Изобретение относится к области сельскохозяйственного машиностроения и приборостроения и может быть использовано как для экспресс-анализа, так и для постоянного контроля за величиной буксования трактора при движении по опорной поверхности с различными физико-механическими свойствами.
Известно устройство для измерения буксования, содержащее датчик оборотов двигателя, датчик импульсов путеизмерительного колеса, связанный с регистратором и схемой управления через преобразователь сигналов, введена схема умножения частоты. (Патент на полезную модель № SU 1158935, опубликовано 30.05.1985).
Недостатком этого устройства является то, что измерение производится на фиксированном участке и в двух режимах под нагрузкой и на холостом ходу с последующим сравнением. Малая точность измерения. Невозможность определения мгновенного значения буксования.
Известно устройство мониторинга буксования ведущих колес мобильных машин, содержащее колесные датчики и прибор для вычисления КПД дифференциала и КПД движителя, учитывающий потери скорости движения от раздельного и совместного буксования колес, при этом прибор для вычисления КПД дифференциала и КПД движителя выполнен в виде электронного блока управления, состоящего из входных формирователей, процессора на основе однокристальной микроЭВМ, устройства управления, снабженного пользовательским интерфейсом древовидной структуры с модульной управляющей программой, и дисплея, выполненного в виде графического жидкокристаллического индикатора с системой команд (Патент на полезную модель № 37856, опубликовано 10.05.2004, бюл. № 13).
К недостаткам данного устройства можно отнести низкую точность измерения.
Известно устройство для определения буксования колесных тракторов с одной ведущей осью в реальном времени включает формирователи импульсов, импульсные датчики и элементы сравнения, при этом в качестве элементов сравнения использованы электронный блок, учитывающий разность геометрических размеров ведущих и ведомых колес и количество получаемых сигналов, электронный блок сравнения величины буксования с максимально допустимым значением и электронный блок сравнения сигнала по его длительности, а также устройство имеет электронный блок, рассчитывающий величину буксования от получаемых сигналов, долгое запоминающее устройство, таймер, реле, при этом выход первого датчика соединен со входом электронного блока, учитывающего разность геометрических размеров ведущих и ведомых колес и количества получаемых сигналов, выход которого соединен с первым входом электронного блока, рассчитывающего величину буксования, а выход второго датчика соединен со вторым входом электронного блока, рассчитывающего величину буксования, выход которого соединен с первым входом электронного блока сравнения сигнала по величине, а выход долгого запоминающего устройства соединен со вторым входом электронного блока сравнения сигнала по величине, первый выход которого соединен с первым входом электронного блока сравнения сигнала по длительности, выход таймера, соединенный со вторым входом электронного блока сравнения сигнала по длительности, выход которого с первым входом реле, второй выход электронного блока сравнения сигнала по величине соединен со вторым входом реле, а выход реле соединен с входом исполнительного элемента (Патент на полезную модель № 177523, опубликовано 28.02.2018, бюл. № 7).
К недостаткам устройства можно отнести привязку к ведомым колесам, которые, в свою очередь, также имеют погрешность полученных данных в измерении буксования.
Известно устройство для измерения буксования сельскохозяйственных тракторов, содержащее индуктивный датчик и измерительный диск, при этом дополнительно введены датчик фактической скорости в виде GPS-навигатора, поддерживающего стандарт передачи данных NMEA0183 и подключенного ко второму входу ПЭВМ, используемого в качестве элемента сравнения и сохранения данных для их дальнейшего анализа и обработки, а также счетчик импульсов, соединенный с индуктивным датчиком и первым входом ПЭВМ (Патент на полезную модель № 118587, опубликовано 27.07.2012, бюл. № 21).
К недостаткам можно отнести нестабильные качество и точность GPS-навигатора, что повлияет на точность измерений.
Наиболее близким техническим решением, выбранным в качестве прототипа известно инерциальное устройство для измерения буксования сельскохозяйственных тракторов, включающее датчик положения колеса, модуль беспроводной связи, литий-ионный аккумулятор, при этом в датчике положения колеса установлено 9-осевое микроэлектромеханическое устройство инерциальной навигации с контроллером, Wi-Fi-модулем, светодиодами индикации состояния устройства и заряда аккумулятора, при этом Wi-Fi-модуль выполнен с возможностью передачи информации на устройство обработки, где в последующем происходит вычисление коэффициента буксования на основе информации, поступившей с инерциального датчика и ГЛОНАСС-навигатора (Патент на полезную модель № RU 184333, опубликовано 22.10.2018, бюл. № 30).
К недостаткам отнести нестабильные качество и точность ГЛОНАСС-навигатора, что повлияет на точность измерений.
Задачей изобретения является измерение мгновенных значений буксования колесного трактора.
Техническим результатом изобретения является измерение, обработка, сбор данных мгновенных значений буксования сельскохозяйственной техники, передача данных через спутниковый и ретрансляционный сигнал с целью его технологической адаптации к производственному процессу.
Технический результат достигается устройством для определения буксования колесного трактора, включающим модуль беспроводной связи, аккумулятор, регистрирующее устройство, при этом устройство состоит из корпуса, в котором расположен аккумулятор, в качестве аккумулятора используют литий-полимерный аккумулятор, в качестве регистрирующего устройства используют акселерометр, установленный в центре массы трактора, посредством которого регистрируют ускорение центра масс трактора в виде осциллограммы, акселерометр выполнен отдельным блоком с обеспечением возможности приема, регистрации, преобразования зарегистрированных сигналов посредством сигнальных проводов на плату устройства, расположенной в корпусе устройства, в качестве модуля беспроводной связи используют жестко закрепленные в корпусе GPRS-модуль и ГЛОНАСС+GPS-модуль, с помощью которых выполнена связь с удаленным персональным компьютером посредством ретрансляционного и спутникового сигнала соответственно через закрепленные на корпусе устройства передающие антенны, при этом на удаленном персональном компьютере для интегрирования полученной от акселерометра осциллограммы и определения значения буксования установлены приемные антенны ретрансляционного и спутникового сигналов.
Изобретение поясняется чертежами.
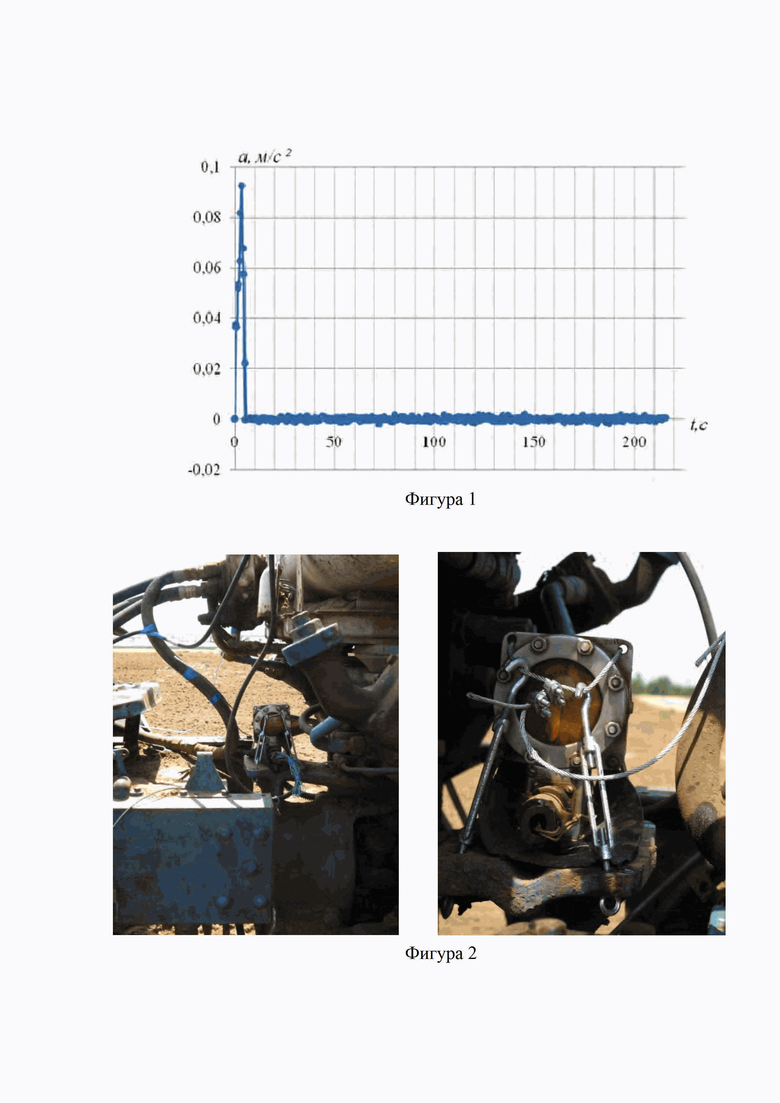
На фиг. 1 показана осциллограмма ускорения центра масс трактора ХТЗ-150К.
На фиг. 2 - Размещение акселерометра на тракторе ХТЗ-150К.
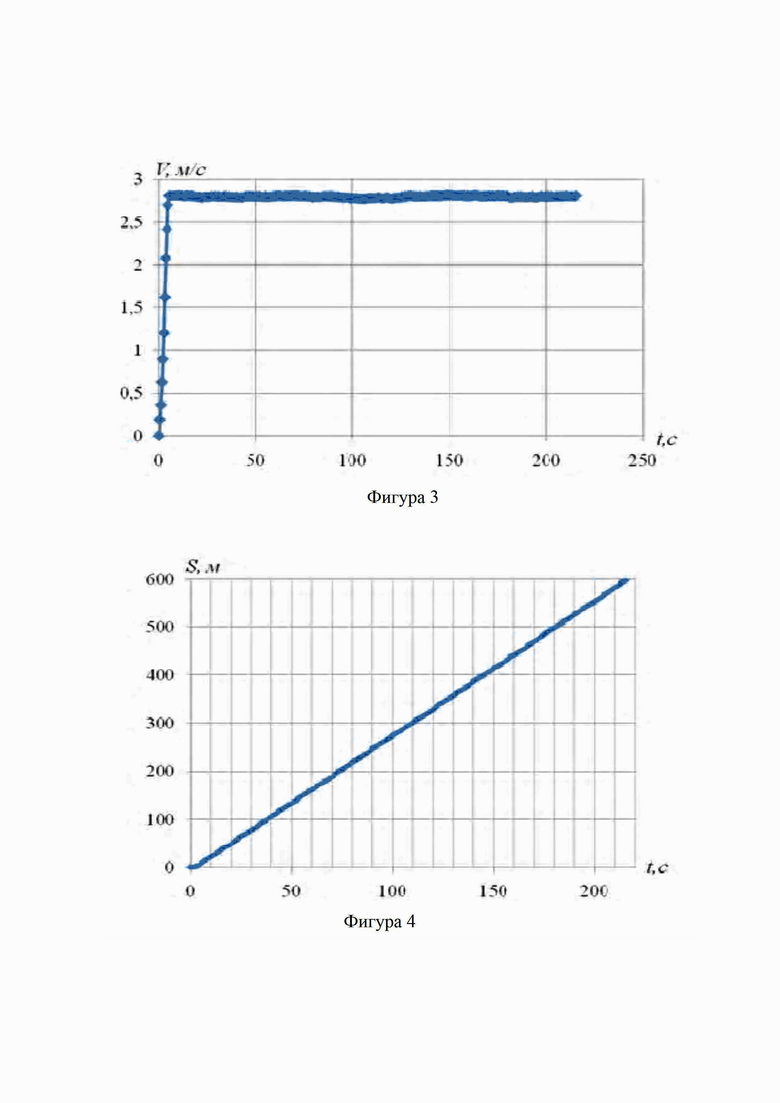
На фиг. 3 - Расчетная осциллограмма действительной скорости движения трактора ХТЗ-150К.
На фиг. 4 - Расчетная осциллограмма пройденного пути за опыт трактора ХТЗ-150К.
Использование метода «пятого колеса» вносит существенные трудности в определение действительной скорости движения трактора. Связано это с необходимостью проведения дополнительных тарировочных экспериментов «пятого» колеса для каждого выбранного почвенного фона поля, профилограмма которого в общем случае носит случайный характер. А также отсутствие автоматизированного алгоритма счёта указанного кинематического параметра через набор дискретных отметок, получаемых на осциллограмме, количество которых за контрольный промежуток времени приходится определять вручную. Кроме того, во время проведения эксперимента конструктивно трудно обеспечивать постоянный контакт «пятого» колеса с опорной поверхностью, в некоторых условиях при работе на повышенных скоростях может наблюдаться отрыв его от поверхности поля. Все это может вносить существенные ошибки в измеряемую величину.
Поэтому на тракторе ХТЗ-150К был опробован новый способ определения действительной скорости движения трактора. В качестве регистрирующего устройства был использован акселерометр, который позволяет регистрировать в виде осциллограммы ускорения центра масс трактора (фиг. 1).
Общий вид акселерометра, расположенного в центре масс трактора, представлен на фигуре 2.
Интегрирование получаемой осциллограммы позволяет получить расчётную осциллограмму действительной скорости движения трактора (фигура 3), обработка которой позволяет определить среднее значение действительной скорости трактора за опыт на удаленном персональном компьютере с приемными антеннами ретрансляционного и спутникового сигналов, где производим интегрирование полученной от акселерометра осциллограммы и определение значения буксования.
Точность такого метода будет определяться только точностью акселерометра, современная конструкция которых позволяет регистрировать значения ускорений с погрешностью плюс-минус 0,01%.
Для проверки адекватности такого метода путем численного интегрирования (метод прямоугольников) расчетной осциллограммы действительной скорости движения трактора было получено значение пройденного пути за время опыта (рисунок 4), значение которого составило 597 м.
Длина зачетного участка поля при проведении эксперимента составила 600 м. Таким образом, относительная ошибка данного метода составила около 0,5%. Кроме того, следует отметить универсальность данного метода, простоту, а также быстроту получения указанных параметров.
В программе «Power Graph» есть встроенные функции математической обработки сигналов, позволяющие проводить графическое интегрирование сигнала в реальном времени.
Сбор данных мгновенных значений буксования сельскохозяйственной техники, передача данных возможно производить через спутниковый или ретрансляционный сигнал с целью корректировки режимов работы современных машинно-тракторных агрегатов с цифровым управлением.
Таким образом, заявленное устройство для определения буксования колесного трактора измеряет, обрабатывает, собирает данные мгновенных значений буксования сельскохозяйственной техники, передаёт данные через спутниковый и ретрансляционный сигнал с целью его технологической адаптации к производственному процессу.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2014 |
|
RU2591647C1 |
| ТРЕК ТАХОГРАФ | 2011 |
|
RU2475704C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |
| КОМПЛЕКС ДЛЯ ПЕРСОНАЛЬНОЙ НАВИГАЦИИ | 2014 |
|
RU2574309C2 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2013 |
|
RU2528090C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2019 |
|
RU2720224C1 |
| ТРАКТОРНЫЙ АГРЕГАТ С СИСТЕМОЙ ОГРАНИЧЕНИЯ ДОСТУПА К ЕГО УПРАВЛЕНИЮ | 2014 |
|
RU2557107C1 |
| ТРАКТОР С РЕГИСТРАТОРОМ ПАРАМЕТРОВ | 2014 |
|
RU2542571C1 |
| СПОСОБ ОБСЛУЖИВАНИЯ И ЭКСПЛУАТАЦИИ ОБУВИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2551756C1 |
Изобретение относится к области сельскохозяйственного машиностроения и приборостроения. Устройство для определения буксования колесного трактора состоит из корпуса, в котором расположен аккумулятор, акселерометра, установленного в центре масс трактора, посредством которого регистрируют ускорение центра масс трактора в виде осциллограммы, и модуля беспроводной связи. Акселерометр выполнен отдельным блоком с обеспечением возможности приема, регистрации, преобразования зарегистрированных сигналов посредством сигнальных проводов на плату устройства, расположенную в корпусе устройства. В качестве модуля беспроводной связи используют жестко закрепленные в корпусе GPRS-модуль и ГЛОНАСС+GPS-модуль, с помощью которых выполнена связь с удаленным персональным компьютером посредством ретрансляционного и спутникового сигнала соответственно через закрепленные на корпусе устройства передающие антенны. Достигается возможность измерения, обработки, сбора данных мгновенных значений буксования сельскохозяйственной техники, передачи данных через спутниковый и ретрансляционный сигнал с целью его технологической адаптации к производственному процессу. 4 ил.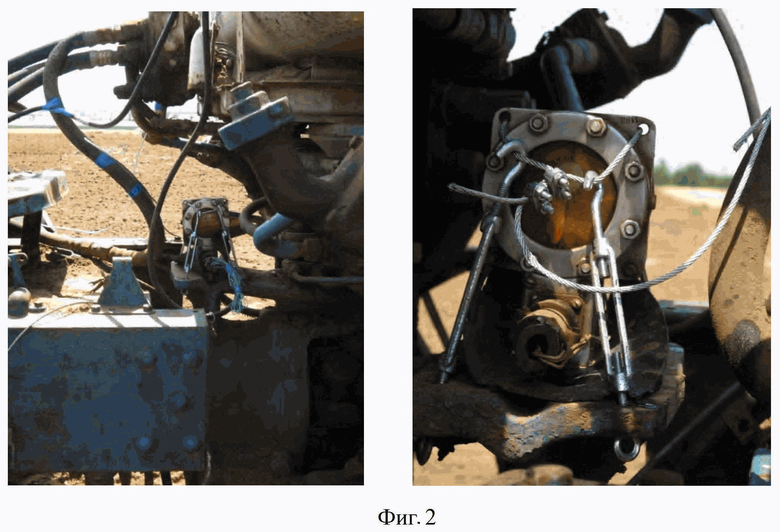
Устройство для определения буксования колесного трактора, включающее модуль беспроводной связи, аккумулятор, регистрирующее устройство, отличающееся тем, что устройство состоит из корпуса, в котором расположен аккумулятор, в качестве аккумулятора используют литий-полимерный аккумулятор, в качестве регистрирующего устройства используют акселерометр, установленный в центре масс трактора, посредством которого регистрируют ускорение центра масс трактора в виде осциллограммы, акселерометр выполнен отдельным блоком с обеспечением возможности приема, регистрации, преобразования зарегистрированных сигналов посредством сигнальных проводов на плату устройства, расположенную в корпусе устройства, в качестве модуля беспроводной связи используют жестко закрепленные в корпусе GPRS-модуль и ГЛОНАСС+GPS-модуль, с помощью которых выполнена связь с удаленным персональным компьютером посредством ретрансляционного и спутникового сигнала соответственно через закрепленные на корпусе устройства передающие антенны, при этом на удаленном персональном компьютере для интегрирования полученной от акселерометра осциллограммы и определения значения буксования установлены приемные антенны ретрансляционного и спутникового сигналов.
| УСТРОЙСТВО для ФАЗОВОГО УПРАВЛЕНИЯ ВЕНТИЛЯМИ УПРАВЛЯЕМОГО ВЫПРЯМИТЕЛЯ | 0 |
|
SU184333A1 |
| Препарат муковит В12 | 1958 |
|
SU118587A1 |
| US 9849782 B2, 26.12.2017 | |||
| Планшет для графического способа стрельбы зенитной артиллерии | 1927 |
|
SU14525A1 |
| Устройство для измерения буксования ведущих колес трактора | 1989 |
|
SU1695234A1 |
