Изобретение относится к транспортному машиностроению, а именно к антиблокировочным системам (АБС), противобуксовочным системам (ПБС) и системам курсовой устойчивости (СКУ) грузовых автомобилей, автобусов и прицепов. Известны способы управления АБС/ПБС транспортными средствами, при которых по сигналам с датчика скорости колеса вычисляется скорость, ускорение колес, скорость транспортного средства и величины проскальзывания, буксования колес. Полученные величины проскальзывания, буксования и ускорения колес сравнивают с заданными пороговыми величинами - «уставками». При достижении их равенства подаются управляющие команды на изменение тормозного или крутящего момента колес (Патент США 4969100, кл. G01P 3/4, 1990; Патент США 5224043, кл. В60Т 8/32, 1993; Патент США 5012417, кл. В60Т 8/32, 1991; Патент РФ 2038235. Противоблокировочная тормозная система автопоезда. A.M. Ахметшин, A.M. Будяк. Опубл, в Б.И., 1995, №18).
Все эти способы управления имеют ряд существенных недостатков и основаны на использовании зависимости коэффициента сцепления колеса ФХ с опорной поверхностью от степени проскальзывания (буксования) колеса S. Задачей управления АБС/ПБС по известному способу является поддержание величины проскальзывания или буксования колеса в узком интервале значений вблизи Sкp, соответствующему максимальному значению ФХ. Задача нахождения текущего значения Sкp, соответствующего максимальному значению ФХ, по кинематическим параметрам колеса не может быть решена, так как ни одна из текущих координат максимального значения ФХ диаграммы ФХ-S непосредственно не может быть измерена. Поэтому заранее задается ожидаемая вероятная величина Sкp - «уставка». Действительная величина Sкp может изменяться в широких пределах в процессе движения - от 0,1 (на мокрых дорогах и гололедице) до 0,8 (на сухом асфальте). Поэтому подводимый к колесу тормозной или крутящий момент может не соответствовать максимальному значению ФХ.
Практическое использование параметра проскальзывания (буксования) вызывает ряд затруднений, так как в процессе торможения невозможно вычислить скорость автомобиля по датчику угловой скорости колеса, к тому же определение линейной скорости автомобиля вносит погрешности в процесс регулирования, в связи с чем этот способ регулирования не обеспечивает адаптивности АБС/ПБС. При этом «уставка» по заданной величине проскальзывания (буксования) не может обеспечить оптимальные тормозной или тяговый режимы в различных дорожных условиях, когда максимальная величина ФХ соответствует Sкp, значительно отличающейся от заданной «уставки» (А.К. Фрумкин. Регуляторы тормозных сил и антиблокировочных систем. М., 1981).
Использование такого параметра, как ускорение колеса не устраняет полностью основного недостатка - отсутствия адаптации к дорожным условиям. Это связано с тем, что ускорение колеса, соответствующее началу блокирования или буксования колеса, зависит от множества факторов (Петров В.А. Теоретические основы разработки антиблокировочных систем. Автомобильная промышленность, 1984, №2).
В этих способах управления не использована информация о действительном значении радиальной нагрузки на колесо, необходимой для обеспечения оптимального управления АБС/ПБС. Это приводит к тому, что при движении транспортного средства на крутых поворотах, дорогах с уклонами АБС/ПБС могут снижать тормозную и тяговую эффективность из-за перераспределения нагрузок на колеса. Применение известных АБС/ПБС с таким способом управления для полноприводных транспортных средств связано с необходимостью решения ряда технически сложных задач.
Предложенные меры по улучшению функционирования АБС/ПБС при движении транспортного средства на поворотах (Патент США 5504680, кл. В60К 28/16, 1996; Патент США 4902076, кл. В60Т 8/58, 1990), на дорогах с уклонами (Патент США 4964047, кл. В60Т 8/32, 1990; Патент США 5458212, кл. В60К 28/16, 1995) и при использовании АБС/ПБС для полноприводных транспортных средств (Патент США 5009279, кл. В60К 28/16, 1991) приводят к значительному усложнению АБС/ПБС и увеличивают их стоимость, что не всегда приемлемо. Эти способы управления недостаточно помехоустойчивы из-за использования в управлении АБС/ПБС кинематических параметров колеса, степени проскальзывания, буксования и ускорения колеса в условиях помех, вызванных неровностями дороги, колебаниями масс автомобиля, которые могут приводить к появлению ложных или несвоевременных команд. Работа АБС/ПБС становится не эффективной, сопровождается сбоями.
Рассмотренные способы управления АБС/ПБС по своему принципу действия не обеспечивают поддержания тормозного или тягового режима в области максимального значения коэффициента сцепления колеса с дорогой. Найти предельную величину подводимого тормозного или крутящего момента к колесу без блокирования или буксования практически невозможно. Таким АБС/ПБС в юзовом режиме свойственны колебания тормозного или крутящего момента. При больших амплитудах циклических колебаний нарушается комфортабельность (появляется дергание), а элементы конструкции автомобиля испытывают дополнительные динамические нагрузки.
Известные способы управления АБС/ПБС требуют производить сложные и громоздкие вычисления с наличием сложных вычислительных средств - микропроцессоров, имеющих сложный алгоритм функционирования, что снижает надежность, увеличивает стоимость АПБЛТБС и их эксплуатации.
Тем не менее, в соответствии с Соглашением «О принятии единообразных технических предписаний для колесных транспортных средств, предметов оборудования и частей, которые могут быть установлены и/или использованы на колесных транспортных средствах, и об условиях взаимного признания официальных утверждений, выдаваемых на основе этих предписаний» Добавление 12: Правила №13, пересмотр 8, пункт 5.2.1.32, 3 марта 2014 - все современные транспортные средства должны быть оснащены системами курсовой устойчивости, предназначенными устранить отмеченный выше недостаток и обеспечить курсовую устойчивость, а также предотвратить опрокидывание во время выполнения маневров.
В результате этого современные системы безопасности транспортных средств оснащаются СКУ (например, электронный блок управления СКУ WABCO с серийным номером №4460650520, EBS3 - Тормозная система с электронным управлением. Описание системы, URL: www.wabco-auto.com), в состав которой входит датчик угловой курсовой скорости вокруг вертикальной оси ТС и линейных ускорений с осями чувствительности, лежащий в плоскости рамы и направленных вдоль продольной и поперечной осей ТС. При этом АБС, ПБС и СКУ работают автономно и не зависят друг от друга.
В этом случае можно создать оптимальные по отдельности системы АБС/ПБС/СКУ, однако вся система АБС/ПБС/СКУ будет неоптимальной. Для того, чтобы синтезировать оптимальную систему АБС/ПБС/СКУ, ее необходимо сделать полностью наблюдаемой, то есть кроме измерения угловой скорости вокруг оси Z(ωZ) и линейных ускорений по осям X и Y ( ,
, ), необходимо измерять угловые скорости вокруг осей X и Y (ωX, (ωY), а. также линейное ускорение вдоль оси Z (
), необходимо измерять угловые скорости вокруг осей X и Y (ωX, (ωY), а. также линейное ускорение вдоль оси Z ( ).
).
Данный недостаток частично устранен в известных способе и системе электронного контроля устойчивости (СКУ) для транспортного средства (Европейский патент №2374676 (А1), МПК В60Т 8/1755, опубликовано 2011-10-12), в которых в состав АБС/ПБС/СКУ введена навигационная система -система позиционирования, измеряющая параметры движения ТС - скорость и координаты его движения. Электронный блок управления (ЭБУ) запрограммирован на уменьшение бокового заноса транспортного средства путем уменьшения разницы между предполагаемым направлением транспортного средства и/или скоростью рыскания и фактическим направлением транспортного средства и/или скоростью рыскания путем внесения изменений в работу тормозов транспортного средства и/или блока управления двигателем. Система СКУ получает входные данные от датчиков скорости вращения колес, датчика положения рулевого колеса, датчика скорости рыскания и датчика поперечного ускорения. Система СКУ также получает ввод, который указывает, по крайней мере, свойство дороги, на которой находится транспортное средство, при этом дорога, на которой находится транспортное средство, определяется из системы позиционирования, которая использует базу данных карт, а свойство определяется из карты базы данных.
Недостатком описанного метода является то, что используемая в работе СКУ система позиционирования имеет заранее загруженную базу данных дорог для определения сцепления ТС с дорогой, в которую не вносятся оперативные изменения (например, при осадках или обледенении дороги), что может привести к ошибкам в работе всей системы. Помимо этого, система позиционирования имеет «слепые» зоны: туннели, леса, плотная застройка, где невозможно определить точное местоположение ТС. Также хранение базы данных дорог требует большой объем памяти, что требует использование мощного микропроцессора.
Данный недостаток, в свою очередь, частично устранен в заявке на изобретение US 2019322256 (А1) от 24.10.2019, в соответствии с которой в состав АБС/ПБС/СКУ для ТС с прицепом в колеса прицепа дополнительно введены колесные модули, установленные на ободе колес, содержащие датчик ускорения, который соединен с соответствующим вращающимся колесом, и передатчик для беспроводной передачи информационного сигнала с датчика ускорения о радиальном и касательном ускорении колеса в блок управления АБС/ПБС/СКУ.
Недостатком данного способа является то, что используемая беспроводная передачи информационного сигнала подвержена сбоям в работе Недостатком данного способа является то, что используемая беспроводная передачи информационного сигнала подвержена сбоям в работе из-за внешних электромагнитных воздействий. Кроме этого, для работы колесного модуля требуется сложная беспроводная система с электрическим питанием.
Известен способ управления опрокидыванием для транспортного средства (патент DE10344835 В4, В60Т, 03.11.2005 параграфы 6, 20, 17-31 всего 10 с.), включающий следующие этапы: определение угла поворота, скорости колеса (оборотов в минуту - об / мин), угла крена, скорости крена, скорости рыскания и скорости транспортного средства, определяемых в соответствии с изменение условий движения транспортного средства; Обработка угла поворота и скорости вращения колес, обнаруженных таким образом, с помощью уравнения динамики транспортного средства, чтобы вычислялись продольная скорость, поперечная скорость, скорость рыскания, скорость крена, угол крена, угол скольжения и коэффициент скольжения; Прогнозирование временно генерируемого угла скольжения, в то время как скорость рыскания, скорость крена, угол крена и скорость транспортного средства, обнаруженные таким образом, и значения, вычисленные с использованием уравнения динамики транспортного средства, обрабатываются фильтром Калмана (220); Расчет поперечной силы в шине на основе предсказанного таким образом угла скольжения; Выполнение подпрограммы принятия решения перед опрокидыванием, с помощью которой оценивается возможность возникновения опрокидывания на основе вычисленной таким образом поперечной силы шины; Прогнозирование боковой скорости с использованием фильтра Калмана (220) в подпрограмме принятия решения перед опрокидыванием, когда существует вероятность того, что опрокидывание произойдет; и выполнение подпрограммы принятия решения об опрокидывании, с помощью которой оценивается опрокидывание на основе предсказанной таким образом поперечной скорости.
В немецком патенте речь идет о системе управления опрокидыванием транспортного средства и защите пассажиров путем автоматического регулирования натяжения ремней безопасности.
Однако наличие очевидных ошибок в признаках формулы изобретения, а именно, в математических уравнениях ставит под сомнение осуществимость и работоспособность заявленных в нем способа и системы.
В патенте РФ №2324611 от 20.05.2008, принимаемом в качестве прототипа, предложен способ управления АБС/ПБС транспортного средства в процессе торможения или тягового режима, в котором вычисляют производную по времени функции квадрата сигнала датчика скорости вращения колеса, затем электрический сигнал, пропорциональный производной, подают в экстремальный регулятор, находят экстремум сигнала, соответствующего экстремуму тормозной или тяговой мощности на колесе и максимальному сцеплению колеса с опорной поверхностью, поддерживают текущее значение сигнала вблизи экстремума, при отклонении сигнала от экстремума больше установленной величины по сигналам экстремального регулятора формируют и подают управляющие сигналы на модулятор давления тормозного привода или на устройства регулирования крутящего момента и проводят операцию уменьшения/увеличения давления в тормозном приводе или крутящего момента колеса.
Экстремум сигнала находят по методу запоминания экстремума или по приращению сигнала.
Управление торможением или тяговым режимом осуществляют раздельно для каждого колеса или для группы колес блоком управления АБС/ПБС, объединенным с модулятором давления в один узел и подключенным к датчику скорости вращения колеса.
Однако данный способ также обладает существенным недостатком, т.к. экстремум функции определяют по вычислению производной по времени
С другой стороны АБС/ПБС работают автономно и оптимальны по коэффициентам сцепления каждого колеса. Однако коэффициенты сцепления каждого колеса отличаются друг от друга, углы увода и поворота управляемых колес по одной оси не равны друг другу, а касательные реакции, действующие на правое и левое колесо одной оси, не одинаковы (в том числе и в случае создания стабилизирующих воздействий за счет изменения крутящих моментов на ведущих колесах). Это приводит к появлению боковых сил.
Проблема заключается в том, что, как показали исследования, в случае действия боковой силы, приложенной в центре тяжести транспортного средства (далее ТС) с любым типом привода и схемой рулевого управления, упомянутые ТС начинают совершать криволинейное движение, несмотря на то, что угол поворота управляемых колес равен нулю (Жилейкин М.М. Теоретические основы повышения показателей устойчивости и управляемости колесных машин на базе нечеткой логики. М: Издательство МГТУ им. Н.Э. Баумана, 2016. 238 .с).
Задача состоит в том, чтобы оснастить современные транспортные средства системами динамической стабилизации, предназначенными устранить отмеченный выше недостаток и обеспечить курсовую устойчивость, а также предотвратить опрокидывание во время выполнения маневров.
Техническим результатом является создание способа управления АБС/ПБС/СКУ и устройства для его осуществления, позволяющих существенно уменьшить погрешности определения параметров движения транспортного средства для обеспечения динамической устойчивости, предотвращения опрокидывания и повышения безопасности режима экстренного торможения.
Предпосылками для обеспечения работы систем АБС/ПБС/СКУ в одном устройстве является применение микромеханического бесплатформенного инерциального блока (МБИБ), состоящего из микромеханических акселерометров и гироскопов, а также высокопроизводительного микроконтроллера, датчиков угловой скорости колес и угла поворота рулевого колеса, модуляторов давления тормозного привода и дифференциальных клапанов на ведущей и передней осях.
Технический результат достигается для способа управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства в процессе торможения или тягового режима, в соответствии с которым обрабатывают электрические сигналы, характеризующие динамику колес, в том числе, скорости вращения колес, вычисляют параметры, характеризующие сцепление колес с опорной поверхностью, находят по методу приращений экстремум сигнала, характеризующего динамику колес, в соответствии с которым уменьшают/увеличивают давление в тормозном приводе колес раздельно для каждого колеса или группы колес посредством электронного блока управления антиблокировочной системы и/или противобуксовочной системы транспортного средства, тем, что в режиме экстренного торможения транспортного средства дополнительно обрабатывают электрические сигналы, характеризующие его динамику, а экстремум сигнала, характеризующего динамику колес, задают из условия исключения их проскальзывания и одновременно по состоянию угла наклона поперечной оси транспортного средства предотвращают его опрокидывание, сбрасывая тягу двигателя.
Кроме того, для получения электрических сигналов, характеризующих динамику транспортного средства, используют микромеханический бесплатформенный инерциальный блок.
Кроме того, в качестве электрических сигналов, характеризующих динамику транспортного средства, используют продольную скорость, полученную интегрированием сигнала о продольном ускорении, угол разворота продольной оси вокруг вертикальной оси и угол наклона поперечной оси транспортного средства относительно плоскости местного горизонта.
Кроме того, при задании экстремума сигнала, характеризующего динамику колес, по сигналам о скорости их вращения определяют линейную скорость колес автомобиля, коэффициенты скольжения каждого колеса и суммарный коэффициент сцепления транспортного средства с опорной поверхностью, вычисляют коэффициенты сцепления для каждого колеса, определяют экстремумы коэффициентов сцепления от коэффициентов скольжения каждого колеса по методу приращений и, в соответствии с этими экстремумами, формируют управляющие сигналы для изменения давления в тормозном приводе колес.
Кроме того, одновременно, для предотвращения опрокидывания транспортного средства, определяют текущее значение угла наклона поперечной оси транспортного средства относительно плоскости местного горизонта и сравнивают его с заданным углом отрыва колес от опорной поверхности, причем, в случае достижения текущего значения угла наклона величины заданного угла отрыва с коэффициентом запаса, равным 0,5, производят сброс тяги двигателя.
Кроме того, одновременно с сигналами о скорости вращения колес определяют сигналы тангенциального и радиального ускорения колес и с их учетом определяют коэффициенты сцепления для каждого колеса.
Указанный технический результат достигается также для устройства управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства, содержащего датчики угловой скорости колес, подключенные к электронному блоку управления, модулятор давления тормозного привода каждого колеса и блок управления двигателем, тем, что в устройство введены микромеханический бесплатформенный инерциальный блок, датчик угла поворота рулевого колеса и блок дифференциальных клапанов на ведущей и передней осях, электронный блок управления содержит микропроцессор, узел контроля и блок ключей, причем микромеханический бесплатформенный инерциальный блок подключен к первому входу микроконтроллера, ко второму входу которого подключены датчики угловой скорости колес, к его третьему входу подключен датчик угла поворота рулевого колеса, к первому выходу - узел контроля, ко второму выходу - блок ключей, а к третьему - блок управления двигателем, первый выход блока ключей подключен к модулятору давления тормозного привода каждого колеса, второй выход - ко второму входу узла контроля, третий выход - к блоку дифференциальных клапанов на ведущей и передней осях, второй вход которого подключен к выходу модулятора давления тормозного привода каждого колеса, второй выход модулятора давления тормозного привода каждого колеса подключен к третьему входу узла контроля электронного блока управления, а третий - соединен с тормозными камерами каждого колеса.
Кроме того, микромеханический бесплатформенный инерциальный блок выполнен на основе трех ортогонально расположенных микромеханических акселерометров и трех микромеханических гироскопов с цифровым выходом по интерфейсу CAN.
Кроме того, на датчики угловой скорости колес жестко установлены двухосные микромеханические акселерометры с ортогонально расположенными осями чувствительности, направленными вдоль продольной оси и вертикальной оси транспортного средства, а их выходы подключены ко второму входу микропроцессора.
Кроме того, входы и выходы микропроцессора выполнены с возможностью соединения по интерфейсу CAN.
Предлагаемый способ управления АБС/ПБС/СКУ и устройство для его осуществления поясняется следующими рисунками.
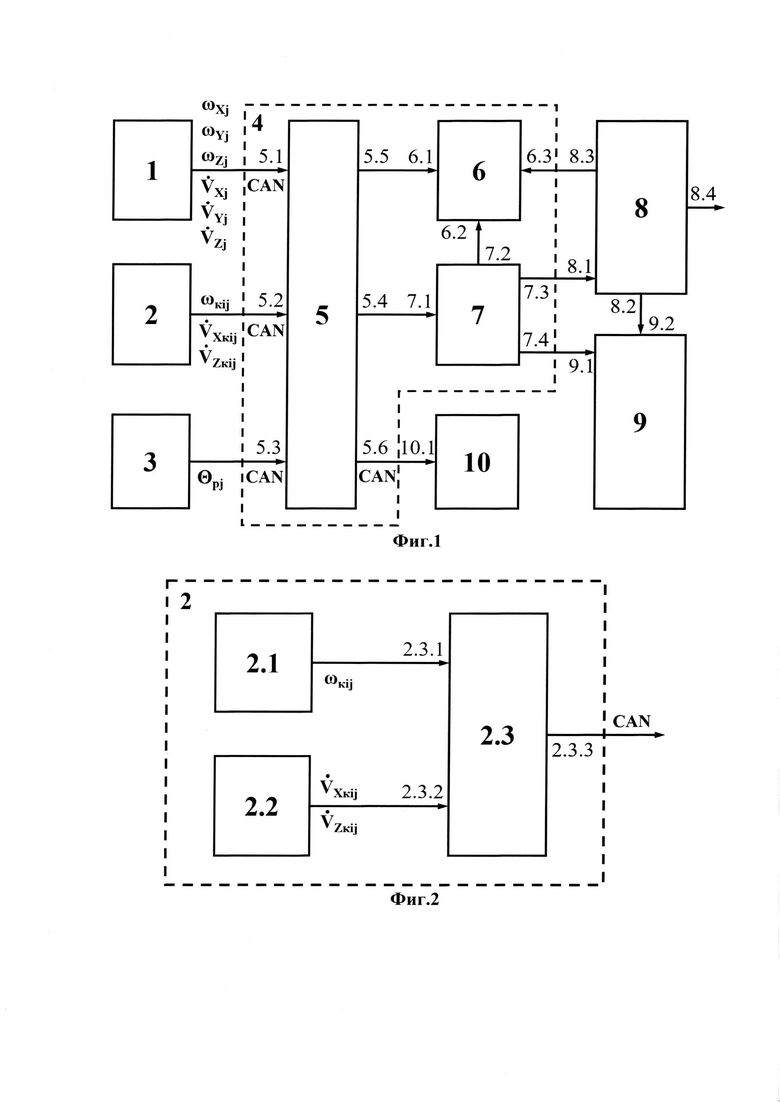
На фиг. 1 приведена блок схема системы АБС/ПБС/СКУ.
На фиг. 2 приведена блок-схема датчика угловой скорости и линейных ускорений колес.
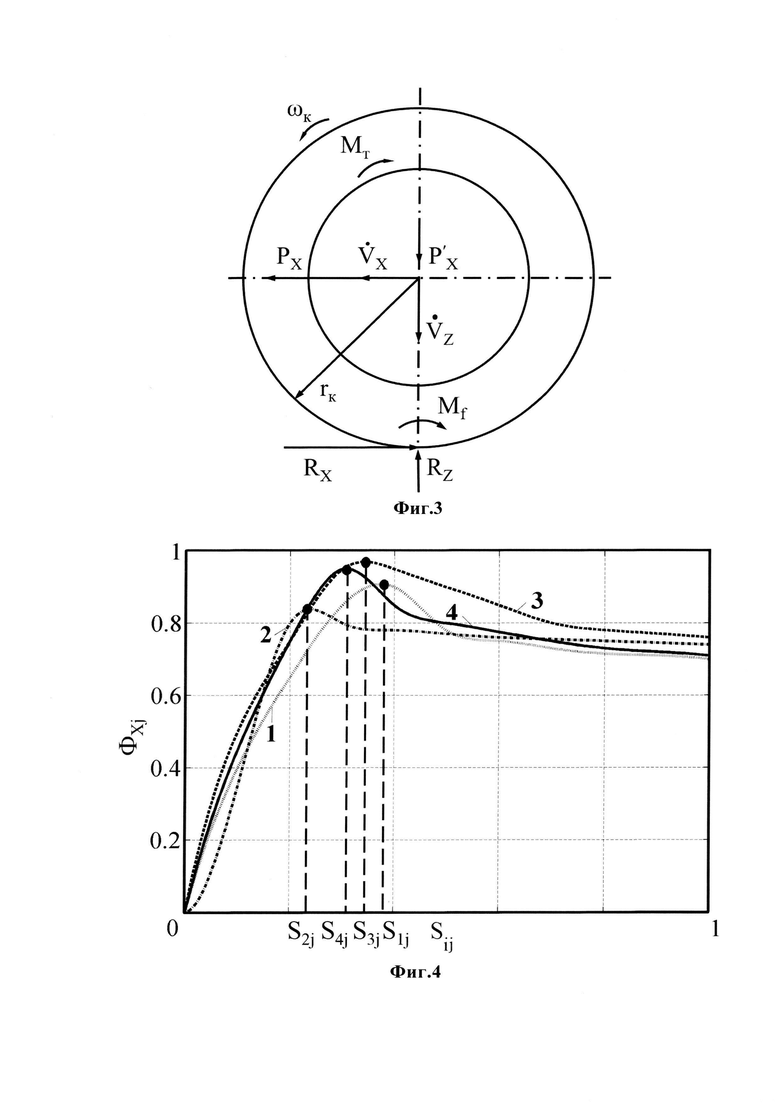
На фиг. 3 показаны силы и моменты, действующие на колеса во время торможения и система координат, связанная с колесом.
На фиг. 4 представлен пример зависимости коэффициента сцепления ФХ от коэффициента скольжения S (Фх-S диаграмма) для 4 колес при одинаковых дорожных условиях.
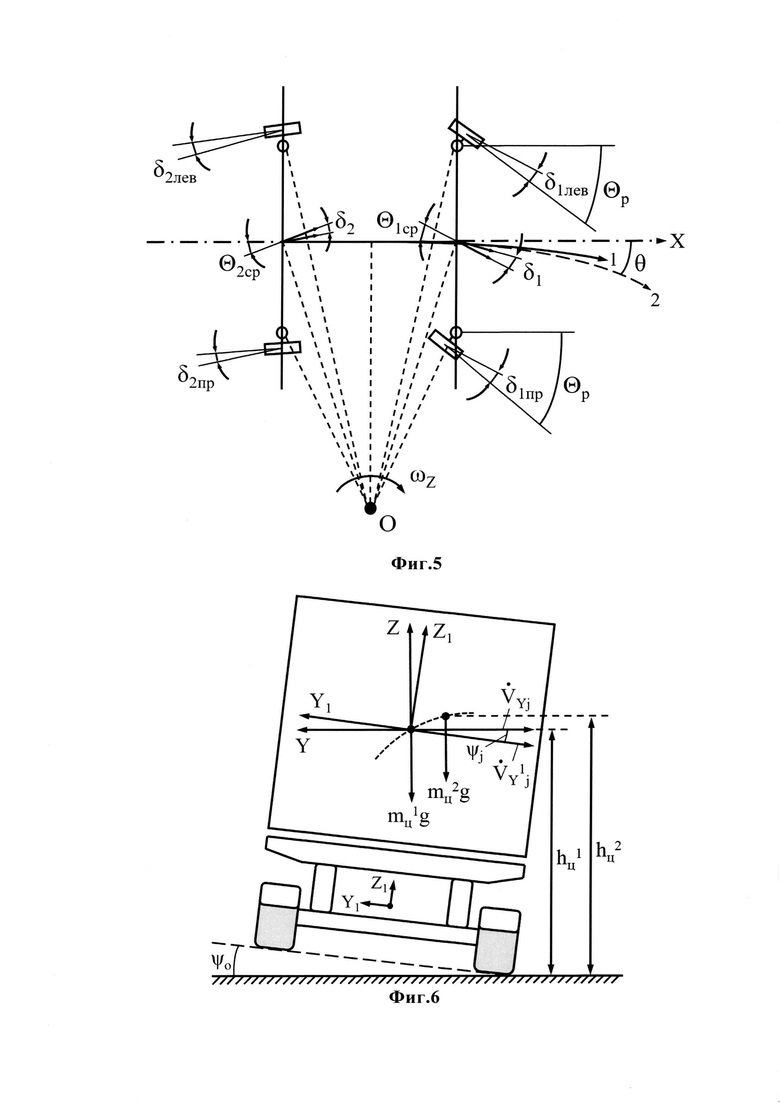
На фиг. 5 показаны углы увода и поворота осей автомобиля в повороте по часовой стрелки.
На фиг. 6 показано перемещение центра масс автомобиля после появления крена.
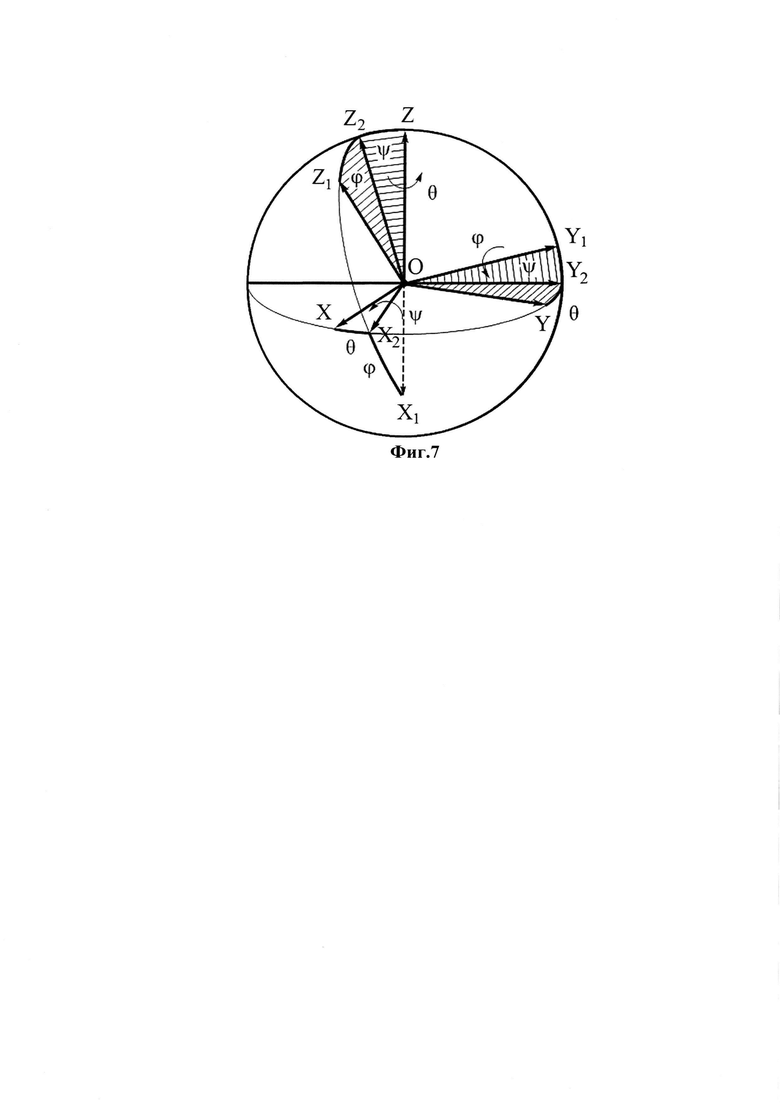
На фиг. 7 приведена системы координат, связанная с центром масс автомобиля.
Представленный на рисунках вариант выполнения устройства и его элементов приведен, прежде всего, в целях иллюстрации и не должен быть истолкован как ограничение объема притязаний.
На фиг. 1 обозначено:
1 - МБИБ;
2 - датчики угловой скорости и линейных ускорений колес 1-4;
3 - датчик угла поворота рулевого колеса;
4 - электронный блок управления (ЭБУ);
5 - микропроцессор (МП);
6 - узел контроля;
7 - блок ключей;
8 - модуляторы давления воздуха 1-4;
9 - дифференциальный клапан на ведущей и передней осях;
10 - блок управления двигателем;
ωXj, ωyj, ωZj - текущие угловые скорости автомобиля вокруг осей X, Y, Z;
 - текущие линейные ускорения автомобиля по осям X, Y, Z;
- текущие линейные ускорения автомобиля по осям X, Y, Z;
 - текущие линейные ускорения i-го колеса по осям X и Z;
- текущие линейные ускорения i-го колеса по осям X и Z;
ωkij - текущая угловая скорость i-ro колеса;
 - текущий угол поворота рулевого колеса;
- текущий угол поворота рулевого колеса;
 - количество отсчетов;
- количество отсчетов;
 - количество колес.
- количество колес.
На фиг. 2 обозначены:
2 - датчик угловой скорости и линейных ускорений колес;
2.1 - датчик угловой скорости колеса;
2.2 - двухосный акселерометр;
2.3 - микроконтроллер (МК);
 - текущее значение тангенциального ускорения i-го колеса;
- текущее значение тангенциального ускорения i-го колеса;
 - текущее значение радиального ускорения i-го колеса;
- текущее значение радиального ускорения i-го колеса;
ωrij - текущая угловая скорость i-го колеса.
На фиг. 3 обозначено:
ωк - угловая скорость колеса;
кк - радиус колеса;
 - линейное ускорение автомобиля по оси X;
- линейное ускорение автомобиля по оси X;
- линейное ускорение автомобиля по оси Z;
Рх - сила реакции колеса с продольной осью;
 - толкающая сила;
- толкающая сила;
Mf - момент сопротивления качению колеса;
Мт - момент, создаваемый на колесе тормозным приводом;
RX - продольная реакция колеса с тормозной опорой (тормозная сила);
RZ - нормальная реакция колеса.
На фиг. 4 обозначены:
1 - коэффициент сцепления в продольном направлении колеса 1;
S1j - текущее значение коэффициента скольжения 1 колеса;
2 - коэффициент сцепления в продольном направлении колеса 2;
S2j - текущее значение коэффициента скольжения 2 колеса;
3 - коэффициент сцепления в продольном направлении колеса 3;
S3j - текущее значение коэффициента скольжения 3 колеса;
4 - коэффициент сцепления в продольном направлении колеса 4;
S4j - текущее значение коэффициента скольжения 4 колеса.
На фиг. 5 обозначены:
1 - идеальная траектория ТС;
2 - реальная траектория ТС;
О - мгновенный центр поворота;
ωZ - угловая скорость автомобиля вокруг оси Z;
 - средний угол поворота колес 1 (передней) оси;
- средний угол поворота колес 1 (передней) оси;
 - средний угол поворота колес 2 (задней) оси;
- средний угол поворота колес 2 (задней) оси;
δ1 - средний угол увода колес 1 (передней) оси;
δ1 лев - средний угол увода левого колеса передней оси;
δ1пр - средний угол увода правого колеса передней оси;
δ2 - средний угол увода колес 2 (задней) оси;
δ2 лев - средний угол увода левого колеса задней оси;
δ2пР - средний угол увода правого колеса задней оси;
ΘР - угол поворота рулевого колеса;
θ - угол разворота продольной оси транспортного средства (угол рыскания).
На фиг. 6 обозначены:
mц1 - положение центра масс автомобиля при отсутствии крена; )
mц2 - положение центра масс автомобиля при наличии крена;
g - ускорение свободного падения;
mц1g - сила тяжести, действующая на центр масс ТС в отсутствии крена;
mц2g - сила тяжести, действующая на центр масс ТС при наличии крена;
 - текущее поперечное ускорение, действующее на автомобиль в повороте до появления крена;
- текущее поперечное ускорение, действующее на автомобиль в повороте до появления крена;
 - текущее поперечное ускорение, действующее на автомобиль в повороте при наличии крена;
- текущее поперечное ускорение, действующее на автомобиль в повороте при наличии крена;
ψj - текущий угол крена транспортного средства;
ψo - угол отрыва колес транспортного средства;
 - расстояние от опорной поверхности до центра масс ТС в отсутствии крена;
- расстояние от опорной поверхности до центра масс ТС в отсутствии крена;
 - расстояние от опорной поверхности до центра масс ТС при наличии крена;
- расстояние от опорной поверхности до центра масс ТС при наличии крена;
YZ - оси географической системы координат OXYZ (центр О и ось X не показаны);
Y1Z1 - оси приборной и автомобильной систем координат OX1Y1Z1 (центр О и ось X1 не показаны).
На фиг. 7 приведены:
OXYZ - географическая система координат;
OX1Y1Z1 - система координат, связанная с рамой автомобиля и совпадающая с приборной системой координат (ПСК) МБИБ;
OX2Y2Z2 - вспомогательная система координат, используемая для связи географической и ПСК;
ψ - угол крена ПСК;
ϕ - угол дифферента ПСК;
θ - угол рыскания ПСК.
При осуществлении способа управления антиблокировочной системой (АБС), противобуксовочной системой (ПБС) и системой курсовой устойчивости (СКУ) транспортного средства в процессе торможения или тягового режима, для формирования управляющих сигналов, необходимых для работы СКУ, используется МБИБ, датчики угловых скоростей колес и датчик угла поворота рулевого колеса, на основе информации с которых вычисляются углы увода колес - углы крена ф и рыскания 9. При этом для предотвращения опрокидывания необходимо, чтобы текущий угол крена был меньше угла отрыва колес ф0, а для стабилизации движения по курсу необходимо исключить рассогласование угла курса и угла поворота рулевого колеса. При этом уменьшается погрешность управления за счет исключения операций дифференцирования и учета всех факторов движения. Для работы АБС/ПБС на основе МБИБ и датчика угловой скорости и линейного ускорения колес высчитываются значения коэффициентов проскальзывания и коэффициентов сцепления каждого колеса. В этом случае управляющим сигналом является значение коэффициента сцепления, которое поддерживается на максимальном уровне. На каждом шаге отсчета вычисляются:
- продольная скорость VX автомобиля,
- угол разворота продольной оси θ ТС,
- угол наклона поперечной оси автомобиля ψ относительного плоскости местного горизонта,
- линейная скорость i-ro колеса Vкi,
- коэффициент скольжения каждого колеса по продольной оси Si,
- суммарный коэффициент сцепления каждого колеса по продольной оси ФХ∑ с опорной поверхностью,
и далее определяется критическое значения коэффициента скольжения Sкp для каждого колеса, после чего формируется сигнал управления.
Блок схема устройства управления АБС/ПБС/СКУ приведена на фиг. 1. Устройство для управления антиблокировочной, противобуксовочной систем и системы курсовой устойчивости транспортного средства содержит микромеханический бесплатформенный инерциальный блок (МБИБ) 1, датчик угловой скорости и линейного ускорения колес 2 (2.1 и 2.2 - см. фиг. 2) и датчик угла поворота рулевого колеса 3. Выходы с датчиков 1-3 по интерфейсу CAN подключены к входам 5.1-5.3 микропроцессора (далее МП) 5 электронного блока управления (ЭБУ) 4. Выход 5.4 МП 5 соединен с входом
7.1 блока ключей 7, выход 5.5 соединен с входом 6.1 узла контроля 6, а выход 5.6 соединен с входом 10.1 блока управления двигателем 10. Выход 7.2 блока ключей 7 и выход 8.3 модулятора 8 соединены с соответствующими входами
6.2 и 6.3 узла контроля 6. Выход 7.3 блока ключей 7 соединен с входом 8.1 модулятора давления тормозного привода 8 колес 1-4, выход которого 8.4 соединен с тормозными камерами каждого колеса. Выход 8.2 модулятора 8 соединен с входом 9.2 блока дифференциальных клапанов 9 ведущей и передней осей. Выход 7.4 блока ключей 7 соединен с входом 9.1 блока дифференциальных клапанов 9 ведущей и передней осей.
Блок-схема датчика угловой скорости и линейных ускорений колеса представлена на фиг. 2. Сигнал с датчика угловой скорости колеса 2.1 подается на вход 2.3.1 микроконтроллера (МК) 2.3, а сигнал с двухосного акселерометра 2.2 подается на вход 2.3.2 МК 2.3. Выход 2.3.3 МК 2.3 через интерфейс CAN соединен с входом 5.2 МП 5 ЭБУ 4 (см. фиг 1).
Работа АБС/ПБС/СКУ заключается в следующем.
В режиме АБС сигналы датчиков угловых скоростей колес 2 постоянно поступают на вход электронного блока управления (ЭБУ) 4. Сигналы колесных датчиков преобразовываются в прямоугольные импульсы, частота которых эквивалентна угловой скорости колеса. При торможении автомобиля в соответствии с выбранным законом (алгоритмом) управления АБС при возникновении опасности блокирования колеса ЭБУ выдает управляющий сигнал на блок ключей 7, который, в свою очередь, подает напряжение питания (24 В) на обмотки катушек клапана отсечки и клапана сброса соответствующего модулятора давления 8 в тормозной камере. В этом случае перекрывается подача сжатого воздуха в тормозную камеру, и одновременно тормозная камера сообщается с атмосферой. Происходит быстрый сброс давления воздуха в тормозной камере, уменьшается тормозной момент, приложенный к колесу, и предотвращается блокирование колеса. В дальнейшем колесо начинает ускоряться, и частота сигнала датчика угловой скорости колеса 2 увеличивается. В соответствии с алгоритмом управления, при достижении определенного значения угловой скорости колеса или ее производных, ЭБУ 4 через блок ключей отключает напряжение на обмотке катушки клапана сброса модулятора давления 8. Падение давления воздуха в тормозной камере прекращается и происходит выдержка давления на постоянном уровне. При дальнейшем росте частоты сигнала скорости колеса ЭБУ 4 и блок ключей 7 обесточивают обмотку катушки клапана отсечки и сбрасывают давление в тормозной камере, в результате чего тормозной момент начинает повышаться. Цикл повторяется до полной остановки автомобиля.
По сигналам датчиков скорости вращения колес 2 в МП 5 вычисляются текущие линейные скорости колес Vkij автомобиля (фиг. 3), а по информации с продольного акселерометра МБИБ 1 путем интегрирования вычисляются текущая продольная скорость VXj транспортного средства в соответствии с формулами:
где ωкjj - текущая угловая скорость i-го колеса, rкi - радиус i-го колеса, VX0 - начальная скорость автомобиля (в момент начала торможения),  текущее продольное ускорение автомобиля, τ - время интегрирования.
текущее продольное ускорение автомобиля, τ - время интегрирования.
Текущие коэффициенты скольжения каждого колеса Si в МП 5 находятся по выражению:
где Vkij - текущая линейная скорость i-ro колеса.
При этом текущий суммарный коэффициент сцепления  (фиг. 4) находится из соотношения:
(фиг. 4) находится из соотношения:
где  - текущее радиальное ускорение автомобиля.
- текущее радиальное ускорение автомобиля.
Определяются текущие значения коэффициентов сцепления ФХij от коэффициентов скольжения каждого колеса Sjj и определяются экстремумы текущих коэффициентов сцепления  от коэффициентов скольжения каждого колеса по методу приращений:
от коэффициентов скольжения каждого колеса по методу приращений:
если 
если 
По методу приращения формируется управляющий сигнал, который уменьшает/увеличивает давление через модулятор в тормозном приводе колес раздельно для каждого колеса или группы колес блоком управления.
В режиме ПБС в тяговом режиме движения автомобиля при трогании автомобиля с места, когда к ведущим колесам транспортного средства прикладывается тяговый момент превышающий момент сцепления ведущих колес, происходит буксование ведущих колес. Сигналы датчиков угловых скоростей ведущих колес 2 поступают в ЭБУ 4 и обозначают наличие вращения колес, в то время как скорость автомобиля близка к нулю (сигнал с датчиков угловых скоростей передних колес отсутствует или слишком мал). В этом случае ЭБУ 4 через блок ключей 7 подает напряжение на обмотки дифференциальных клапанов 9, установленных перед тормозными камерами, и сжатый воздух поступает из воздушного баллона в тормозную камеру буксующего колеса. Происходит притормаживание колеса и уменьшение его угловой скорости. Одновременно ЭБУ подает управляющий сигнал на блок управления двигателем 10, уменьшающий подачу топлива в двигатель и, следовательно, тяговый момент на ведущих колесах автомобиля. При определенных значениях угловой скорости ведущих колес и скорости автомобиля происходит отключение напряжения на обмотке дифференциального клапана 9, торможение колеса прекращается и цикл повторяется до тех пор, когда скорость автомобиля возрастет до значения, как правило, выше 15 км/ч ПБС отключается.
В режиме СКУ сигналы от МБМБ 1 по шине CAN поступают на вход ЭБУ 4 и несут информацию об проекциях на три оси системы координат угловых скоростей и ускорений автомобиля. Одновременно с датчика угла поворота рулевого колеса 3 информация по шине CAN поступает также на вход ЭБУ 4. В соответствии с алгоритмом управления курсовой устойчивостью автомобиля при выполнении маневра перемены полосы движения или при движении в повороте, когда траектория движения транспортного средства отклоняется от заданной траектории движения, ЭБУ 4 выдает управляющие сигналы на блок управления двигателем 10 для уменьшения крутящего момента на ведущих колесах автомобиля, а также при необходимости через блок ключей 7 подает напряжение на обмотку дифференциального клапана 9 правого или левого колеса (в зависимости от конкретной ситуации).
Текущий угол разворота (угол рыскания, курсовой угол) продольной оси 0j транспортного средства (фиг. 5) вычисляется по формуле:
где θ0 - отклонение от направления по оси X в момент начала торможения, ωZj - текущая угловая скорость ТС вокруг оси Z.
Происходит притормаживание колеса и возникает стабилизирующий момент.
В случае угрозы отрыва колес автомобиля от опорной поверхности и опрокидывания при достижении критических значений поперечного ускорения ЭБУ 4 выдает управляющие сигналы на блок управления двигателем 10 для уменьшения скорости движения и одновременно на обмотки катушек дифференциальных клапанов 9 на передней и задней осях, расположенных по правому или левому борту автомобиля.
Текущий угол наклона поперечной оси транспортного средства относительно плоскости местного горизонта (фиг.6) рассчитывается по выражению:
где  - текущее поперечное ускорение автомобиля по оси Y ПСК (фиг. 7) при появлении крена в результате воздействия боковой силы.
- текущее поперечное ускорение автомобиля по оси Y ПСК (фиг. 7) при появлении крена в результате воздействия боковой силы.
Текущее значение ψj сравнивается с заданным углом отрыва колес ψ0, от опорной поверхности и, если текущее значение угла наклона ψj автомобиля становится равным углу отрыва ψo с коэффициентом запаса, равным 0,5, то есть если имеет место равенство ψj=0,5ψo, а также при наличии углового рассогласования δ≠0, происходит притормаживание колес правого или левого борта автомобиля. После устранения угрозы опрокидывания система приходит в исходное положение контроля движения.
Таким образом, достигается технический результат, которым является создание способа управления АБС/ПБС/СКУ и устройства для его осуществления, позволяющих существенно уменьшить погрешности определения параметров движения транспортного средства для обеспечения динамической устойчивости, предотвращения опрокидывания и повышения безопасности режима экстренного торможения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АНТИБЛОКИРОВОЧНОЙ И ПРОТИВОБУКСОВОЧНОЙ СИСТЕМОЙ (АБС/ПБС) ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2324611C2 |
| Способ управления торможением транспортного средства и устройство для его осуществления | 2022 |
|
RU2819157C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ МОБИЛЬНЫХ МАШИН | 1997 |
|
RU2125517C1 |
| Способ управления индивидуальным тяговым электроприводом ведущих колес многоколесного транспортного средства | 2023 |
|
RU2797069C1 |
| СПОСОБ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2005 |
|
RU2304531C2 |
| СПОСОБ ОЦЕНКИ ТОРМОЗНОЙ ЭФФЕКТИВНОСТИ И УСТОЙЧИВОСТИ АВТОМОБИЛЯ, ОБОРУДОВАННОГО АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ, СПОСОБ ОЦЕНКИ РАБОТОСПОСОБНОСТИ АНТИБЛОКИРОВОЧНОЙ СИСТЕМЫ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБОВ | 2008 |
|
RU2365516C1 |
| СПОСОБЫ ДИАГНОСТИРОВАНИЯ ТОРМОЗНОЙ СИСТЕМЫ АВТОМОБИЛЯ, ОБОРУДОВАННОГО АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ (ВАРИАНТЫ), СПОСОБ ДИАГНОСТИРОВАНИЯ ТОРМОЗНОЙ СИСТЕМЫ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБОВ | 2005 |
|
RU2297932C1 |
| СПОСОБ И УСТРОЙСТВО ПАРИРОВАНИЯ ЮЗОВАНИЯ КОЛЕСНЫХ ПАР РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2292277C2 |
| СПОСОБ УПРАВЛЕНИЯ АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2103191C1 |
| ИЗБИРАТЕЛЬНАЯ АНТИБЛОКИРОВОЧНАЯ ТОРМОЗНАЯ СИСТЕМА | 2006 |
|
RU2400383C2 |
Предложен способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства в процессе торможения или тягового режима, в соответствии с которым обрабатывают электрические сигналы, характеризующие динамику колес, в том числе угловые скорости вращения колес. Вычисляют параметры, характеризующие сцепление колес с опорной поверхностью. Находят экстремум функции текущих коэффициентов сцепления, в соответствии с которым уменьшают/увеличивают давление в тормозном приводе колес раздельно для каждого колеса или группы колес посредством электронного блока управления антиблокировочной системы и/или противобуксовочной системы транспортного средства. В режиме экстренного торможения транспортного средства обрабатывают электрические сигналы, характеризующие его динамику, в том числе угловые скорости транспортного средства вокруг продольной и поперечной осей, дополнительно обрабатывают электрические сигналы, характеризующие тангенциальное и радиальное ускорения колес, а экстремум функции текущих коэффициентов сцепления, характеризующих динамику колес, задают из условия одновременного исключения их проскальзывания по состоянию их углового рассогласования и отрыва от опорной поверхности по состоянию угла наклона поперечной оси транспортного средства с заданным запасом по углу отрыва и сбрасывают тягу двигателя транспортного средства до прихода упомянутых систем контроля движения в исходное положение. Предложено также устройство управления антиблокировочной системой. Достигается обеспечение динамической устойчивости, предотвращение опрокидывания и повышение безопасности режима экстренного торможения. 2 н. и 8 з.п. ф-лы, 7 ил.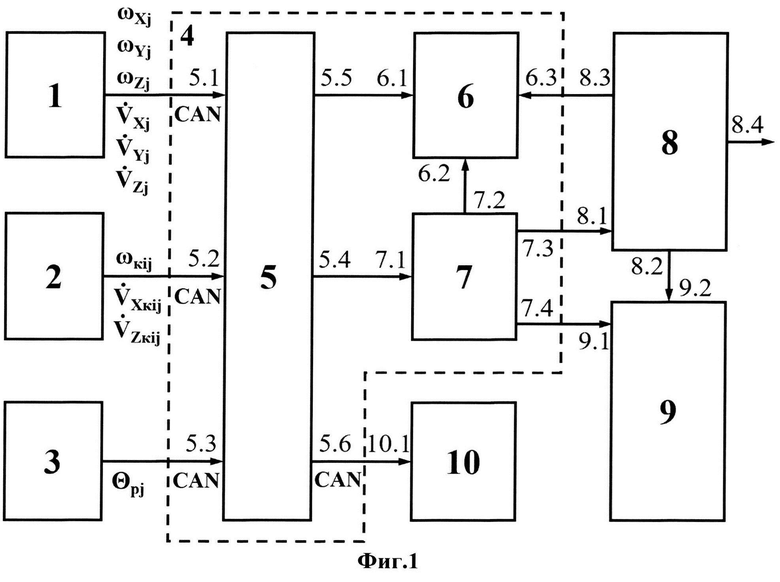
1. Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства в процессе торможения или тягового режима, в соответствии с которым обрабатывают электрические сигналы, характеризующие динамику колес, в том числе, угловые скорости вращения колес, вычисляют параметры, характеризующие сцепление колес с опорной поверхностью, находят экстремум функции текущих коэффициентов сцепления, в соответствии с которым уменьшают/увеличивают давление в тормозном приводе колес раздельно для каждого колеса или группы колес посредством электронного блока управления антиблокировочной системы и/или противобуксовочной системы транспортного средства, отличающийся тем, что в режиме экстренного торможения транспортного средства обрабатывают электрические сигналы, характеризующие его динамику, в том числе, угловые скорости транспортного средства вокруг продольной и поперечной осей, дополнительно обрабатывают электрические сигналы, характеризующие тангенциальное и радиальное ускорения колес, а экстремум функции текущих коэффициентов сцепления, характеризующих динамику колес, задают из условия одновременного исключения их проскальзывания по состоянию их углового рассогласования и отрыва от опорной поверхности по состоянию угла наклона поперечной оси транспортного средства с заданным запасом по углу отрыва и сбрасывают тягу двигателя транспортного средства до прихода упомянутых систем контроля движения в исходное положение.
2. Способ по п. 1, отличающийся тем, что для получения электрических сигналов, характеризующих динамику транспортного средства, используют микромеханический бесплатформенный инерциальный блок.
3. Способ по п. 1, отличающийся тем, что в качестве электрических сигналов, характеризующих динамику транспортного средства, используют продольную скорость, полученную интегрированием сигнала о продольном ускорении, угол разворота продольной оси вокруг вертикальной оси и угол наклона поперечной оси транспортного средства относительно плоскости местного горизонта.
4. Способ по п. 1, отличающийся тем, что при задании экстремума сигнала, характеризующего динамику колес, по сигналам о скорости их вращения определяют линейную скорость колес автомобиля, коэффициенты скольжения каждого колеса и суммарный коэффициент сцепления транспортного средства с опорной поверхностью, вычисляют коэффициенты сцепления для каждого колеса, определяют экстремумы функции текущих коэффициентов сцепления каждого колеса и в соответствии с этими экстремумами формируют управляющие сигналы для изменения давления в тормозном приводе колес.
5. Способ по п. 1, отличающийся тем, что одновременно, для предотвращения опрокидывания транспортного средства, определяют текущее значение угла наклона поперечной оси транспортного средства относительно плоскости местного горизонта и сравнивают его с заданным углом отрыва колес от опорной поверхности, причем, в случае достижения текущего значения угла наклона величины заданного угла отрыва, производят сброс тяги двигателя.
6. Способ по п. 1, отличающийся тем, что одновременно с сигналами о скорости вращения колес определяют сигналы тангенциального и радиального ускорения колес и с их учетом определяют коэффициенты сцепления для каждого колеса.
7. Устройство управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства, содержащее датчики угловой скорости колес, подключенные к электронному блоку управления, модулятор давления
тормозного привода каждого колеса и блок управления двигателем, отличающееся тем, что в устройство введены микромеханический бесплатформенный инерциальный блок, датчик угла поворота рулевого колеса и блок дифференциальных клапанов на ведущей и передней осях, электронный блок управления содержит микропроцессор, узел контроля и блок ключей, причем микромеханический бесплатформенный инерциальный блок подключен к первому входу микропроцессора, ко второму входу которого подключены датчики угловой скорости колес, к его третьему входу подключен датчик угла поворота рулевого колеса, к первому выходу - узел контроля, ко второму выходу - блок ключей, а к третьему - блок управления двигателем, первый выход блока ключей подключен к модулятору давления тормозного привода каждого колеса, второй выход - ко второму входу узла контроля, третий выход - к блоку дифференциальных клапанов на ведущей и передней осях, второй вход которого подключен к выходу модулятора давления тормозного привода каждого колеса, второй выход модулятора давления тормозного привода каждого колеса подключен к третьему входу узла контроля электронного блока управления, а третий - соединен с тормозными камерами каждого колеса.
8. Устройство по п. 7, отличающееся тем, что микромеханический бесплатформенный инерциальный блок выполнен на основе трех ортогонально расположенных микромеханических акселерометров и трех микромеханических гироскопов с цифровым выходом по интерфейсу CAN.
9. Устройство по п. 7, отличающееся тем, что на датчики угловой скорости колес жестко установлены двухосные микромеханические акселерометры с ортогонально расположенными осями чувствительности, направленными вдоль продольной оси и вертикальной оси транспортного средства, а их выходы подключены ко второму входу микропроцессора.
10. Устройство по п. 7, отличающееся тем, что входы и выходы микропроцессора выполнены с возможностью соединения по интерфейсу CAN.
| DE 10344835 B4, 03.11.2005 | |||
| DE 4134831 C2, 18.05.1995 | |||
| EP 3297862 A1, 28.03.2018. |

