Известные устройства для автоматической синхронизации скоростей рабочих органов посевного агрегата со скоростью движения трактора не позволяет устранить погрешности в гнездообразовании, возникающие при проскальзывании ведущих колес трактора.
В отличие от известного, с целью устранения погрешностей в гнездообразовании, возникающих от проскальзывания ведущих колес трактора, путем сопоставления угловых ускорений ведущих колес трактора и линейных ускорений посевного агрегата, в предложенном устройстве применены датчики угловых и линейных ускорений, сигналы рассогласования между которыми поступают через исполнительный двигатель и дифференциальный механизм на индукционный датчик, посылающий импульсы гнездообразующим механизмам высевающих аппаратов.
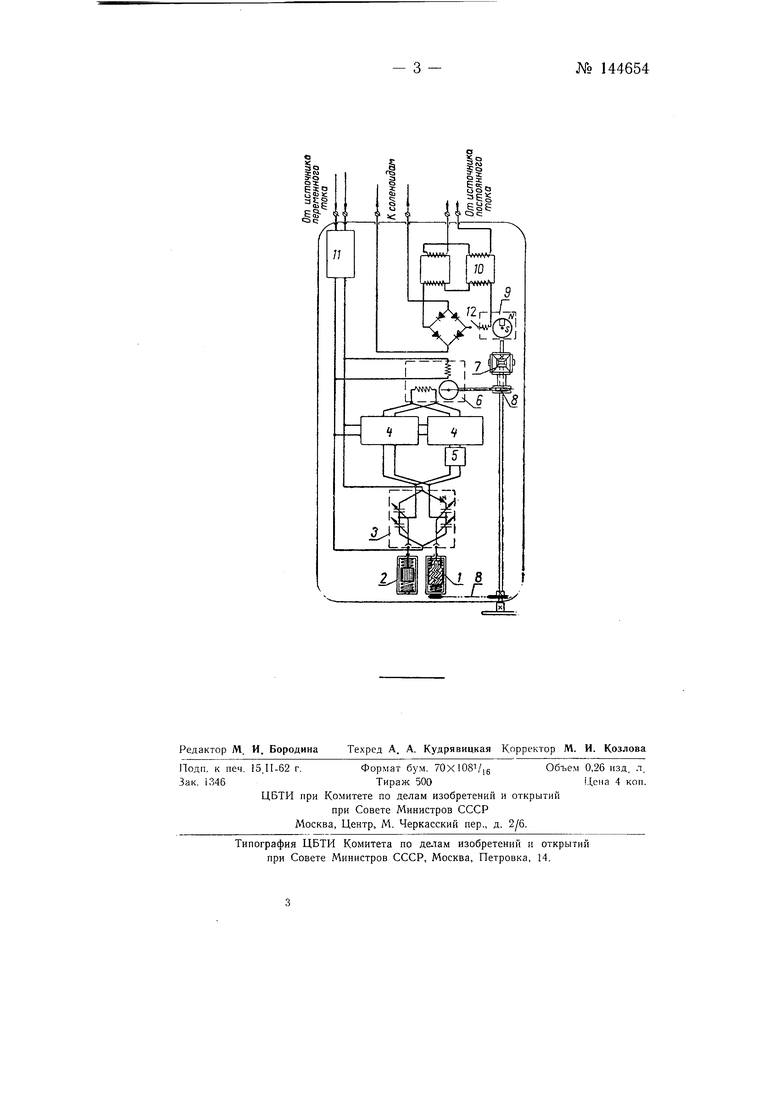
На чертеже изображена схема предложенного устройства.
Устройство для автоматической синхронизации скоростей рабочих органов посевного агрегата со скоростью движения трактора состоит из датчика угловых ускорений 1, датчика линейных ускорений 2, блока сравнения 3, усилителя 4, блока интегрирования 5, исполнительного двигателя 6, дифференциала 7, червячной передачи 8, индукционного датчика 9 команд, бесконтактного реле 10, мультивибратора 11 и выключателя 12.
Устройство работает следующим образом.
При движении агрегата без скольжения, вращение от одного из ходовых колес трактора передается индукционному, датчику .9 команд.
Вырабатываемое датчиком напряжение передается в обмотку бесконтактного реле, а от него к соленоидам, открывающим клапаны высевающих аппаратов сеялки через строго определенные отрезки проходимого агрегатом пути.
№ 144654-- 2 В случае проскальзывания колес посевного агрегата пропорциональность между условиями и линейными ускорениями нарушается, что приводит в свою очередь к нарушению равновесия моста блока сравнения и сдвигу фазы команды датчика 9. Величина рассогласования моста, пропорциональная разности углового и линейного ускорений в данны момент, то есть пропорциональная второй производной пути проскальзывания по времени, используется для коррекции, осуществляемой по следуюш,ей цепи: сигнал рассогласования (преобразованный и усиленный)- исполнительный двигатель (5 - дифференциал 7- ротор датчика 9.
Ввод корректирующих команд в обмотку управления исполнительного двигателя осуществляется двояко:
а)- по отклоне 1ию, возникающему во время проскальзывания колес сеялки, которое получается в результате двукратного интегрирования сигнала рассогласования, снимаемого с диагонали моста.
Причем первичное интегрирование осуществляется в блоке интегрирования 5, представляющем собой ячейку RC, а вторичное - в самом исполнительном двигателе. Угол поворота якоря двигателя пропорционален интегралу от подводимого напряжения;
б) по производной от отклонения, .получаемой в результате интегрирования предварительно усиленного сигнала в самом исполнительном двигателе.
Включение и выключение устройства производится трактористом в моменты прохождения установленного на тракторе указателя над заранее проложенными маркерными бороздами, расположенными по краям обрабатываемого поля на расстоянии кратном величине междугнездья.
Питание устройства осуществляется от аккумулятора, установленного на тракторе.
Устройство представляет интерес для создания квадратно-гнездовой сеялки с автономным управлением.
Предлол енное устройство одобрено Всесоюзным научно-исследовательским институтом сельско.козяйственного машиностроения ВИСХОЛ.
Предмет изобретения
Устройство для автоматической синхронизации скоростей рабочих органов посевного агрегата со скоростью движения трактора, отличающееся тем, что, с целью устранения погрешностей в гнездообразовании, возникающих от проскальзывания ведущих колес трактора, путем сопоставления угловых ускорений ведущих колес трактора и линейных ускорений посевного агрегата, в нем применены датчики угловых и линейных ускорений, сигналы рассогласования между которыми поступают через исполнительный двигатель и дифференциальный механизм на индукционный датчик, посылающий импульсы гнездообразующим механизмам высевающих аппаратов.
I ..
8
iSJl
-ft