-о
Ф1/г
1144
Изобретение относится к измерительной технике и может быть использовано для автоматизации аэробаллистических экспериментов в системах исследования движущихся объектов.
Целью изобретения является повышение быстродействия и помехоустойчивости, расширение области применения
триггера 3 и вторым счетным входом 24 счетчика 5, первый счетный вход 23 счетчика 5 подключен к шине последовательного пересчета адресов, выход 16 пер еполнения счетчика 5 подключен .к входу 25 остановки ждущего гене- ато- ра 6, разрядные выходы счетчика 5 под ключены к соответствующим адресным
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНАЯ СИСТЕМА ДЛЯ РЕГИСТРАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 1991 |
|
RU2037190C1 |
| Устройство для измерения мощности | 1990 |
|
SU1751685A1 |
| Преобразователь интервалов времени в цифровой код | 1984 |
|
SU1255984A2 |
| Измеритель временных интервалов | 1981 |
|
SU1001000A1 |
| Измеритель временных интервалов | 1983 |
|
SU1155990A1 |
| Устройство для ввода информации | 1983 |
|
SU1113794A1 |
| Многоканальная система для анализа формы и регистрации аналоговых процессов | 1983 |
|
SU1149242A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК ЧЕТЫРЕХПОЛЮСНИКА | 1992 |
|
RU2065667C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА РАДИОСТАНЦИЙ | 1994 |
|
RU2099868C1 |
| Устройство для управления многоканальным электроприводом тренажера | 1984 |
|
SU1180846A1 |
Изобретение относится к измерительной технике и позволяет автоматизировать обработку результатов аэробаллистических экспериментов в системах исследования движущихся объектов. При пересечении моделью плоскости первого датчика IQ к первому формирователю 2о вырабатывается импульс, который устанавливает в единичное состояние триггер 3, запускает ждущий генератор 6, тактовые импульсы которого поступают на вход цифрового измерителя 7, Одновременно значение кода цифрового измерителя 7 заносится в регистр 8 и запоминается по начальному- адресу в запоминающем блоке 9. Через заданное время на выходе элемента 4 вырабатывается импульс, увеличивающий содержимое счетчика 5 на единицу и устанавливаюошй адрес следующего датчика, а также устанавливающий триггер 3 в нулевое состояние и запрещающий запись информации в запоминающий блок 9. При пересечении моделью плоскости (N+l)-ro датчика в запоминающем блоке 9 запоминается после- довательность кодов, характеризующих время пролета участков 1 .. ,1.. Результаты измерения можно вьшодить на блок индикации в автономном режиме, без участия ЭВМ 12. Для автоматического ввода в ЭВМ 12 на шине режима 15 устанавливается соответствующий код, который поступает на блок сопря - жения 11, далее производится ввод данных из блока 9 в ЭВМ 12. В ЭВМ производится обработка результатов измерения и определяются параметры движения моделей. 2 ил. if
за счет измерения скорости и ускорения|Q входам 30 запоминающего блока 9 и 31
блока 10 индикации, порты 35 и 36 обмена соединены между собой и подключены к соответствующим разрядам информационного входа 34, соответствующие шины блока 11 сопряжения и ЭВМ 12 соединены между собой, вход 1 режима блока 11 сопряжения подключен к шине установки режима, выход ждуще го генератора 6 подключен к счетному входу 28 измерителя 7 времени, разрядные выходы которого подключены к соответствующим разрядам информацион ных входов 32 регистра 8, разрядные выходы которого подключены к информа ционным входам 33 запоминающего бло ка 9.
вдоль исследуемого участка траектории.
15
25
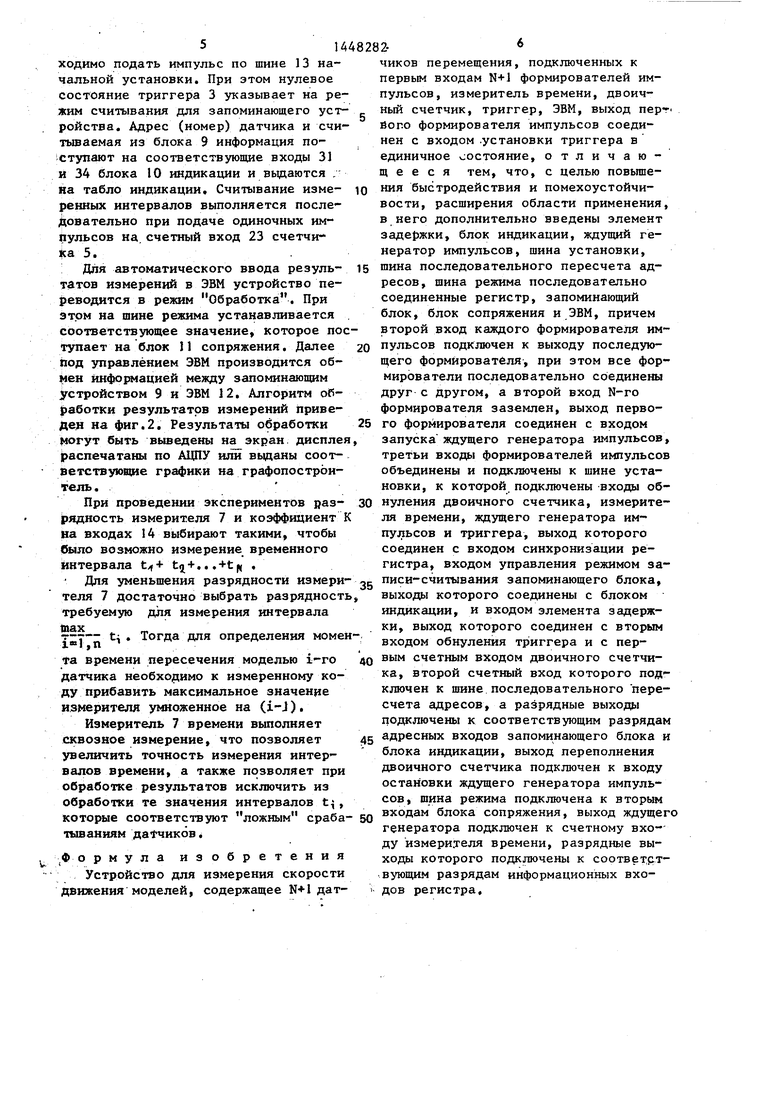
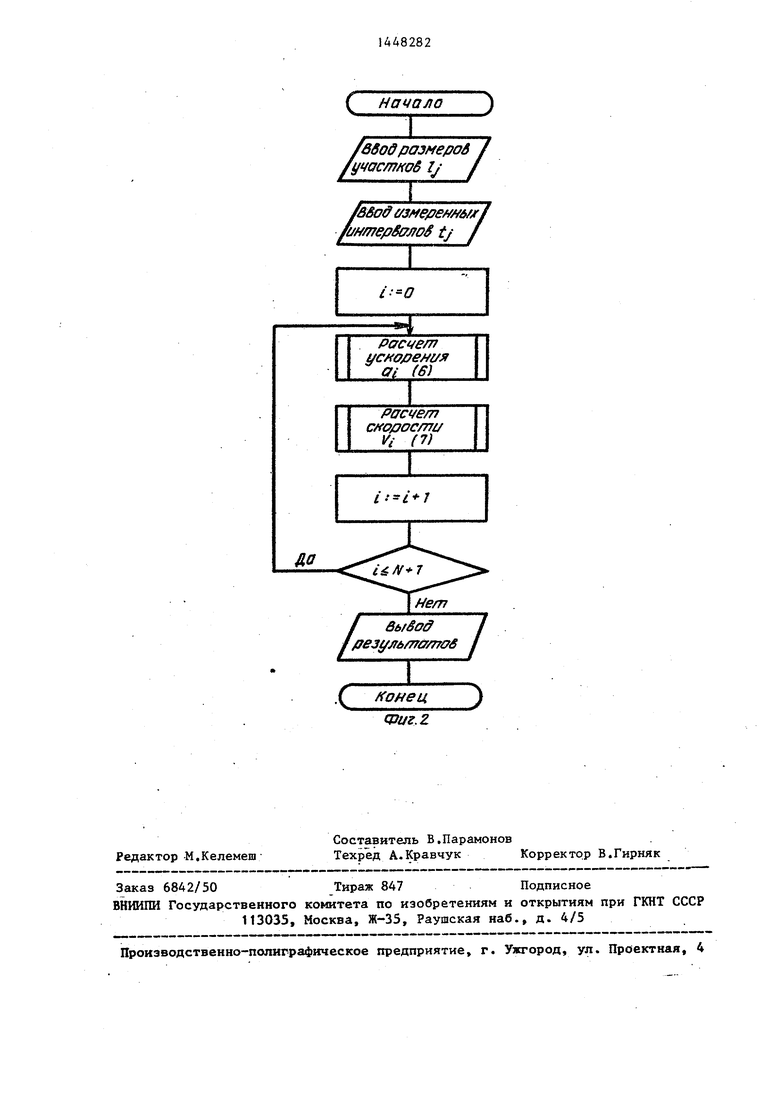
На фиг.1 приведена структурная схема предложенного устройства; на фиг.2 - алгоритм обработки результатов измерений.
Устройство содержит импульсные датчики перемещения, формирова- |тели 2о-2ц импульсов, триггер 3, эле- ;нент 4 задержки, двоичнь счетчик 5, 2о ждущий генератор 6 импульсов, цифро- |вой измеритель 7 времени, регистр 8, запоминающий блок 9, блок 0 индикации, блок 11 сопряжения, электронную вычислительную мащину J2,, Схема так- ;же содержит шину 13 начальной установки, входы 14 коэффициента преобразования, вход 15 режима, выход 16 переполнения, вход 17 установки в нуле- вое состояние, входы 8-21 обнуления, вход 22 установки в единичное состояние, счетные входы 23 и 24, вход 25 остановки, синхровход 26, вход 27 запуска, счетный вход 28, вход 2 управления записью-считьюанием, адресные входы 30 и 31, информационные входы 32-34, порты 35 и 36 обмена.
Выходы каждого датчика Ji перемещения подключены к первым входам соответствующих формирователей 2, , вторые входы которых подключены к в|.г- ходу последующего формирователя t так, что все формирователи 2 последовательно соединены друг с другом.
35
40
блока 10 индикации, порты 35 и 36 обмена соединены между собой и подключены к соответствующим разрядам информационного входа 34, соответствующие шины блока 11 сопряжения и ЭВМ 12 соединены между собой, вход 15 режима блока 11 сопряжения подключен к шине установки режима, выход ждущего генератора 6 подключен к счетному входу 28 измерителя 7 времени, разрядные выходы которого подключены к соответствующим разрядам информационных входов 32 регистра 8, разрядные выходы которого подключены к информационным входам 33 запоминающего блока 9.
Импульсные датчики IQ-IN перемещения можно вьтрлнить как контактными, так и бесконтактными, например это могут быть световые барьеры. На фиг. размеры измеряемых участков трассы полета обозначены как 1-, ,
Устройство работает следующим образом.
Принцип работы устройства основан на предположении постоянства ускорения модели на каждой паре соседних участков траектории: 1 и 1-4+ для i 0,...N. При линейном измерении скорости модели на участке 1 с постоянным ускорением А значение скорости в момент t определяется как
V At+Vn, где Vo - начальное значепричем второй вход последнего форми- j ние скорости, а время t-j пролета рователя 2ц заземлен, а выход первого формирователя 2о соединен с первым входом 22 триггера 3 и входом 27 запуска генератора 6, третьи входы формирователей 2 соединены между собой и подключены к шине 13 начальной установки, к которой также подключены входы 18-21 обнуления, прямой вы50
участка 1 определяют из выражения .. 21д Vi.4 +V-; (1)
где V, :и V, - значения скорости на
границах участка. Для каждой пары соседних участков составляют систему уравнений:
ход триггера 3 соединен с входом элемента 4 задержки, синхровходом 26 регистра 8 и входом 29 записи-считьша- ния запоминающего блока 9, выход элемента 4 задержки соединен с входом 17 установки в нулевое состояние
5
5
о
35
40
блока 10 индикации, порты 35 и 36 обмена соединены между собой и подключены к соответствующим разрядам информационного входа 34, соответствующие шины блока 11 сопряжения и ЭВМ 12 соединены между собой, вход 15 режима блока 11 сопряжения подключен к шине установки режима, выход ждущего генератора 6 подключен к счетному входу 28 измерителя 7 времени, разрядные выходы которого подключены к соответствующим разрядам информационных входов 32 регистра 8, разрядные выходы которого подключены к информационным входам 33 запоминающего блока 9.
Импульсные датчики IQ-IN перемещения можно вьтрлнить как контактными, так и бесконтактными, например это могут быть световые барьеры. На фиг. размеры измеряемых участков трассы полета обозначены как 1-, ,
Устройство работает следующим образом.
Принцип работы устройства основан на предположении постоянства ускорения модели на каждой паре соседних участков траектории: 1 и 1-4+ для i 0,...N. При линейном измерении скорости модели на участке 1 с постоянным ускорением А значение скорости в момент t определяется как
ние скорости, а время t-j пролета
участка 1 определяют из выражения .. 21д Vi.4 +V-; (1)
где V, :и V, - значения скорости на
границах участка. Для каждой пары соседних участков составляют систему уравнений:
Vi-1 +aHti;
(2)
Vj+aitjH V,-,,+ai(ti + tj,) (3)
Vi ,; (4)
Vi., 2(lH-H,,)/(t +t,H) (5)
Из данной системы уравнений для вычисления ускорения записывают:
. о l-i+,ti-ls tn4{
a-i
titi,()
Далее вычисляют скорость в i-ta сечении трассы по формуле
Далее тактовые импульсы с выхода генератора 6 поступают на измеритель 7 и выполняется измерение вре- 10 мени пролета первого участка.
При пересечении моделью плоскости второго датчика i к второму формирователе 2t поступает импульс. На выходе формирователя 2 вырабатывает -- - -- )
Таким образом, вычисляя для каждой пары соседних участков значения скорости V и ускорения а; в исследуемых
сечениях траектории, можно контроли- „„„улье, поступающий через первый ровать указанные параметры движения формирователь 2„ на вход 22 триггера 3, устанавливая его в единичное состояние. При этом генератор 6 остается в режиме выработки импульсов. 20 К этому моменту в измерителе 7 сформирован код, характеризующий время t пролета участка li. Значение этого
модели вдоль трассы движения.
Перед началом эксперимента на шине режима устанавливается режим Измерение, который поступает на вход 15 блока И сопряжения. На входы 14 эа- дают коэффициент К преобразования в зависимости от требуемой точности изкода по фронту 0/J сигнала на выходе триггера 3 заносится в регистр 8.
кода по фронту 0/J сигнала на выходе триггера 3 заносится в регистр 8.
мерения и диапазона исследуемых скоростей. По шине 13 начальной установ- 35 Кроме того,на входе 29 вновь уста- ки подается импульс, который обнуляет содержимое счетчика 5, измерителя 7 времени и регистра 8, а также устанавливает формирователи 2, генератор 6 и триггер 3 в начальное сос тояние,
навливается режим записи и значение кода t записьшается в блок 9 по адресу 0.,.0. Далее через время tja триггер 3 устанавливается в нулевое 30 состояние, а счетчик 5 увеличивает , значение на единицу. Измеритель 7 про должает счет тактовых импульсов.
При пересечении моделью плоскости
третьего датчика in работу устройст- заданной длительности, который посту- осуществляется аналогично. К это- пает йа первьй вход 22 триггера 3, „у моменту в измерителе будет устанавливая его в единичное состояПри пересечении моделью плоскости перового датчика Jo к первому формирователю 2а вырабатывается импульс
сформирован код, характеризующий вре мя t t пролета участков 1 + Ig В устройстве используется общее изние, и на вход 27 запуска ждущего генератора 6 импульсов, инициируя выработку на его выходе тактовые импульсы (ТИ) с периодо , которые поступают на счетный вход цифрового измерителя 7. Одновременно изменение состояния триггера 3 по фронту 0/1 сигнала на его прямом вы- }соде заносится значение цифрового измерителя 7 в регистр 8 (значение О,..О для первого датчика J,) и устанавливается по входу 29 запоми- вающего блока 9 режим записи,
Таким образом, по адресу О,.О дпя первого датчика, установленному на счетчике 5, записывается код с ре гистра 8. Через время tjc, требуемое на запись в запоминающий блок, на выходе элемента 4 задержки вырабатывается импульс, кото1я 1й поступает на счетный вход 24 счетчика 5, увеличивая его значение на единицу.
т.е. устанавливает адрес следующего датчика, а также поступает на вход 17 триггера 3, устанавливая его в нулевое состояние и запрещает запись в память,
Далее тактовые импульсы с выхода генератора 6 поступают на измеритель 7 и выполняется измерение вре- 10 мени пролета первого участка.
При пересечении моделью плоскости второго датчика i к второму формирователе 2t поступает импульс. На выходе формирователя 2 вырабатывает
„„„улье, поступающий через первый формирователь 2„ на вход 22 триггекода по фронту 0/J сигнала на выходе триггера 3 заносится в регистр 8.
Кроме того,на входе 29 вновь уста-
третьего датчика in работу устройст- осуществляется аналогично. К это- „у моменту в измерителе будет
сформирован код, характеризующий вре мя t t пролета участков 1 + Ig В устройстве используется общее из0 мерение времени от момента пересечения первого датчика i о и запоминания соответствующих промежуточных значений; Б дальнейшем (для последующих датчиков), работа устройства осуще5 ствляется аналогично.
При пересечении моделью плоскости (N+)-го датчика l в запоминающий блок записывается код, характеризующий время + ,.. ttf пролета
0 участков L + 1 + ,, ,+1ц,Кроме того, по импульсу, поступающему на счетный вход 24 счетчика 5, вырабатывается импульс на его выходе 16 переполнения, который останавливает по вхо5-ДУ 25 генератор 6 импульсов.
По окончании измерений вывод результатов измерений на индикацию может вьшолняться в автономном режиме, без участия ЭВМ 12, Для этого необходимо подать импульс по шине 13 начальной установки. При этом нулевое состояние триггера 3 указывает на ре- Жим считывания для запоминающего устройства. Адрес (номер) датчика и счи- тьшаемая из блока 9 информация поступают на соответствующие входы 3 и 34 блока IО индикации и выдаются . на табло индикации. Считывание измеренных интервалов выполняется после- 1овательно при подаче одиночных им- |1ульсов на, счетный вход 23 счетчика 5.
Для автоматического ввода резуль- 15 шина последовательного пересчета адтатов измерений в ЭВМ устройство переводится в режим Обработка. При этом на шине режима устанавливается . соответствующее значение, которое поступает на блок П сопряжения. Далее Под управлением ЭВМ производится об- |1ен информацией между запоминающим устройством 9 и ЭВМ 12. Алгоритм об- работкк результатов измерений приведен на фиг.2. Результаты обработки Ногут быть выведены на экран, дисплея |распечатаны по АЦПУ шш выданы соот- Ветствуюв1ие графики на графопострои- те.т.
При проведении экспериментов раз- 30нуления двоичного счетчика, измеритерядность измерителя 7 и коэффициент Кля времени, ждущего генератора имна входах 14 выбирают такими, чтобыnyjibcoB и триггера, выход которого
было возможно измерение временногосоединен с входом синхронизации рейнтервала t.f+ t( + ...+t( .гистра, входом управления режимом заДля уменьшения разрядности измери- ggписи-считывания запоминающего блока,
теля 7 достаточно выбрать разрядность,выходы которого соединены с блоком
требуемую для измерения интервалаиндикации, и входом элемента задержtnaxки, выход которого соединен с вторым
Тогда для определения момен-. обнуления триггера и с пер Q вым счетным входом двоичного счетчика, второй счетный вход которого подключен к шине последовательного пересчета адресов, а разрядные выходы подключены к соответствующим разрядам 45 адресных входов запоминающего блока и блока индикации, выход переполнения двоичного счетчика подключен к входу остановки ждущего генератора импульсов, шина режима подключена к вторым входам блока сопряжения, выход ждущего генератора подключен к счетному вхо-- ду измерителя времени, разрядные о рмула изобретения ходы которого подключены к соответ,йт- Устройство для измерения скорости вующим разрядам информационных входвижения моделей, содержащее дат- дов регистра.
Тогда для определения момента времени пересечения моделью i-ro датчика необходимо к измеренному коду прибавить максимальное значение измерителя умноженное на (1-1).
Измеритель 7 времени вьшолняет сквозное измерение, что позволяет увеличить точность измерения интервалов времени, а также позволяет при обработке результатов исключить из обработки те значения интервалов t, которые соответствуют ложным сраба- 50 тиваниям датчиков.
чиков перемещения, подключенных к первым входам N+J формирователей импульсов, измеритель времени, двоичный счетчик, триггер, ЭВМ, выход перг Вого формирователя импульсов соединен с входом .установки триггера в единичное состояние, отличающееся тем, что, с целью повыше- ния быстродействия и помехоустойчивости, расширения области применения, в него дополнительно введены элемент задержки, блок индикации, ждущий генератор импульсов, шина установки.
ресов, шина режима последовательно соединенные регистр, запоминающий блок, блок сопряжения и ЭВМ, причем второй вход каждого формирователя импульсов подключен к выходу последующего формирователя, при этом все формирователи последовательно соединены друг с другом, а второй вход N-ro формирователя заземлен, выход первого формирователя соединен с входом запуска ждущего генератора импульсов, третьи входа формирователей импульсов объединены и подключены к шине установки, к которой подключены входы об( Начало J
/ввод размероб / /у/астноё Ij /
i/h
s H
1
,( /foHeu 3
i/h
i
ssodf/3fie e/fff6/jr HmepSff oS tj
I
Bb/Sod fle3t/ 6/ncffTK
e
Фг/г.г
| Устройство для измерения скорости | 1975 |
|
SU569949A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения скорости движения объекта на заданном участке перемещения | 1977 |
|
SU711475A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения параметров движения объектов | 1983 |
|
SU1134914A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
