Изобретение относится к машиностроению, & именно к промышленным роботам, предназначенным для механизации и автоматизации технологических процессов.
Наиболее близким к изобретению является промышленный робот, содержащий механическую руку, смонтированную на тележке, подвижной вдоль направляющих, и устройство базирования тележки 1.
Недостаток указанного робота заключается в том, что он сложен по конструкции вследствие необходимости применения дополнительного привода на подъем-опускание тележки.
Целью изобретения является упрощение конструкции робота.
Указанная цель достигается тем, что устройство базирования выполнено в виде дополнительных направляющих с заходными частями, а тележка снабжена дополнительными опорами, связанными с этим направляющим и, причем дополнительные направляющие смонтированы параллельно основным на расстоянии, меньшем межосевого расстояния основных и дополнительных опор тележки.
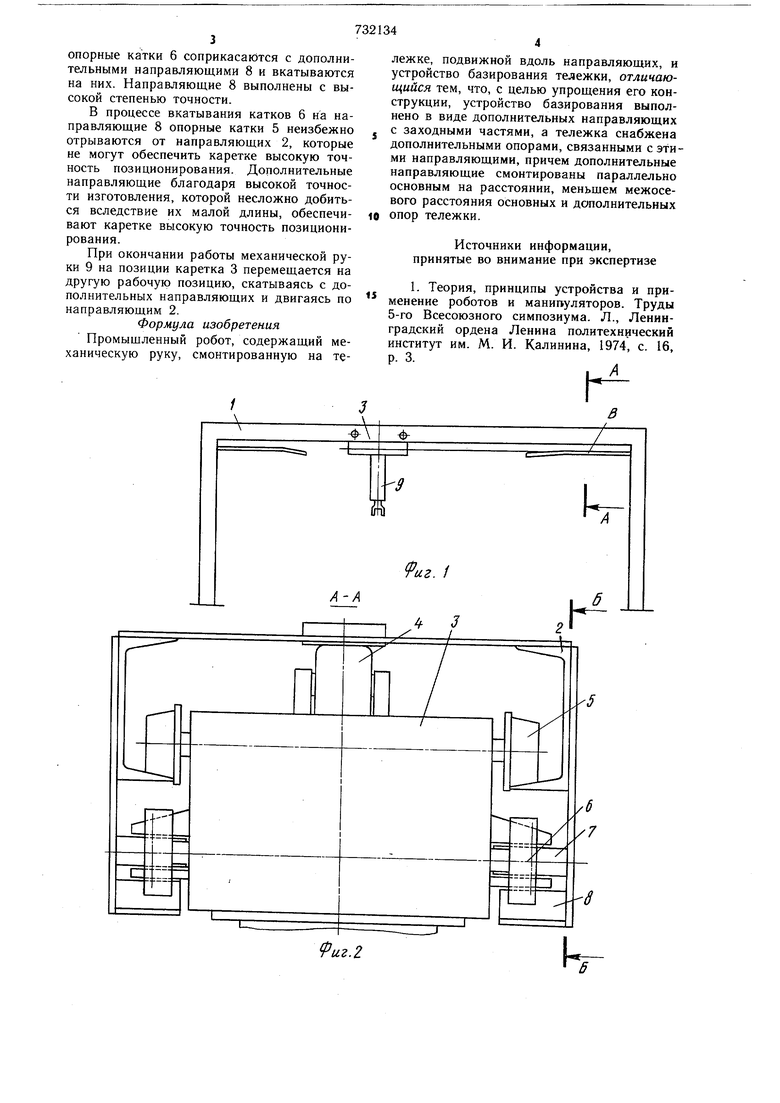
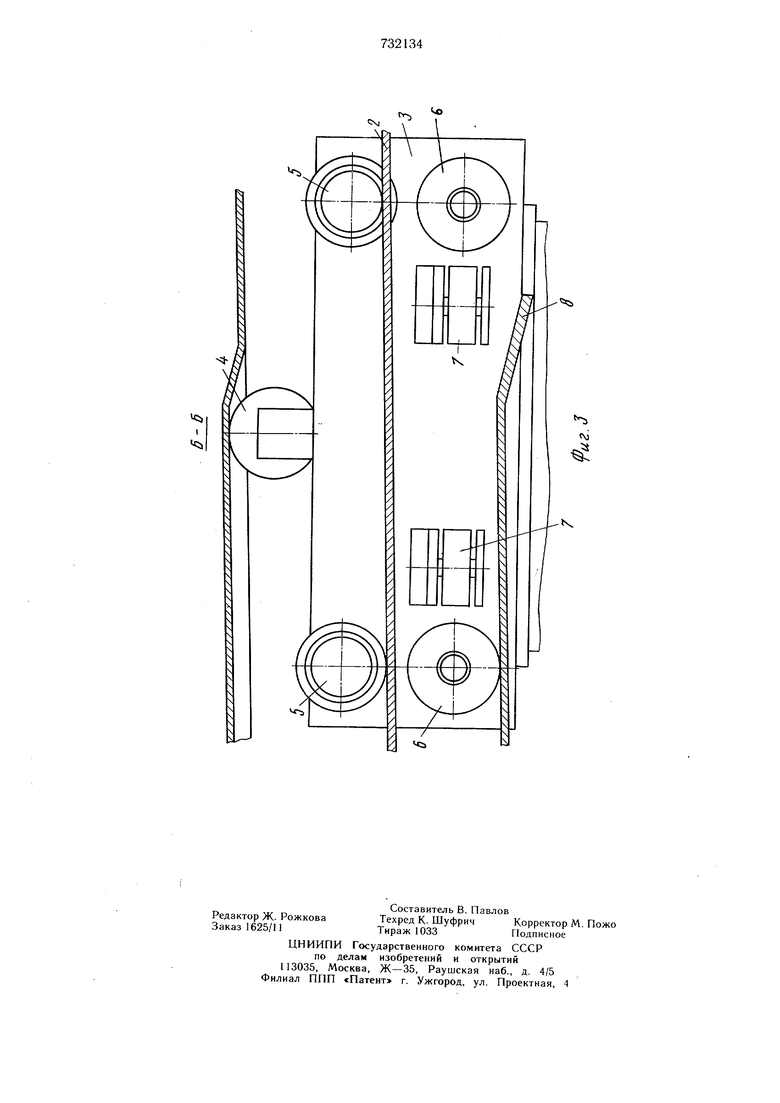
На фиг. 1 изображен промышленный робот, вид спереди; па фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
Промышленный робот содержит корпус 1 портального типа. Верхняя перекладина портала выполнена в виде направляющих 2, на которых установлена каретка 3, оборудованная приводным катком 4 и опорными катками 5. Кроме того, на каретке установлены дополнительные опорные катки 6 и направ10ляющие катки 7. На корпусе робота укреплены дополнительные направляющие 8, являющиеся устройством базирования тележки. Механическая рука 9 установлена в нижней части каретки.
Дополнительные направляющие 8 смон15тированы параллельно основным на расстоянии, меньшем межосевого расстояния между катками 5 и 6.
Промышленный робот работает следующим образом.
50
Каретка 3, снабженная механической рукой 9, перемещается по направляющим 2 корпуса 1. В тот момент, когда каретка подходит к рабочей позиции, дополнительные
опорные катки б соприкасаются с дополнительными направляющими 8 и вкатываются на них. Направляющие 8 выполнены с высокой степенью точности.
В процессе вкатывания катков 6 на направляющие 8 опорные катки 5 неизбежно отрываются от направляющих 2, которые не могут обеспечить каретке высокую точность позиционирования. Дополнительные направляющие благодаря высокой точности изготовления, которой несложно добиться вследствие их малой длины, обеспечивают каретке высокую точность позиционирования.
При окончании работы механической руки 9 на позиции каретка 3 перемещается на другую рабочую позицию, скатываясь с дополнительных направляющих и двигаясь по направляющим 2.
Формула изобретения
Промышленный робот, содержащий механическую руку, смонтированную на тележке, подвижной вдоль направляющих, и устройство базирования тележки, отличающийся тем, что, с целью упрощения его конструкции, устройство базирования выполнено в виде дополнительных направляющих с заходными частями, а тележка снабжена дополнительными опорами, связанными с этими направляющими, причем дополнительные направляющие смонтированы параллельно основным на расстоянии, меньшем межосевого расстояния основных и дополнительных опор тележки.
Источники информации, принятые во внимание при экспертизе
1. Теория, принципы устройства и применение роботов и манипуляторов. Труды 5-го Всесоюзного симпозиума. Л., Ленинградский ордена Ленина политехнический институт им. М. И. Калинина, 1974, с. 16, р. 3..
h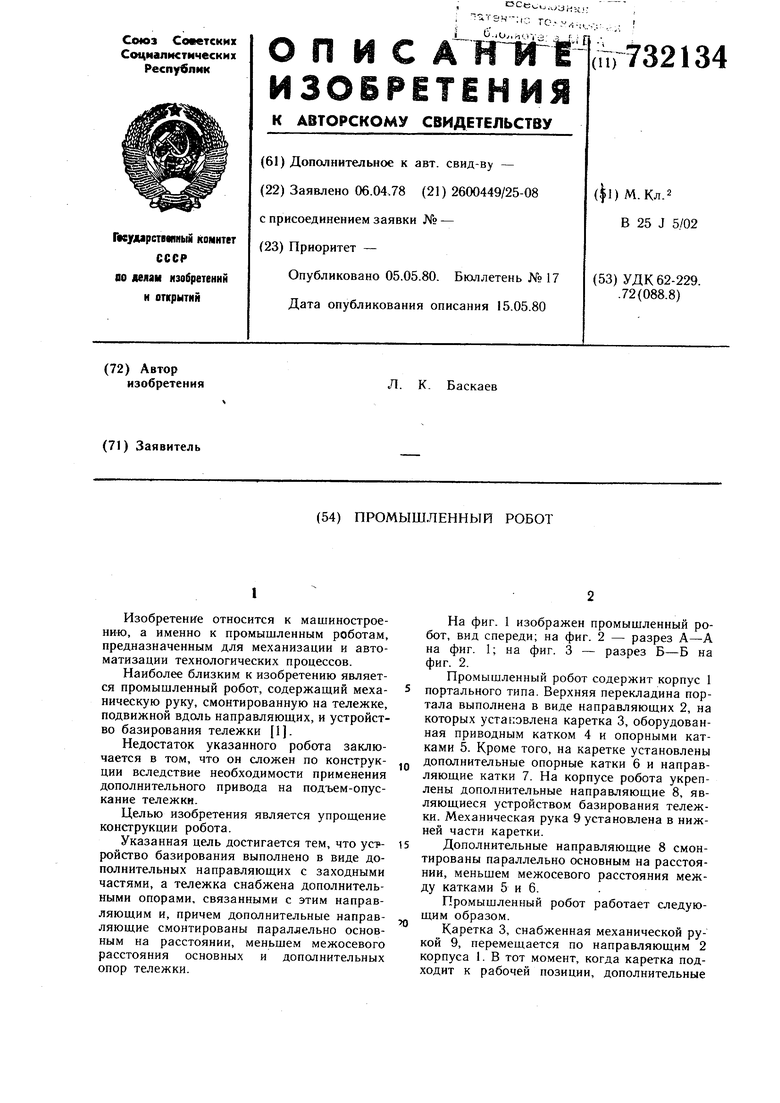
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль | 1988 |
|
SU1593915A1 |
| РОБОТ-МАНИПУЛЯТОР ДЛЯ ПОКРАСКИ ИЗДЕЛИЙ | 2003 |
|
RU2263020C2 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
| ТРУБОРЕЗ | 1999 |
|
RU2154555C1 |
| Автоматизированная линия для сборки и сварки коробчатых изделий | 1987 |
|
SU1581543A1 |
| Промышленный робот | 1978 |
|
SU861059A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Опорное устройство робота манипуляционного промышленного (варианты) | 2021 |
|
RU2756901C1 |
| Устройство для пакетирования штучных изделий | 1987 |
|
SU1654179A1 |
| Устройство для перегрузки конусов электронно-лучевых трубок с транспортера печи отжига | 1990 |
|
SU1839168A1 |
с::.
иг.2
-- :
Its
I
«i
-
«M
ч
