Изобретение относится к спорту и касается скоростного спуска с гор с помощью монополоза.
Известно устройство для скоростного спуска с гор с аэродинамическим управлением, содержащее монополоз, плоскости для создания крена и стабилизатор в вертикальной и горизонтальной плоскостях (RU 2122503C1, МПК B 62 B 15/00, опублик. 27.11.96).
Технический результат от реализации описываемого изобретения состоит в повышении эксплуатационных характеристик устройства для скоростного спуска с гор с аэродинамическим управлением.
Для достижения этого в устройстве, содержащем монополоз, плоскости для создания крена и стабилизатор в вертикальной и горизонтальной плоскостях, плоскости для создания крена расположены вертикально, а устройство снабжено горизонтальными плоскостями. Устройство имеет один орган управления для одновременного изменения углов атаки основных плоскостей и стабилизатора в горизонтальных и вертикальных плоскостях, а также оно снабжено крепежом и системой соединений для безинструментальной сборки/разборки.
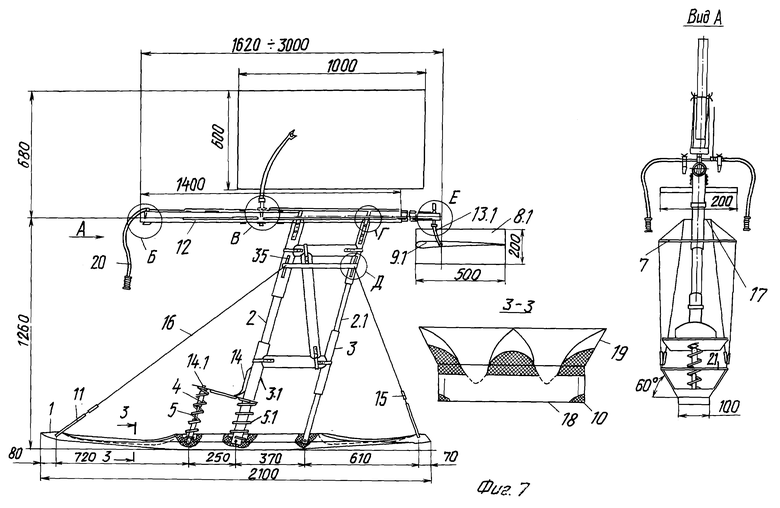
Изобретение поясняется чертежами, где фиг. 1 представляет боковой вид и вид спереди по стрелке "А", а также поперечное сечение "3-3" с облегчающими выборками; фиг. 2 - узел "Б" в двух проекциях; фиг. 3 - узел "В" в двух проекциях; фиг. 4 - узел "Д" и "Г" в двух проекциях; фиг. 5 - узел "Е" в двух проекциях; фиг. 6 - конструкции плоскостей; фиг. 7 - общий вид упрощенного устройства.
Для достижения этого технического результата в конструкции предлагаемого устройства поставлены и решены следующие задачи:
1. Создание крена на вираже до 60o, при движение в контакте с поверхностью спуска, благодаря вертикальному расположению аэродинамических плоскостей крена 8.
Сила, создающая и удерживающая необходимый крен на вираже, имеет аэродинамическое происхождение и возникает при изменении угла атаки вертикальных плоскостей 8 к набегающему воздушному потоку, при достижении достаточной скорости спуска. При разгоне и торможении остойчивость и крен обеспечиваются за счет коротких лыж, закрепленных на ногах пилота.
2. Возможность изменять величину реакции опоры, при движении в контакте с поверхностью спуска, в зависимости от ее состояния (снег, уплотненный снег, лед), путем изменения величины и знака угла атаки горизонтальных аэродинамических плоскостей 9 и 9.1.
3. Возможность коррекции баллистической траектории в плоскостях тангажа и рысканья, при отрывах от поверхности спуска (трамплинные прыжки), используя всю площадь вертикальных и горизонтальной основных плоскостей 8 и 9 и плоскостей стабилизатора 8.1 и 9.1 путем изменения их угла атаки с противоположными знаками, т.е. применена одна из наиболее распространенных в авиации схема планера.
Нагрузка на рукояти штурвала 20 будет незначительной, так как точка пересечения вертикальных и горизонтальных осей вращения основных плоскостей и плостей стабилизатора располагается несколько впереди, но вблизи центра приложения суммарных аэродинамических сил.
4. Спуск может быть осуществлен по неподготовленным, крутым (до 45o и более) тросам, благодаря предусмотренной амортизации и возможностям, изложенным в п.3.
5. Полная разбираемость (собираемость) конструкции и компактность ее упаковки обеспечивается применением труб различного диаметра (вставляются одна в другую) и использования телескопических конструкций.
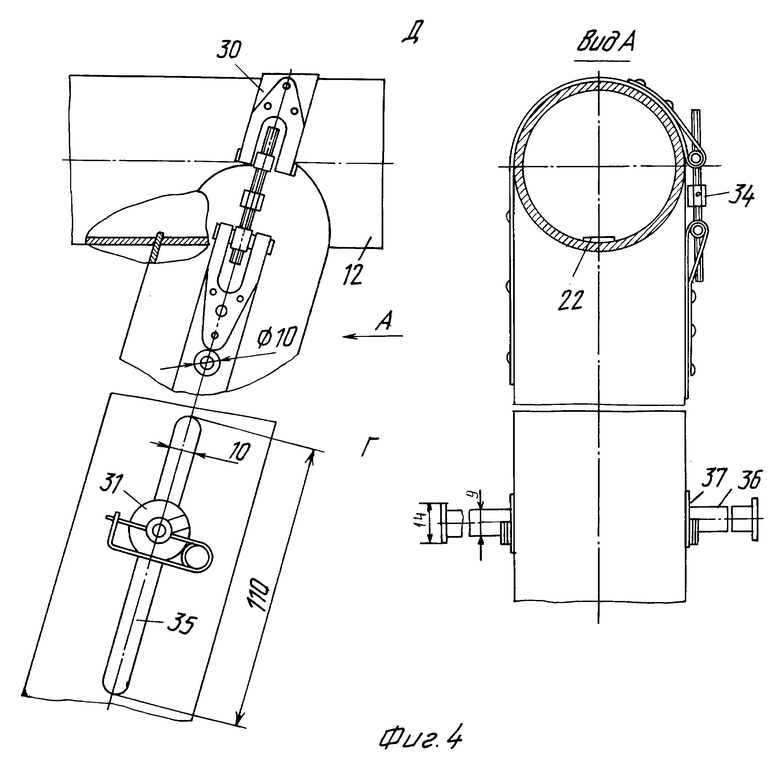
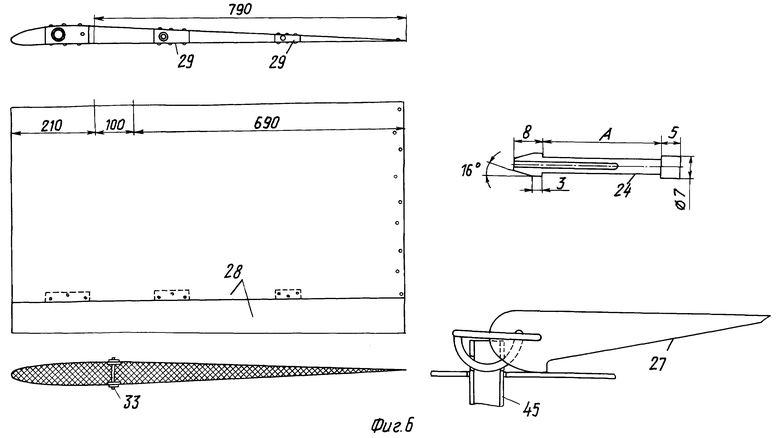
Безинструментальная (ручная) сборка (разборка) устройства обусловлена применением барашковых гаек и болтов, разрезных пружинящих шпилек с коническим наконечником 44, для сшивания элементов горизонтальных плоскостей 28, цанговых резьбовых зажимов 25, для соединения трубчатых тяг управления 26, 22 и 22.1, кулачковых эксцентрических замков 27 для стягивания горизонтальных плоскостей по отверстиям пластин 29, хомутиковых креплений 30 для сборки фермы 3 и соединения ее с телескопическим фезюляжем 12, использованием разрезных пружинящих шайб 31 и булавок 32.
Описание конструкции устройства дано совместно с процессом его сборки.
Устройство состоит из двух частей - статической, относительно поверхности спуска, и динамической. К статической относится монолыжа 1, состоящая из нижней части 18 (древесина или легкий пластик) с профильно искривленной поверхностью (сегмент с R = (10000-20000) мм или лекальная поверхность аналогичная коньку фигуристов), для повышения маневренности на виражах, окантованная снизу полосками высоколегированной стали 10 и армированная болтами М (5-6) мм. На эти болты надевается верхняя часть монолыжи 19 и стягивается барашковыми гайками. Обе части имеют облегчающие выемки сеч. 3-3 и цилиндрические выборки. В переднюю вставляется пружина 5 и разведенный амортизатор 4, в среднюю - передняя мачта 2, продетая низом сквозь пружину 5.1, в заднюю выборку вставляется вторая мачта 2.1. Угол отклонения мачт составляет 70-80 градусов. Обе мачты и амортизатор фиксируются снизу через имеющиеся у них и в монолыже отверстия трубчатыми шплинтами, развальцованными с одной стороны и фиксирующиеся от выпадения булавками 32 с другой. В носовое и хвостовое отверстия в монолыже вставляются вантовые оттяжки 11, представляющие собой перевернутую трапецию, одна сторона с основанием при остром угле на оси вращения, а другая разорвана для болтового соединения. Один из тупых углов при вершине 120o связан жестко, другой связан с боковой стороной трапеции осью вращения одним концом, другой конец подвижной стороны - под болтовое соединение с основанием. Таким образом подвижная сторона трапеции продевается через отверстие в монолыже, представляя собой прямую с вершиной трапеции, затем подвижная сторона сводится с основанием трапеции 21 и соединяется барашковыми болтом и гайкой. Основание трапеции 21 имеет на концах выборки в которые заводятся хомуты вант 16 с вделанными в них тендерами натяжения 15. Аналогично собирается задняя оттяжка.
Сборка динамической части начинается с надевания на переднюю мачту патрубка 3.1, к которому приварена спинка сидения 14 и опорная часть на мачтовую пружину. Сидение 14.1 соединено со спинкой осью вращения. Верхние части пружин крепятся к опорной части патрубка и сидению барашковыми болтами, после чего на сидение накладывается лист паралона и надевается брезентовый чехол. В проушины сидения и спинки заводятся ремни безопасности. На заднюю мачту надевается другой нижний патрубок фермы 3, и начинается монтаж фермы. Он производится путем вставления шипов 22 в соответствующие пазы и стягивания хомутов 30 двухсторонними болтами 34 (с правосторонней и левосторонней резьбами). В качестве инструмента используется прямая часть булавки, вставляемая в сквозное отверстие в болте. Телескопический фюзеляж 12 так же хомутами крепится к торцам верхних патрубков фермы 3, имеющих с двух сторон продольные диаметрально расположенные прорези 35. В эти прорези и отверстия в обеих мачтах вставляются штыри 36 и фиксируются от смещения с двух сторон булавками 32 через фторопластовые шайбы 37. На концы штырей 36 заводятся верхние хомуты вант и фиксируются разрезными шайбами 31. Две передние мачты между тендером и верхним хомутом имеют подвижные сухари с барашковыми болтами, позволяющими фиксировать их на любом участке ванты. Они необходимы для удержания распорки 7 которая должна находиться немного выше плеч сзади пилота. Далее производится натяжка вант тендерами с периодической проверкой свободного хода фермы 3 по мачтам. Каждый из четырех вертикальных патрубков фермы 3 с двух концов внутри снабжен цилиндрическими фторопластовыми втулками уплотнения, скользящими по густой смазке. После чего вытягиваются и фиксируются через диаметральные отверстия сквозные отверстия, шпильками 44, телескопические колена фюзеляжа. Последнее колено фюзеляжа имеет свободный ход. Это связано с тем, что тяги управления на стабилизатор проходят по диагоналям прямоугольника (см. кинематическую схему управления 38). Колена фюзеляжа снабжены также уплотнительными фторопластовыми втулками. Длина фюзеляжа варьируется. Монтаж схемы управления сводится к монтажу узлов "Б", "В" и " Е" фиг.1 и соединению их трубчатыми тягами управления.
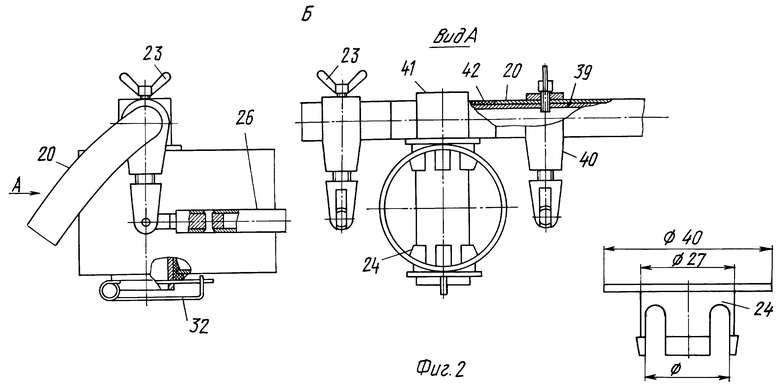
Узел "Б". Во фторопластовые подшипники скольжения 24 вставляется патрубок 41, который может вращаться вокруг вертикальной оси и контриться снизу булавкой. Сверху, сквозь впрессованные в него латунные подшипники скольжения продевается, горизонтальный патрубок 39, который может вращаться вокруг горизонтальной оси и в горизонтальной плоскости. С двух сторон на патрубок 39 надеваются калибровочные втулки 42 и два полуштурвала 20 с предварительно надетыми на них рычагами управления 40. После установки барашковых болтов 23, ввернутых в тело патрубка 39, конструкция жестко собрана. Таким образом имеем закрепленные две рукояти штурвала 20, которые могут поворачиваться вокруг вертикальной оси, а также вокруг горизонтальной оси благодаря патрубкам 41 и 39, при этом рычаги управления 40 жестко связанны с рукоятями 20. Сам рычаг управления состоит из двух частей - верхняя жестко связана с рукоятью 20 и нижней, свободно вращающейся вокруг продольной оси рычага и имеющей осевое соединение с трубчатой тягой 26, оканчивающейся цанговым зажимом 25.
Сборка узла "В" начинается с вставления трубок тяг управления рычагов 40 узла "Б" в цанговые окончания тяг управления рычагов 40 узла "В".
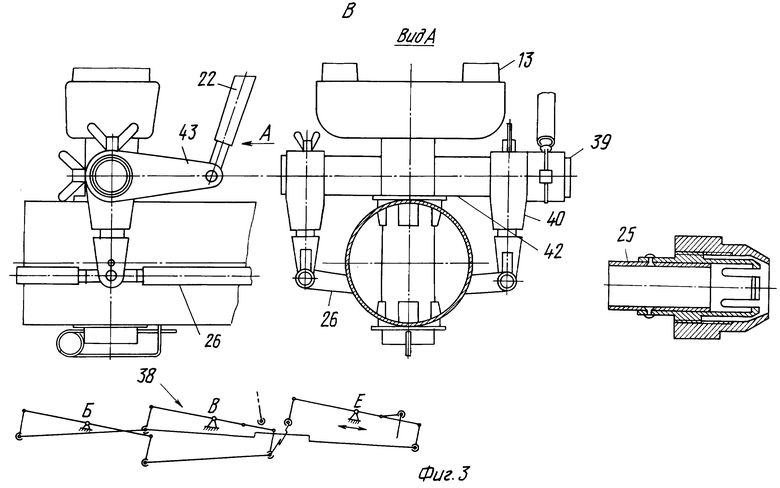
Узел "В". В шейку вилки 13 (вилка переднего колеса спортивного велосипеда) сквозь латунные подшипники скольжения вставляется патрубок 39, с обеих сторон на него надеваются калибровочные втулки 42 и рычаги 40 с тягами управления 26. Шейка вилки 13 продевается в отверстия в фюзеляже сквозь фторопластовые подшипники скольжения и контрится снизу булавкой. Производится затяжка барашковых болтов рычагов управления 40 и установка рычага управления углом атаки основных плоскостей 43, соединенного осью вращения с тягой 22. Рычаг 43 также крепится барашковым болтом.
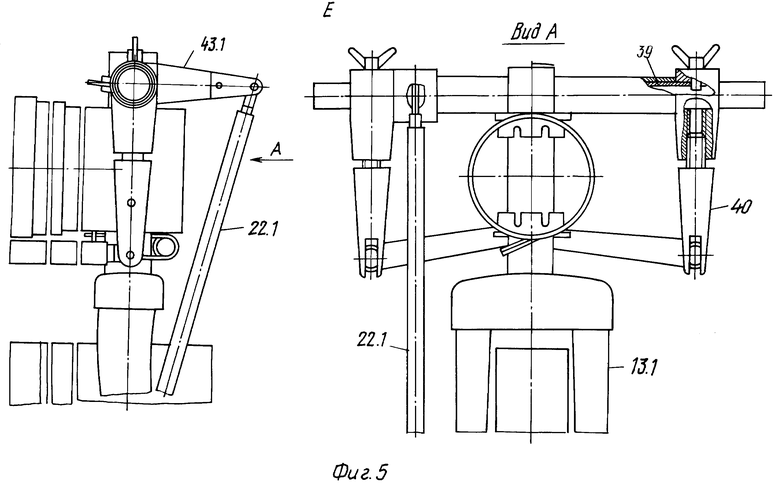
Узел "Е". Монтируется узел продеванием шейки вилки 13.1 (аналог вилки переднего колеса детского велосипеда) снизу сквозь подшипники скольжения. Сверху продевается патрубок 39, на него с обеих сторон надеваются калибровочные втулки, рычаг управления углом атаки горизонтальных плоскостей стабилизатора 43.1 с одной стороны и рычаги управления 40 с обеих. Все рычаги затягиваются барашковыми болтами. Трубчатые тяги управления, предварительно заведенные в цанговые зажимы тяг, идущих от узла "В". При использовании длинного фюзеляжа предусмотрены кронштейны для поддержки тяг управления.
Монтаж аэродинамических плоскостей управления начинается с монтажа плоскости крена 8 и плоскостей стабилизатора 9.1 и 8.1. Аэродинамические плоскости представляют собой каплеобразные профили из тонкого дюраля или гибкого пластика, заполненные, для жесткости, пенопластом. Основная горизонтальная плоскость 9 может иметь профиль крыла. Для большего усиления плоскостей может применяться дополнительное армирование. В плоскость крена 8 в точке, близкой к суммарному центру приложения аэродинамических сил, но несколько впереди, армирована ось переднего колеса спортивного велосипеда и сзади по ходу - несколько консольных штырьков с проточками на концах для завода разрезных шайб. На один из этих штырьков крепится тяга 22 и 22.1, длины которых регулируются цанговыми зажимами. Эти тяги соединяют рычаги управления углом атаки 43 и 43.1 с консольными штырьками плоскостей 8 и 8.1. Если ряд штырьков в плоскости крена расположен сзади по ходу за осью 33, то на плоскости стабилизатора 8.1 он спереди оси. Расстояние от оси подвески 33 до штырька определяет передаточное число от штурвала до плоскостей, при создании углов атаки горизонтальных плоскостей 9 и 9.1, а их расположение - знаки углов атаки, которые в нашем случае противоположны как для горизонтальных плоскостей, так и для вертикальных. Плоскость крена 8 и стабилизатор в сборе 8.1 и 9.1 устанавливаются и крепятся к вилкам 13 и 13.1 барашковыми гайками по аналогии с установкой и креплением переднего колеса спортивного велосипеда.
После установки плоскости крена и стабилизатора "АЭРОСАМ" может эксплуатироваться фиг. 7, при этом он не сможет изменять реакцию опоры в контакте с поверхностью спуска и корректировать баллистическую траекторию при отрывах от поверхности спуска в плоскости тангажа. Выполнение остальных, оговоренных ранее, задач остается возможным.
Монтаж горизонтальных плоскостей 9 производится путем вставления каждой последующей полуметровой секции 28 в углубление предыдущей, по аналогии с рыбацким удилищем, и фиксации их шпильками 24. После вставления в отверстия гнутых пластин 29 ланжеронных трубок 45 производится общая стяжка горизонтальных плоскостей эксцентричными кулачковыми замками 27. После выставления (основных и стабилизатора) в нулевые углы атаки производится затяжка цанговых зажимов на всех тягах управления. На этом сборка закончена полностью.
Описываемое устройство эксплуатируется при скоростном спуске с гор следующим образом.
Все изменения углов атаки всех плоскостей производятся от манипуляций штурвалом 20. Вращательное, вокруг вертикальной оси, движение штурвалом передается через тяги управления, идущие по длинным сторонам прямоугольника от узла штурвала "Б" к узлу крепления вилки 13 основных плоскостей "В". Так поворот штурвала по часовой стрелке вызовет поворот основных плоскостей по часовой стрелке. Плоскость крена получит угол атаки, создающий аэродинамическую силу, вызывающую крен вправо. Через тяги, идущие от узла "В" к узлу стабилизатора "Е" по диагоналям прямоугольника, вращающий момент будет передан на стабилизатор с обратным знаком, плоскости стабилизатора повернутся против часовой стрелки и создадут аэродинамическую силу, действующую в противоположном от крена направлении. Таким образом на устройство будут действовать аэродинамические силы крена и от стабилизатора разворачивающая устройство вправо вокруг вертикальной оси, которые будут уравновешиваться центробежной силой.
При отрывах устройства от поверхности спуска (трамплинные прыжки) описанная манипуляция вызовет искривление баллистической траектории вправо. Поворот штурвала против часовой стрелки даст противоположный по знаку результат.
Если штурвал выбран (придвинут пилотом к себе) на какой-то угол, то это угловое перемещение совершат рычаги управления 40 узла "Б" и через тяги 26 рычаг 43 и тягу 22, консольные штырьки передадут вращательное движение на горизонтальные плоскости 9, которые расположатся под углом атаки, создающим подъемную силу. Одновременно через перекрещивающиеся тяги это движение будет передано на стабилизатор, горизонтальные плоскости которого должны встать с углом атаки, противоположным по знаку (приземляющим стабилизатор). Данная манипуляция приведет к удлинению баллистической траектории. Если штурвал отдан (отодвинут пилотом от себя) знаки поменяются, что приведет к укорочению баллистической траектории, при отрыве от поверхности спуска или к увеличению реакции опоры, при движении в контакте с поверхностью спуска.
Все описываемые манипуляции могут проводиться одновременно в различных сочетаниях, что совместно с профильной кривизной монолыжи повысит маневренность устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СКОРОСТНОГО СПУСКА С ГОР С АЭРОДИНАМИЧЕСКИМ УПРАВЛЕНИЕМ "АЭРОСАТ" | 1996 |
|
RU2122503C1 |
| СКОРОСТНОЕ СУДНО | 2010 |
|
RU2436707C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| КИНЕТИЧЕСКАЯ БОЕГОЛОВКА С АЭРОДИНАМИЧЕСКИМ НАВЕДЕНИЕМ | 2022 |
|
RU2825027C2 |
| КОНВЕРТОПЛАН С РЕАКТИВНЫМ ПРИВОДОМ РОТОРОВ, УПРАВЛЯЕМЫЙ РОТОРАМИ ПОСРЕДСТВОМ АВТОМАТОВ ПЕРЕКОСА ЧЕРЕЗ РЫЧАГИ УПРАВЛЕНИЯ, НЕ ТРЕБУЮЩИЙ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ УПРАВЛЕНИЯ | 2013 |
|
RU2570241C2 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ И ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2667410C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2646691C2 |
| ТРАНСПОРТНЫЙ САМОЛЕТ "САМОЛЕТ В.С.ГРИГОРЧУКА" | 1995 |
|
RU2086478C1 |
Изобретение относится к спорту и касается скоростного спуска с гор с помощью монополоза. Устройство для скоростного спуска с гор с аэродинамическим управлением имеет монополоз, плоскости для создания крена и стабилизатор в вертикальной и горизонтальной плоскостях. Плоскости для создания крена расположены вертикально. Устройство снабжено горизонтальными плоскостями, которые вместе с вертикальными плоскостями для создания крена предназначены для изменения реакции опоры при движении в контакте с поверхностью спуска и корректировки баллистической кривой в плоскостях тангажа и рыскания, при отрывах от поверхности спуска. При этом устройство имеет один орган управления для одновременного изменения углов атаки основных плоскостей и стабилизатора в горизонтальных и вертикальных плоскостях. Устройство также снабжено крепежом и системой соединений для безинструментальной сборки/разборки. Технический результат от реализации заявленного изобретения заключается в повышении эксплуатационных характеристик устройства для скоростного спуска с гор с аэродинамическим управлением. 7 ил.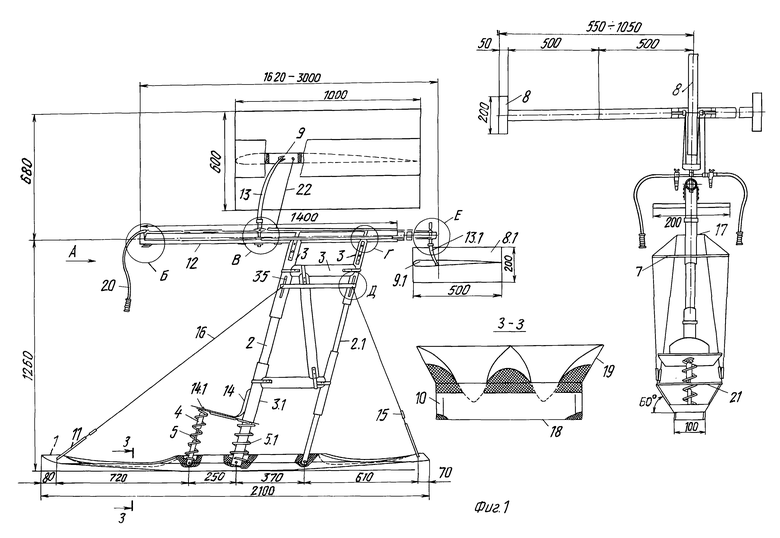
Устройство для скоростного спуска с гор с аэродинамическим управлением, содержащее монополоз, плоскости для создания крена и стабилизатор в вертикальной и горизонтальной плоскостях, отличающееся тем, что плоскости для создания крена расположены вертикально, а устройство снабжено горизонтальными плоскостями, которые вместе с вертикальными плоскостями для создания крена предназначены для изменения реакции опоры при движении в контакте с поверхностью спуска и корректировки баллистической кривой в плоскостях тангажа и рыскания, при отрывах от поверхности спуска, при этом устройство имеет один орган управления для одновременного изменения углов атаки основных плоскостей и стабилизатора в горизонтальных и вертикальных плоскостях, а также оно снабжено крепежом и системой соединений для безинструментальной сборки/разборки.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ СКОРОСТНОГО СПУСКА С ГОР С АЭРОДИНАМИЧЕСКИМ УПРАВЛЕНИЕМ "АЭРОСАТ" | 1996 |
|
RU2122503C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 3542389 A, 24.11.1970 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| БУЕР | 1991 |
|
RU2007322C1 |
