Ф
4 Од
сл
Изобретение относится к диагностированию транспортных машин,-в частности к средствам диагностирования агрегатов, обеспечивающих безопас- ность движения, и может быть приме- но при изготовлении и эксплуатации транспортных средств.
Целью изобретения является повышение точности измерений.
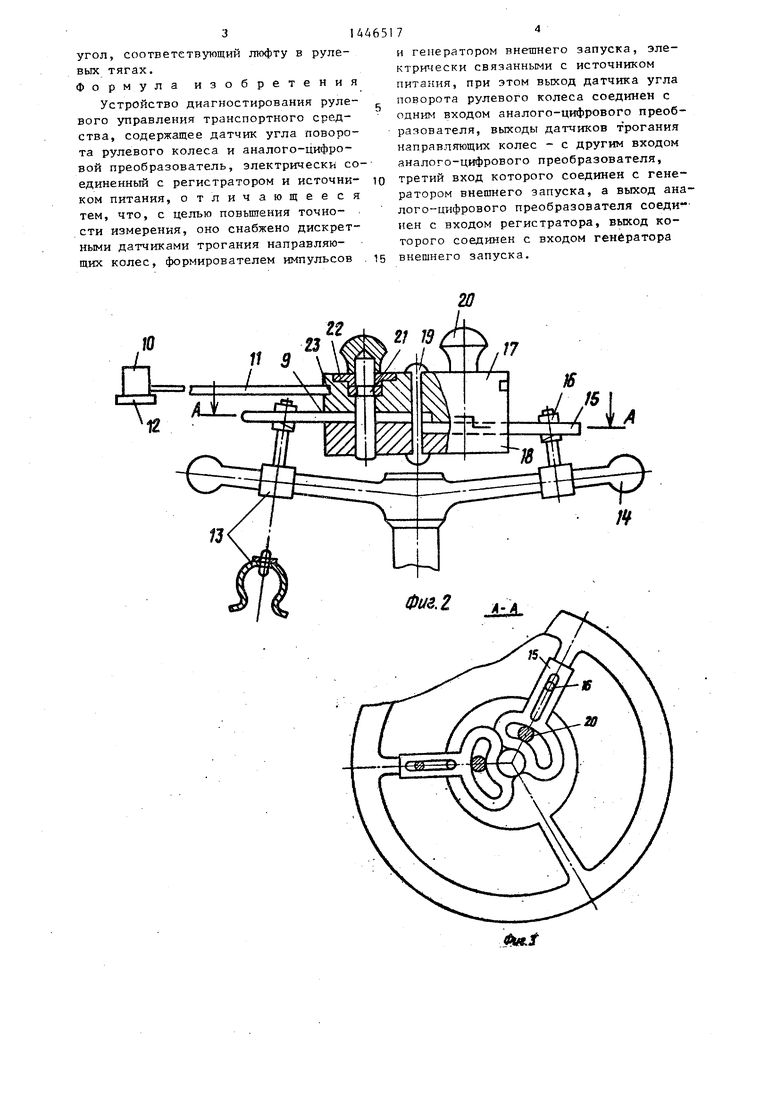
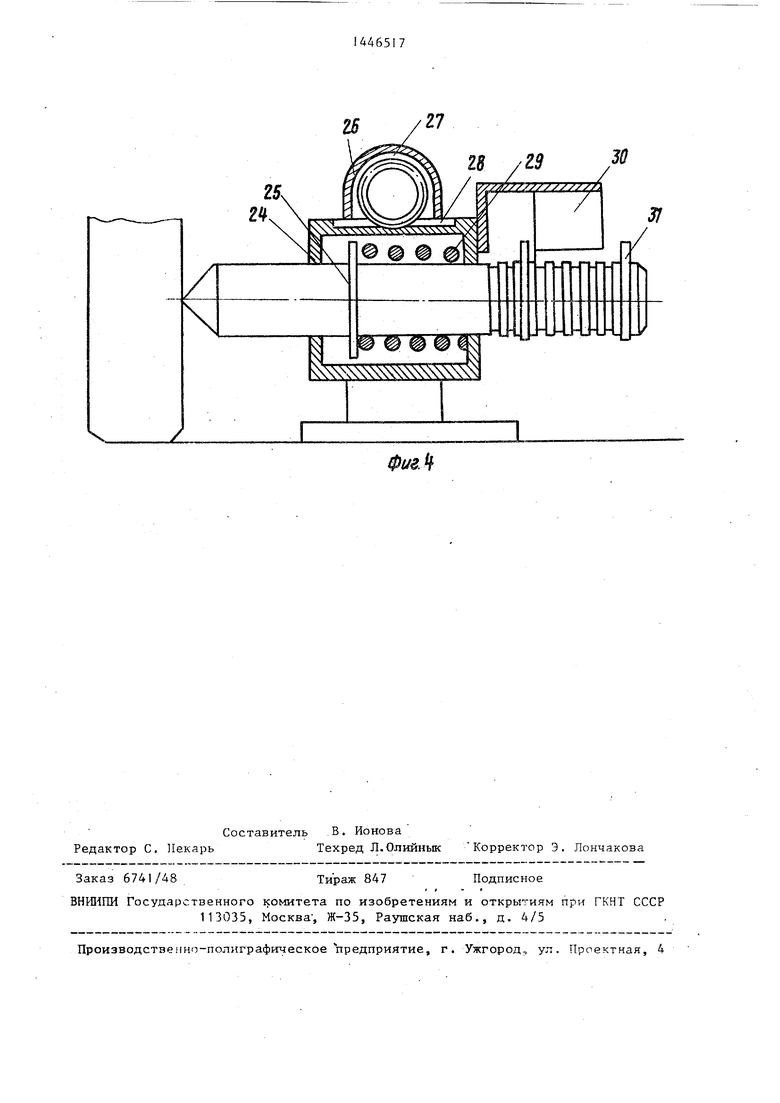
На фиг. 1 изображена блок-схема устройства; на фиг. 2 - схема датчика угла поворота рулевого колеса и его крепление-, на фиг. 3 - разрез А-А на фиг. 2; на фиг . 4 - схема дат чйка трогания направляющего колеса.
Устройство (фиг. 1) включает в себя дискретные датчики I и 2 трогания направляющих колес, формирователь 3 импульсов, генератор 4 внеш- него запуска, аналого-цифровой преобразователь 5, датчик 6 угла поворота рулевого колеса, регистратор 7 и блок 8 питания.
Датчик угла поворота рулевого ко- леса (фиг.2 и 3) включает, подвижный 9 и неподвижный 10 элементы, соединенные гибкой связью 11. Неподвижньш элемент закрепляется посредством магнита 12 к кабине мащины, а под- вижный с помощью зажимов 13 - на рулевом колесе 14. В зависимости от конструкции рулевого колеса положение за;жимов 13 регулируется по радиусу и высоте, а также по перимет- ру окружности перемещения путем применения фигурных рычагов 15 (фиг. 3 имеющих соответствующие прорези. Фиксация зажимов 13 осуществляется сферческими гайками 16. Для фиксации фи- гурных рычагов корпус подвижного, элемента выполнен из верхней 17 и нижне 18 частей, соединенных осью 19 и винтами 20, обеспечивающими зажим рычагов между частями корпуса. Зинт за- крепляется в верхней части Koprtyca при помощи стопорного кольца 21 и втулки 22. В верхней части корпуса имеется канавка 23 для элемента гибкой связи.
Датчик трогания направляющего колеса (фиг. 4) включает подвижную 24 с упором 25 и неподвижную 26 части, червячное колесо 27 с рейкой 28, npyжину 29 и измерительный йреобр.азова- тель 30 с подвижным элементом 31.
Устройство работает следующим об- разом.
,
Ю
15
20
30 5 Ю5
0
Устанавливается рулевое колесо в положение, соответствующее нулевому значению датчика 6 угла поворота рулевого колеса, затем к обоим направляющим колесам устанавливаются дискретные датчики и 2 трогания колеса так, чтобы обеспечить их сраба- тьгеание. Для этого упор 25 устанавливается так, чтобы сжалась пружина 29. С помощью червячной передачи 27- 28 устанавливается положение измерительного преобразователя 30 и его подвижного элемента 31 в зоне дифференциального хода, когда перемещение направляющего колеса приводит к появлению сигнала на вьгх:оде дискретных датчиков или 2.
После настройки датчиков 1 и 2 нажимается кнопка Пуск генератора 4 внешнего запуска, в результате чего вьщается одиночны импульс, поступающий на вход Начало преобразования аналого-цифрового преобразователя 5, коюрый начинает преобразовывать сигнал, непрерьшно поступающий с датчика 6 угла поворота рулевого колеса на его вход. Преобразование сигнала прекращается после поступления сигнала с датчика 1 или 2 трогания направляющих колес, которьп4 появляется в момент трогания одного из колес. Сигнал одного дискретного датчика, например. 1, через формирователь 3 импульсов поступит на вход Конец преобразования аналого-цифрового преобразователя 5, а последний вьщаст результат измерения на регистратор 7 . Регистратор 7 фиксирует результат измерения угла поворота колеса и выдает команду на очередной пуск генератора 4 внешнего запуска, кЪторый снова вьщает одиночный импульс на вход Начало преобразования аналого- цифрового преобразователя 5, и измерение повторяется.
При наличии люфта в рулевых тягах второе управляемое колесо будет трогаться позднее первого и от датчика, например 2, поступит еще один сигнал через формирователь 3 импульсов на аналого-цифровой преобразователь 5, который вьщаст второй результат на регистратор 7. Если первым тронется колесо с датчиком 2, тогда второй сигнал поступит от датчика 1.
В результате будут измерены угол свободного хода рулевого колеса и
314
угол, соответствующий люфту в рулевых тягах. Формула изобретения
Устройство диагностирования руле- вого управления транспортного средства, содержащее датчик угла поворота рулевого колеса и аналого-цифровой преобразователь, электрически соединенный с регистратором и источником питания, отличающееся тем, что, с целью повьшения точности измерения, оно снабжено дискретными датчиками трогания направляющих колес, формирователем импульсов
и генератором внетпнего запуска, электрически связанными с источником питания, при этом выход датчика угла поворота рулевого колеса соединен с одним входом аналого-цифрового преобразователя, выходы датчиков т рогания направляющих колес - с другим входом аналого-цифрового преобразователя, третий вход которого соединен с генератором внещнего запуска, а выход аналого-цифрового преобразователя соеди-- иен с входом регистратора, выход которого соединен с входом генератора внешнего запуска.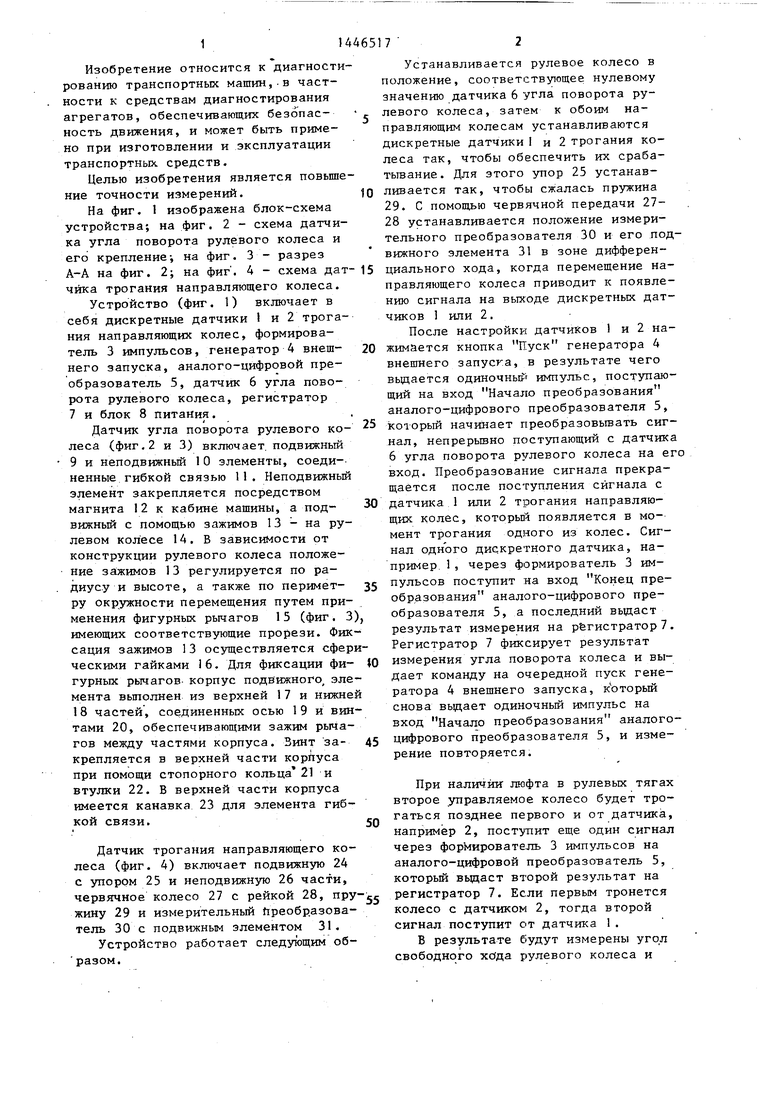
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ И КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕХАНИЗМОВ ТРАНСПОРТНЫХ И СТАЦИОНАРНЫХ СИСТЕМ | 2013 |
|
RU2545250C2 |
| АКУСТИКО-ЭМИССИОННЫЙ СПОСОБ ДИАГНОСТИРОВАНИЯ КОЛЕЦ ПОДШИПНИКОВ БУКСОВОГО УЗЛА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2391656C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ КУРСА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2060532C1 |
| Устройство для диагностической проверки системы рулевого управления автомобилей | 1981 |
|
SU1537147A3 |
| АКУСТИКО-ЭМИССИОННЫЙ СПОСОБ ДИАГНОСТИРОВАНИЯ КОЛЕСНЫХ ПАР ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2296320C1 |
| Система управления стендом для диагностирования технического состояния транспортных средств | 1988 |
|
SU1553875A1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ И КОНТРОЛЯ СОСТОЯНИЯ МЕХАНИЗМОВ И СИСТЕМ | 2015 |
|
RU2608202C2 |
| АВТОМАТИЗИРОВАННЫЙ СТЕНД КОНТРОЛЯ ВЫХОДНЫХ ХАРАКТЕРИСТИК СПИРАЛЬНЫХ ПРУЖИН | 2012 |
|
RU2526553C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 1993 |
|
RU2042932C1 |
| Система управления активными подвесками транспортного средства | 1988 |
|
SU1572838A1 |
Изобретение относится к диагностированию транспортных машин, в частности к средствам диагностирования агрегатов, обеспечивающих безопасность движения, и может быть применено при изготовлении и эксплуатации транспортных средств. Цель изобретения - повышение точности измерений. Устройство содержит датчики 1 и 2 трогания направляющих колес, формирователь импульсов 3, генератор 4 внешнего запуска, аналого-цифровой преобразователь 5, датчик угла поворота 6 рулевого колеса, регистратор 7 и блок питания 8. После установки датчиков 1, 2 и 6 включается генератор 4 внешнего запуска, подающий сигнал на аналого-цифровой преобразователь 5, начинающий преобразовывать сигнал от датчика 6 и прекращающий преобразование сигнала после- поступления сигнала от дачиков I или 2. 4 ил. ш (Л
f
Фи$,1
J:
Составитель В. Ионова Редактор С. ПекарьТехред Л.Олийнык Корректор Э. Лончакова
Заказ 6741/48
Тираж 847
ВНИППИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва , Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород., ул. Проектная, 4
3Q
31
фигЛ
Подписное
| Фрумкин Л.А | |||
| и др | |||
| Автоматизация стендовых испытаний рулевых приводов с помощью ЭВМ.- Труды НАТИ, 1975, вып | |||
| Металлические подъемные леса | 1921 |
|
SU242A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
