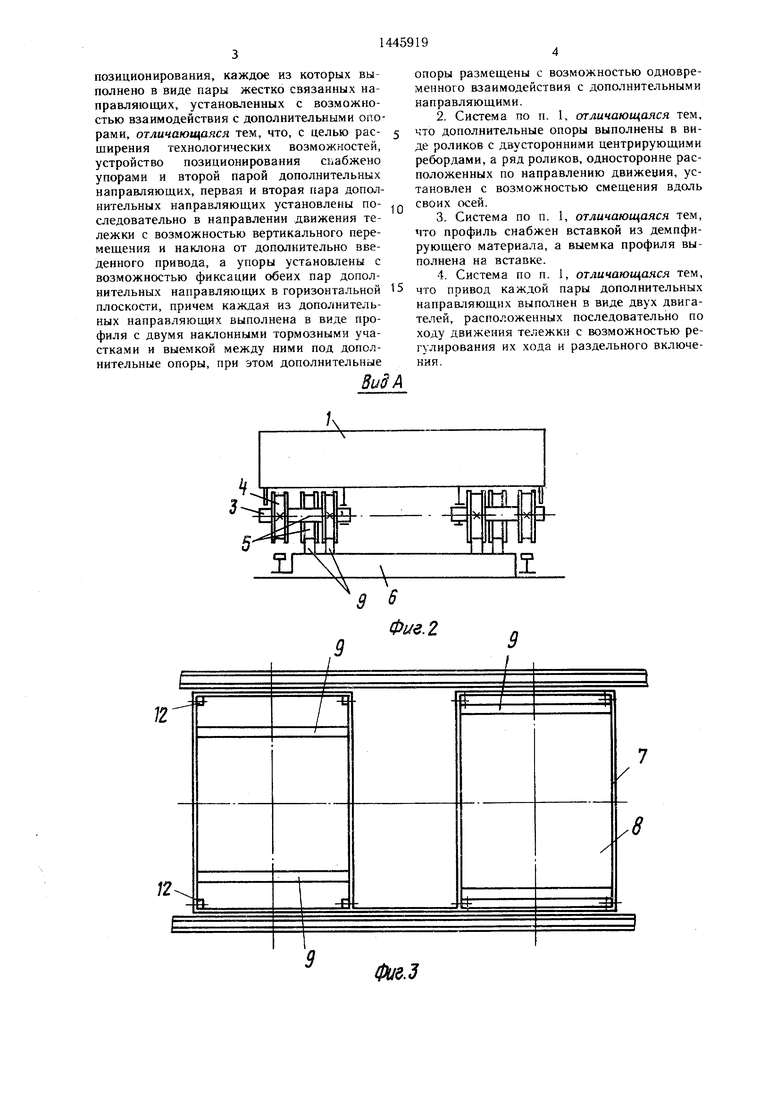
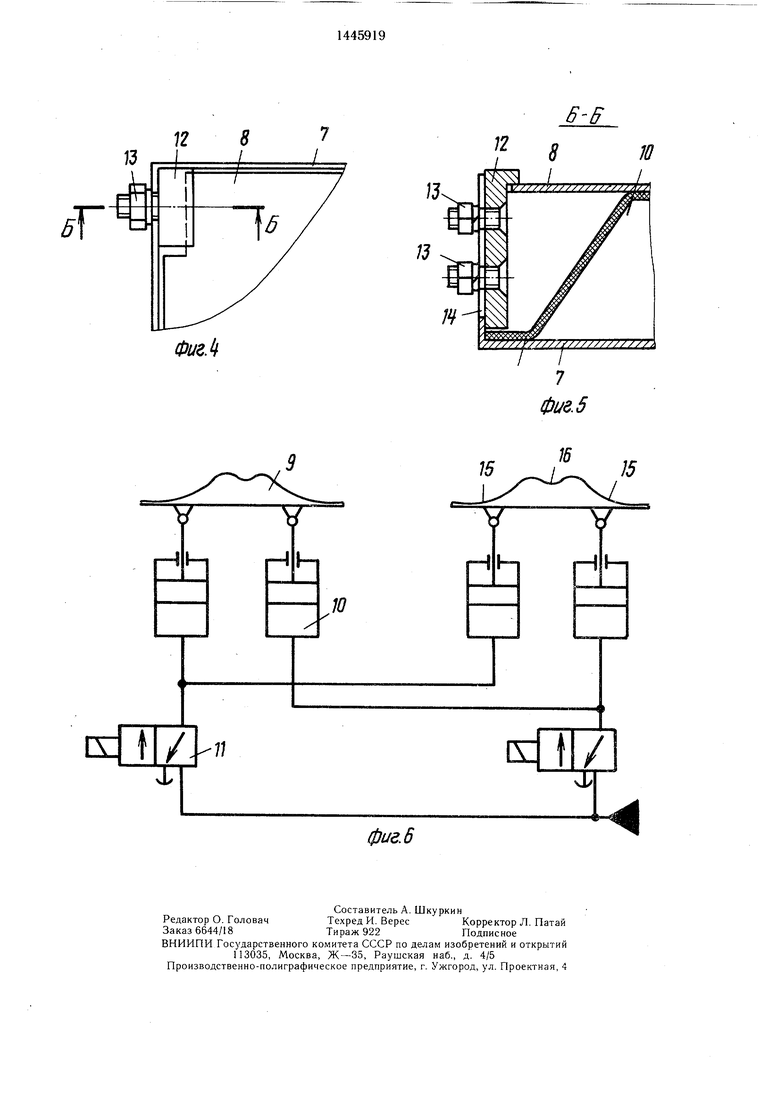
На фиг. 1 представлена предлагаемая транспортная система; на фиг. 2 - вид А на фиг. 1; на фиг. 3. - позиционирующее устройство, вид сверху; на фиг. 4 - установка упора; на фиг. 5 - разрез Б-Б на фиг. 4; на фиг. б - схема управления позиционирующего устройства.
Транспортная система состоит из тележки 1, подвижной вдоль заданной трассы, ограниченной направляющими в виде рельс и позиционирующих устройств 2, которые крепятся между рельсами в местах заранее программируемой остановки тележки.
На осях 3 опор 4 тележки 1 установлены две пары дополнительных опор, выполненных в виде роликов 5 с двусторонними центрирующими ребордами, взаимодействующих с позиционирующими устройствами 2. Ряд роликов 5, односторонне расположенных по направлению движения, установлен по скользящей посадке с возможностью смещения вдоль оси 3.
Позиционирующее устройство 2 состоит из двух последовательно установленных на раме блоков 6. Каждый блок выполнен в виде прямоугольного корпуса 7, внутри которого параллельно основанию установлена жесткая платформа 8, к которой параллельно рельсам жестко крепится пара дополнительных направляющих 9, расстояние между которыми равно расстоянию между соответствующими им роликами 5.
Между основанием корпуса 7 и платформой 8 установлены два последовательно расположенных по направлению движения двигателя 10, каждый из которых представляет собой баллон из эластичного материала. Двигатели 10, расположенные в блоках 6, попарно соединены между собой. Каждая пара двигателей 10 имеет индивидуальный элект- ропневмоклапан 11.
На противоположных стенках прямоугольного корпуса 7 расположены упоры 12, которые крепятся к корпусу 7 болтовыми соединениями 13, с возможностью перемещаться вдоль паза 14, упор 12 представляет собой прямой параллелепипед с фиксирующим буртиком, а его боковые грани выполнены с центрирующим уклоном.
Направляющая 9 представляет собой профиль, состоящий из двух тормозных участков 15 и фиксирующей выемки 16, причем тормозные участки 15 расположены по направлению движения симметрично относи0
5
0
5
0
5
0
5
0
5
тельно выемки 16. Выемка выполнена во вставке из демпфирующего материала.
Транспортная система работает следующим образом.
Тележка i движется по рельсам с номинальной скоростью к заданной, по программе рабочей позиции, где установлено позиционирующее устройство 2. По команде от центральной управляющей машины срабатырают электропневмоклапаны 11 и сжатый воздух попадает в двигатели 10 блоков 6 позиционирующего устройства 2. Двигатели 10 перемещают платформы 8 блоков 6 с закрепленными на них направляюшлми 9 вертикально вверх до взаимодействия с упорами 12. Упоры 12 выставлены так, что платформы 8 становятся параллельными плоскости головок рельсов, а направляющие 9 находятся над головкой рельсов.
Тележка 1 взаимодействует дополнительными опорами, выполненными в виде роликов 5 с направляющими 9 позиционирующего устройства 2. Сначала ролики 5 вкатываются по тормозным участкам 15 профилей, где происходит перевод кинетической энергии движения тележки I в потенциальную энергию подъема центра движущихся масс. Скорость тележки 1 изменяется от номинальной в начале тормозного участка 15 до минимальной в верхней точке кривой каждого профиля. Пройдя тормозные участки 15, ролики 5 тележки 1 попадают на фиксирующие выемки 16, радиус кривизны которых равен радиусу роликов 5. При попадании роликов 5 на эти участки при выполнении условия определения минимальной скорости тележка останавливается. Точность позиционирования тележки 1 в поперечном направлении обеспечивают два ряда роликов 5 с двусторонними центрирующими ребордами, один из которых установлен с возможностью с.ме щения вдоль своих осей 3.
После выполнения запрограммированных манипуляций с грузом на рабочей позиции тележка 1 снова готова продолжить движение. В зависимости от того, в какую сторону будет продолжено движение, в правую или левую, срабатывает соответствующий электропневмоклапан 11 пары двигателей 10. При этом платформы 8 каждого блока 6 наклоняются в сторону движения тележки. Тележка 1 скатывается по тормозным участкам 15 направляющих 9 и продаажает движение с номинальной скоростью на опорах 4 до следующей рабочей позиции.
Формула изобретешь
позиционирования, каждое из которых выполнено в виде пары жестко связанных направляющих, установленных с возможностью взаимодействия с дополнительными опорами, отличающаяся тем, что, с целью рас- ширения технологических возможностей, устройство позиционирования С11абжено упорами и второй парой дополнительных направляющих, первая и вторая пара дополнительных направляющих установлены по- следовательно в направлении движения тележки с возможностью вертикального перемещения и наклона от дополнительно введенного привода, а упоры установлены с возможностью фиксации обеих пар дополнительных направляющих в горизонтальной плоскости, причем каждая из дополнительных направляющих выполнена в вилТ.е профиля с двумя наклонными тормозными участками и выемкой между ними под дополнительные опоры, при этом дополнительные
8и
12
опоры размещены с возможностью одновременного взаимодействия с дополнительными направляющими.
9 S Фиг. 2
-W
т
a.J
ФигЛ
V
Е f /
7
Б-е
V
V
Е: f /
ч1/
фиг. 6
| Промышленный робот | 1978 |
|
SU732134A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
