, х-ч // fffS
Vч/ЛЛу, L .
Pi - , о©
ю
rsj
а

| название | год | авторы | номер документа |
|---|---|---|---|
| Многокомпонентные тензометрические весы | 1975 |
|
SU531036A2 |
| Многокомпонентные тензометрические весы | 1981 |
|
SU994924A2 |
| УСТРОЙСТВО ДЛЯ УГЛОВЫХ И ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 1994 |
|
RU2102714C1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ ВРАЩАТЕЛЬНЫХ ПРОИЗВОДНЫХ АЭРОДИНАМИЧЕСКИХ СИЛ И МОМЕНТОВ МОДЕЛИ В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 2012 |
|
RU2515127C1 |
| Аэродинамические тензометрические весы | 1983 |
|
SU1099108A1 |
| УСТРОЙСТВО ДЛЯ СКОРОСТНОГО СПУСКА С ГОР С АЭРОДИНАМИЧЕСКИМ УПРАВЛЕНИЕМ | 1999 |
|
RU2152885C1 |
| Однокомпонентные тензовесы для измерения шарнирного момента | 2023 |
|
RU2798685C1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ ВРАЩАТЕЛЬНЫХ ПРОИЗВОДНЫХ АЭРОДИНАМИЧЕСКИХ СИЛ И МОМЕНТОВ МОДЕЛИ В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 2012 |
|
RU2522794C1 |
| ЛЕГКИЙ САМОЛЕТ | 1991 |
|
RU2007333C1 |
| Устройство для определения характеристик раскрытия планирующего парашюта в аэродинамической трубе | 2023 |
|
RU2806409C1 |
Изобретение относится к приборостроению -и может быть использовано для определения аэродинамических сил и моментов при воздействии на модель потока газа или жидкости. Изобретение позволяет повысить точность измерения. Поток газа, воздействуя на модель 22, вызывает аэродинамическую силу R. Горизонтальная составляющая X силы R измеряется нижней стороной параллелограмма 12 с помощью тензо- резисторов J3. Боковая сила У через связь 24 деформирует державку 14 с тензорезисторами 15, а плоские пружины 17 обеспечивают свободное перемещение моделие 2 ил.
аоиз. 1
Изобретение относится к приборостроению, а именно к устройствам для определения сил и моментов, дейст- вующих на модель, помещенную в поток газа или жидкости.
Цель изобретения - повышение точности измерения.
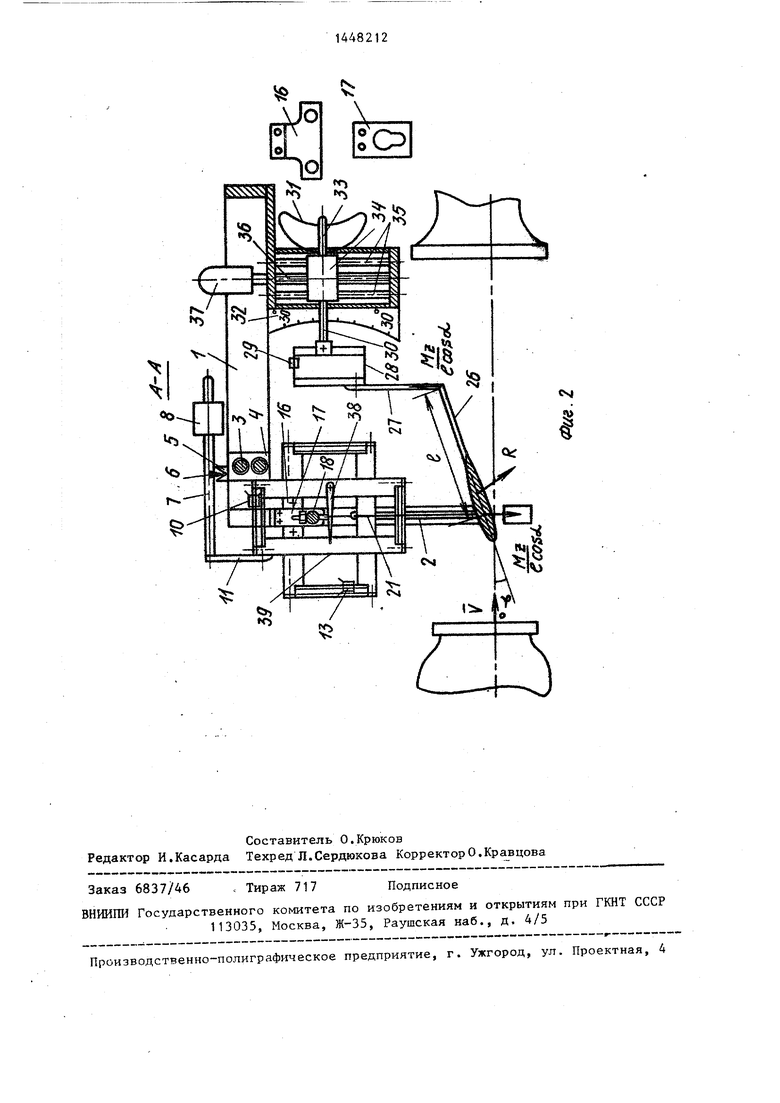
На фиг. 1 представлены весы| на фиг. 2 - то же, поперечньй разрез,
Весы содержат раму 1 со стойками 2, Направляйщие 3 для двух ползунов 4, к каждому из которых прикреплена пята 5, взаимодействующая с призмой 6- рычага 7- с установленным на нем контргрузом 8э и вертикальный параллелограмм 9 с тензорезистором 10, Последний служит для измерения подъемной силы.
Рычаг 7 с помощью упругой пласти- Ны 11 соединен с параллелограммом 9, к подвижной части которого изнутри жестко прикреплен горизонтальный параллелограмм 12 с тензорезистором 13 Последний обеспечивает измерение си- лы лобового сопротивления. С нижней стороной горизонтального параллелограмма 12 связана державка 14 с тен- зорезисторами 15, служащими для измерения боковой силы, К верхней стороне каждого параллелограмма 12 со стороны модели прикреплены кронштейны 16 с плоскими пружинами 17 с фигурными oтвepcтия iи в которые установлены снабженные на концах про точками стяжки 18,
Стяжки имеют отверстия, в которые у тановл-ены резьбовые регуляторы 19 с контргайками 20, Резьбовые регуля- торы 19 снабжены гибкими звеньями 21, вторые концы которых соединены с испытываемой моделью 22, В горизонтальном направлении модель 22 посредством грузов 23 и гибких связей 24 соединена с державками 14, Гибкие св аи 24 ошивают блоки 25, установленные на стойках 2, Посредством рычага 26 модель 22 шарнирно соединена с тягой 27, которая прикреплена к параллелограмму 28 с тензорезистором ;295 служащим для измерения момента тангажа,
Параллелограмм 28 связан с роликом 30, прижатым пружиной 31 к шкале 32 углов атаки, и с тягами 33, входящими в подвижную гайку 34,
Перпендикулярно тягам 33 в подвижную гайку 34 введены .направляющие
35 и ходовой BHgT 36, взаимодействующий с приводом 37, к одному из звеньев параллелограмма 9 шарнирно прикреплена стрелка 38, а на втором его звене нанесен индекс 39,
Весы работают следующим образом,
Весы устанавливаются в исходное состояние, для чего перемещением контргруза 8 по рычагу 7 добиваются, чтобы стрелка 38 установилась против индекса 39. Гибкую связь 24 прикрепляют па модели 22, Вторые концы связи 24 проводят через отверстия в державках 14 и, перебросив через блоки 25, соединяют с грузами 23. Гибки звенья 21 одними кoнцa яl прикрепляют к модели 22, а вторые конщл связываю с резьбовыьш регуляторами 19. Модель устанавливают горизонтально и закрепляют контргайками 20. Затем гибкие связи 24 закрепляют в державках 14. Устанавливают параллелограмм 28 по шкале 32 углов атаки на нуль. Рычаг 26 соединяют с моделью 22 и тягой 27, Включается аэродинамическая труба. Взаимодействие потока с моделью 22 приводит к возникновению силы R, горизонтальная составляющая которой (сила лобового сопротивления X) передается через держаёки 14 на нижние стороны горизонтальных параллелограммов 12 и дефор1«1рует их имеете с тензорезисторами 13, При возникновении боковой составляющей гибкая связь 24 деформирует державку 14 и тензорезистор 15. При этом плоские пружины 17 обеспечивают боковое перемещение модели 22;
Через гибкие звенья 21, резьбовые регуляторы 19, стяжки 18, плоские пружины 17 и кронштейны 16 подъемная сила У передается на верхние стороны горизонтальных параллелограммов 12 и, не оказывая воздействия на державки 14, деформирует упругие пластины вертикальных параллелограммов 9с тензорeзиcтopa вI 10, Этим исключается взаимное влияние различных составлякицих силы R, Так как сила У действует вдоль гибкого звена 21, модель не изменяет своего положения в пространстве.
При несовпадении точки приложения силы R с осью вращения модели (гибкая связь 24) возникает сила, вызывающая момент тангажа. Эта сила через рычаг 26 и тягу .27 передается на параллелограмм 28, деформирует
его и укрепленные на нем тензорезис- торы 29.
ВЕЛСОДНЫВ сигналы тензорезисторов через усилитель подаются на вторичные показывающие и записыватцие приборы. Сила X определяется как сумма сигналов от тензорезисторов 13, а момент рысканья как их разность. Сила У определяется как сумма сигна- лов от тензорезисторов 10 и 29, а момент крена - как разность показаний тензорезисторов 10 и 29, умноженная на размах модели. Боковая сила и момент тангажа определяются по сиг налам тензорезисторов 15 и 29 соответственно.
Изменение угла атаки моделью производят электроприводом 37, который, вращая винт 36, перемещает по направляющим 35 гайку 34. Ролик 30, прижатый пружиной 31 к шкале 32, перекатывается по последней и паремещает
параллелограмм 28 и тяги 33 в горизонтальной плоскости. Это приводит к угловому перемещению державки 27 и модели 22, разворачивая ее на заданный угол атаки.
Формула изобретения
Многокомпонентшле тензометричес- кие весы по авт. св. 994924, о т- личающиеся тем, что, с целью повышения точности измерения, в них вЪедены тяга с отверстиями, резьбовые регуляторы, плоские пружины с отверстиями и кронштейны, закрепленные на верхних частях горизонтальных параллелограммов и связанные между собой тягой через плоские пружины, которые закреплены иа кронштейне, в отверстиях тяг установлены резьбовые регуляторы, соединенные при помощи гибких связей с испытуемой моделью.
О
Составитель О.Крюков Редактор И.Касарда Техред Л.Сердюкова Корректор О.Кравцова
Заказ 6837/46
Тираж 717
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
.,,-; - - - - -
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Подписное
| Многокомпонентные тензометрические весы | 1981 |
|
SU994924A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
