I
(21)4476751/40-11
(22)23.08.88
(46) 23.06.90. Бнш. № 23
(72) Д.В.Шарапов
(53) 627.113 (088.8)
(56) Авторское свидетельство СССР
1150103, кл. В 60 G 25/00, 1983.
(54) СИСТЕМА УПРАВЛЕНИЯ АКТИВНЫМИ ПОДВЕСКАМИ ТРАНСПОРТНОГО СРЕДСТВА (57) Избретение относится к активным подвескам транспортных средств, в частности к их системам управления. Цепью изобретения является расширение функциональных возможностей пу
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления активными подвесками многоосного транспортного средства | 1983 |
|
SU1150103A1 |
| СИСТЕМА УПРАВЛЕНИЯ АКТИВНОЙ ПОДВЕСКОЙ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2019438C1 |
| Система управления активной подвеской транспортного средства | 1990 |
|
SU1789358A1 |
| Система управления активными подвесками многоопорного транспортного средства | 1988 |
|
SU1527022A1 |
| Способ и система управления демпфирующими свойствами системы подрессоривания танка | 2024 |
|
RU2826323C1 |
| СПОСОБ И СИСТЕМА ПОДРЕССОРИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2548823C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568163C1 |
| ПНЕВМАТИЧЕСКАЯ ПОДВЕСКА | 2010 |
|
RU2441771C1 |
| Активная подвеска корпуса транспортного средства | 1973 |
|
SU568561A1 |
| УНИВЕРСАЛЬНЫЙ МОДУЛЬ ОСИ ТРАНСПОРТНОГО СРЕДСТВА | 2023 |
|
RU2819091C1 |
Изобретение относится к активным подвескам транспортных средств, в частности, к их системам управления. Целью изобретения является расширение функциональных возможностей путем упрощения выполнения логических и арифметических операций управления. Блоки 10, 11 определения продольной и поперечной устойчивости, инверторы, усилители и устройства сравнения сил, действующих на подрессоренный корпус, в совокупности представляет собой специализированную цифровую электронную выччслительную машину (СЦЭВМ), построенную на базе микропроцессорных устройств. Все измеряемые непрерывные входные величины связаны с СЦЭВМ через аналого-цифровые преобразователи. Вычисленные значения управляющих сигналов рассогласования через цифроаналоговые преобразователи 29 подводятся к исполнительным устройствам активных подвесок. 2 ил.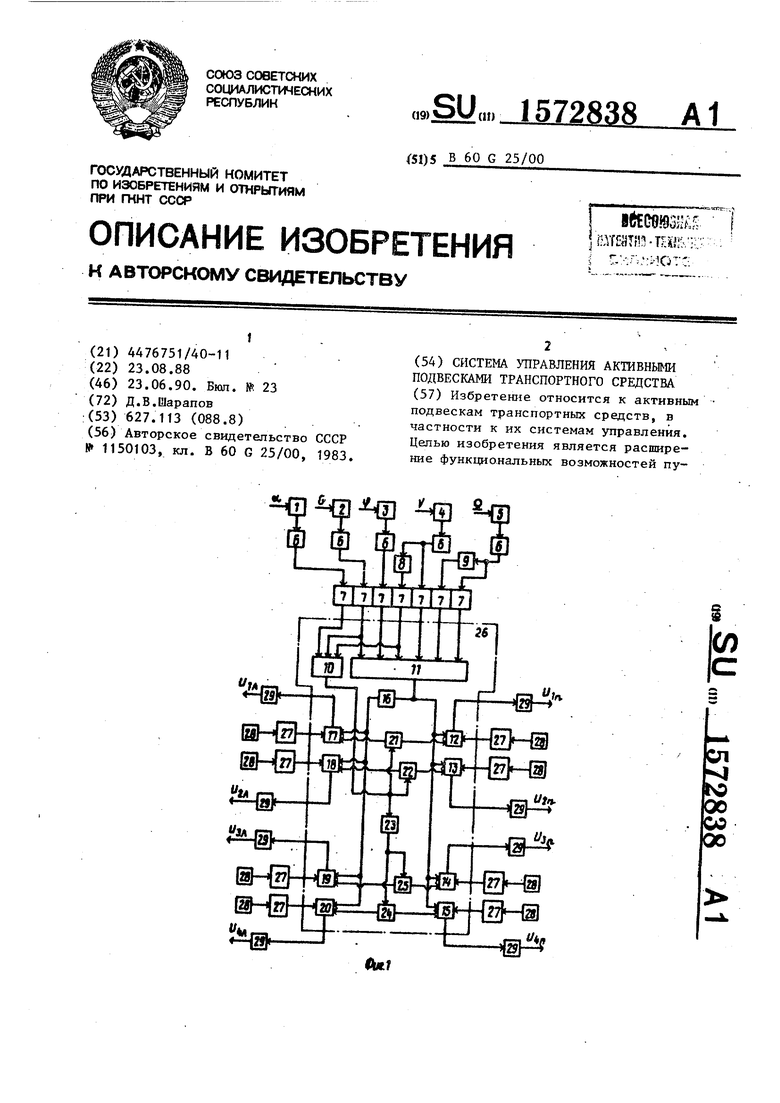
26
(Л
ел 1
ю
00 СО 00
тем упрощения выполнения логических и арифметических операций управления. ВЬоки 10, 11 определения продольной и поперечной устойчивости, инверторы, усилители и устройства сравнения сил, действующих на подрессоренный корпус, в совокупности представляют собой специализированную цифровую электронную вычислительную машину (СЦЭВМ),
Изобретение относится к активным 15 подвескам транспортных средств (ТС), частности к устройствам управления активными подвесками.
I Цель изобретения - расширение функциональных возможностей путем20
упрощения выполнения логических и арифметических операций управления.
На фиг.1 изображена блок-схема с|истемы управления активными подвес- транспортного средства; на25
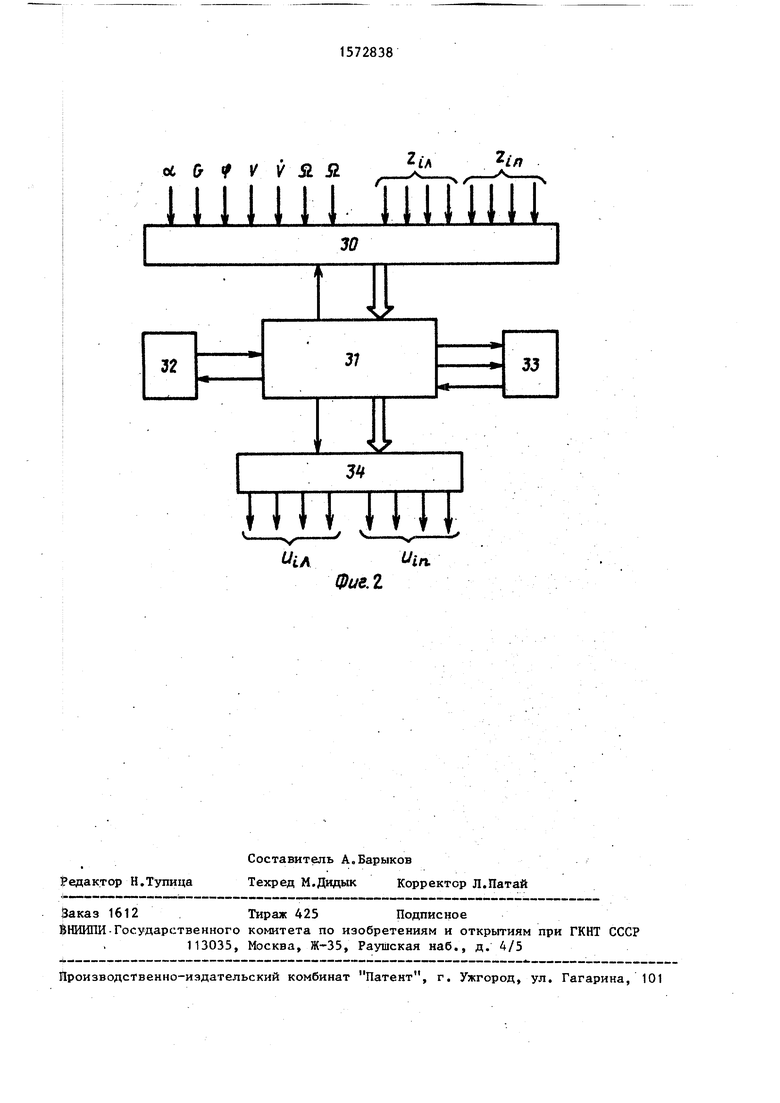
фиг.2 структурная схема специализированной цифровой ЭВМ системы управления активными подвесками.
Система управления активными подвесками транспортного средства 0 (фиг, 1) содержит датчик 1 угла oL продольного крена маятникового типа, датчик 2 измерения статического веса 5 подрессоренного корпуса транспортного средства тензометрического ти- „ па, датчик 3 угла о поперечного кре- ла транспортного средства маятникового типа, датчик 4 скорости V движения транспортного средства тахометричес- кого типа, датчик 5 угла Q поворота 0 рулевого колеса потенциометрического типа.
Выходы датчиков 1-5 через низкочастотные фильтры 6 соединены с входами блока аналого-цифровых преоб- 45 разователей (АЦП) 7 Для получения сигналов, пропорциональных продольным ускорениям V транспортного средства и .угловой скорости вращения рулевого колеса Q , система снабжена Q дифференцирующими звеньями (дифференциаторами) 8 и 9, входы которых через низкочастотные фильтры соединены с выходами датчиков скорости V транспортного средства и угла TZ поворота ., рулевого колеса, а выходы - с блоками АЦП 7. Фактически дифференциаторы 8 и 9 могут рассматриваться как датчики для измерения величин V, Г2 . При
построенную на базе микропроцессорных устройств. Все-измеряемые непрерывные входные величины связаны с СЦЭВМ через аналого-цифровые преобразователи. Вычисленные значения управляющих сигналов рассогласования через цифроаналоговые преобразователи 29 подводятся к исполнительным устройствам активных подвесок. 2 ил.
этом вместо дифференциатора 8 может быть использован акселерометр, ось чувствительности которого совпадает с продольной осью ТС.
Каждый из перечисленных АЦП 7 совместно с низкочастотными фильтрами 6 и датчиками 1-5, а также дифференциаторами 8 и 9 образуют каналы измерения перечисленных величин. В АЦП 7 непрерывные сигналы с датчиков 1-5, а также сигналы, поступающие с дифференцирующих звеньев 8 и 9, преобразуются в дискретный цифровой код. При этом выходы АЦП соединены с блоками 10 и 11 определения продольной и поперечной устойчивости соотве ст- венно.
С блоком 10 определения продольной устойчивости соединены выходы АЦП по каналам измерения угла об продольного крена, измерения статического веса G подрессоренного корпуса и продольного ускорения V транспортного средства. На вход блока 11 поперечной устойчивости подведены выходы АЦП по каналам измерения статического веса G подрессоренного корпуса ТС, угла ц поперечного крена , продольных скорости и ускорения (V и V транспортного средства, угла Т2 поворот и угловой скорости поворота Qрулевого колеса.
Выход блока 11 определения поперечной устойчивости напрямую соединен с блоками 12-15 сравнения сил, действующих от подвесок колес одного (правого) борта, на подрессоренный корпус с их заданными значениями, а через инвертор 16 с аналогичными блоками 17-20 сравнения тех же сил, действующих на подрессоренный корпус от подвесок колес другого (левого) борта (рассматривается система управления активными.подвесками для четырехосного шасси).
Выход блока 10 определения продольной устойчивости через промежуточные усилители 21 и 22 попарно соединены с блоками 12, 17 и 13,. сравнения сил в подвесках колес, размешенных впереди центра подрессоренных масс, соответственно. Одновременно блок 10 через инвертор 23 и промежуточные усилители 24 и 25 попарно соединены с блоками 15, 20 и 14, 19 сравнения сил в подвесках колес, размещенных сзади центра масс подрессоренного корпуса, соответственно.
Блоки 10 и 11 определения продольной и поперечной устойчивости, усилители 21-25 и инверторы 16 и 23, как цифровые умножители, совместно с блоками 12-15 и 17-20 сравнения, как цифровые арифметические сумматоры, образуют (фиг.1) специализированную цифровую электронную вычислительную машину 26 (СЦЭВМ), построенную на базе микропроцессорных устройств (элементы СЦЭВМ очерчены штриховой линией).
АЦП 27 предназначены для преобразования в дискретный цифровой код непрерывных сигналов, поступающих с выходов датчиков 28 силы, которые предназначены для измерения суммарной силы, действующей от подвесок колес на подрессоренный корпус. Измеренные датчиками 28 значения сил через АЦП 27 поступают в блоки 12-15 и 17-20 сравнения СЦЭВМ 26.
В перечисленных блоках сравнения СЦЭВМ 26 определяется в виде дискретного -цифрового кода рассогласование между заданным значением силы и реально действующим на подрессоренный корпус. Выходы указанных блоков сравнения соединены с входами цифроана- логовых преобразователей 29 (ЦАП). В последних дискретный цифровой код преобразуется в непрерывный сигнал управления U;n для 1-го колеса левого борта и U ;п для 1-го колеса правого борта. Эти непрерывные сигналы управления пропорциональны величине отклонения сил, действующих от подвесок колес от их заданных значений. Для сведения к минимуму названных отклонений сил сигналы U и U,-n подаются на входы исполнительных уст- ройств активных подвесок, однако исполнительные устройства не входят
0
5
0
в систему управления активными подвесками и поэтому не показаны.
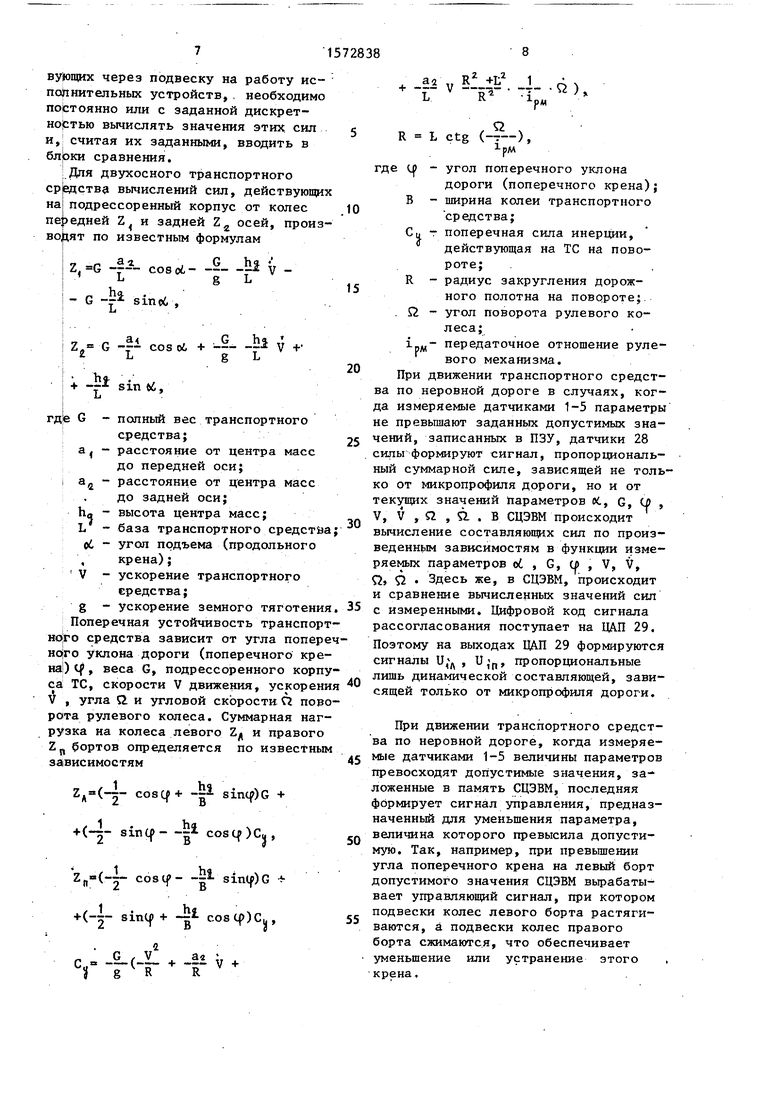
Таким образом, основу системы управления активными подвесками составляет СЦЭВМ, структурная схема которой представлена на фиг.2. Она включает в себя устройство 30 ввода (буферная схема ввода), на которое поступают в виде дискретного цифрового кода сигналы, соответствующие углу продольного крена oi , весу подрессоренного корпуса G, углу поперечного крена ср , скорости V и ускорению V движения транспортного средства, углу Q и угловой скорости С2 поворота рулевого колеса, а также сигналы Z и Z;n, пропорциональные силам, действующим от подвесок колес соответственно левого и правого бортов. Устройство 30 ввода сведения об измеренных перечисленных выше величинах передает в микропроцессор 31, который связан с постоянным запоминающим устройст- 5 вом 32 (ПЗУ) и оперативным запоминающим устройством 33 (ОЗУ). В запоминающих устройствах содержится программа, по которой вычисляются заданные значения составляющих сил, действующих на подрессоренный корпус со стороны деталей подвесок в зависимости от измеряемых величин, а также все необходимые константы, характеризующие конструктивные особенности ТС. Микропроцессор содержит арифметическо- логическое устройство (АЛУ), которое выполняет все логические и арифметические операции над измеренными величинами по программам, хранящимся в запоминающемся устройстве. Сигналы
0
5
0
управления
U,-q через устройство
34 вывода подводятся к цифроаналого- вым преобразователям, при этом число выходов должно быть равно числу ис- полнительных устройств активных подвесок.
Продольная устойчивость транспортного средства зависит от измеряемых
величин oi , G, V. Очевидно, что,при
ускоренном движении транспортного средства на подъем оси колес, размещенных сзади центра подрессоренных масс, будут перегружаться по сравнению со случаем равномерного движения по горизонтальной дороге, а оси колес, размещенных впереди центра подрессоренных масс, будут разгружаться. Чтобы исключить влияние названных изменений сил, деиствующих через подвеску на работу исполнительных устройств, необходимо постоянно или с заданной дискретностью вычислять значения этих сил и, считая их заданными, вводить в блоки сравнения.
Для двухосного транспортного средства вычислений сил, действующих на подрессоренный корпус от колес передней Z и задней Z2 осей, производят по известным формулам
SL 4 v
К L
15
- cos ot +
-Ь у +Li
20
sin 66,
где G
a, а„ ha
полный вес транспортного средства;
расстояние от центра масс до передней оси; расстояние от центра масс до задней оси; высота центра масс; L - база транспортного средства; об - угол подъема (продольного
крена); V - ускорение транспортного
средства;
g - ускорение земного тяготения. Поперечная устойчивость транспортного средства зависит от угла поперечного уклона дороги (поперечного крена) If, веса G, подрессоренного корпуса ТС, скорости V движения, ускорения V , угла О. и угловой скорости CZ поворота рулевого колеса. Суммарная нагрузка на колеса левого Z и правого
Zn бортов определяется по известным зависимостям
ZA( sinqOG + +(--- -|i coscf )Cj,
Z „«(-- cos ifg1 sinlf)G A
+(--- sinCj) + cosq)C,,
V f т -r
-
R2 +E2
Rт- -а
Р«
0
5
0
5
0
Q
R L ctg (-т-),
грм
где U) - угол поперечного уклона
дороги (поперечного крена); В - ширина колеи транспортного
средства; С поперечная сила инерции,
действующая на ТС на повороте;
R - радиус закругления дорожного полотна на повороте; Ј - угол поворота рулевого колеса;
i M- передаточное отношение рулевого механизма.
При движении транспортного средства по неровной дороге в случаях, когда измеряемые датчиками 1-5 параметры не превышают заданных допустимых значений, записанных в ПЗУ, датчики 28 силы формируют сигнал, пропорциональный суммарной силе, зависящей не только от микропрофиля дороги, но и от текущих значений Параметров et, G, U , V, V , О. , П. . В СЦЭВМ происходит вычисление составляющих сил по произведенным зависимостям в функции измеряемых параметров cd , G, Cf , V, V, Q, Q . Здесь же, в СЦЭВМ, происходит и сравнение вычисленных значений сил с измеренными. Цифровой код сигнала рассогласования поступает на ЦАП 29.
Поэтому на выходах ЦАП 29 формируются сигналы и, Л , U n, пропорциональные лишь динамической составляющей, зависящей только от микропрофиля дороги.
При движении транспортного средства по неровной дороге, когда измеряемые датчиками 1-5 величины параметров превосходят допустимые значения, заложенные в память СЦЭВМ, последняя формирует сигнал управления, предназначенный для уменьшения параметра, величина которого превысила допустимую. Так, например, при превышении угла поперечного крена на левый борт допустимого значения СЦЭВМ вырабатывает управляющий сигнал, при котором подвески колес левого борта растягиваются, а подвески колес правого борта сжимаются, что обеспечивает уменьшение или устранение этого крена.
ормула
и
9 з о б р
157
е т е н и я
Система управления активными подвесками транспортного средства, .содержащая датчик угла продольного крена, датчик угла поперечного крена, датчик измерения статического веса подрессоренного корпуса транспортного средства, датчики для измерения скорости и ускорения движения транспортного средства, датчики угла и угловой скорости поворота рулевого колеса, а также блоки сравнения сил, действующих на подрессоренный корпус от подвесок с их заданными значениями, причем все указанные датчики через низкочастотные фильтры соединены с входами блока аналого-цифровых преобразователей, который совместно с указанными фильтрами и датчиками образуют каналы измерения перечисленных величин, при этом выходы блока аналого-цифровых преобразователей по каналам измере- ния угла продольного крена, статического веса подрессоренного корпуса и ускорения движения транспортного средства соединены с блоком определения продольной устойчивости транспортного средства, выходы бло- ка аналого-цифровых преобразователей по каналам измерения статического веса подрессоренного корпуса, угла поперечного крена, скорости и ускорения движения транспортного средства, угла и угловой скорости поворота рулевого колеса соединены с блоком определения поперечной устойчивости транспортного средства, цифроаналоговые
1572838
10
0
5
0
5
0
5
0
преобразователи, инверторы, усилители, промежуточные усилители, отличающаяся тем, что, с целью расширения функциональных возможностей путем упрощения выполнения логических и арифметических операций управления, она снабжена дополнительными аналого- цифровыми преобразователями, при этом выход блока определения поперечной устойчивости соединен непосредственно с упомянутыми блоками сравнения сил в активных- подвесках одного борта, а через инвертор - с блоками сравнения тех же сил в подвесках колес другого борта, а выход блока определения продольной устойчивости через промежуточные усилители соединен попарно с упомянутыми блоками сравнения указанных сил в подвесках колес, расположенных по ходу с одной стороны центра подрессоренных масс, через инвертор и промежуточные усилители соединен попарно с блоками сравнения тех же сил в подвесках колес, расположенных с другой стороны центра подрессоренных масс, при этом каждый датчик измерения сил, действующих на подрессоренный корпус от подвесок колес через соответствующий дополнительный аналого-цифровой преобразователь, соединен с упомянутыми блоками сравнения сил, действующих на подрессоренный корпус от подвесок с их заданными значениями, выходы каждого из упомянутых блоков сравнения соединены с цифроаналоговыми преобразователями, являющимися выходными звеньями системы управления активными подвесками.
об 0 f V V Si Я
111 ill 111П111
32
37
Щ Ш1
.
Фиг. г
I
33
I