| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения исполнительного органа | 1988 |
|
SU1548037A1 |
| Автоматизированный сортировщик-подборщик манипулятора-трипода | 2019 |
|
RU2722960C1 |
| ШАРНИРНО-ДИСТРАКЦИОННЫЙ АППАРАТ С СИСТЕМОЙ КОНТРОЛЯ И НАСТРОЙКИ | 2003 |
|
RU2240749C1 |
| Робот-манипулятор | 2018 |
|
RU2700304C1 |
| Погрузочно-транспортный агрегат | 2022 |
|
RU2776189C1 |
| Робот-погрузчик сеток с овощами | 2021 |
|
RU2764855C1 |
| Обрабатывающее устройство | 1988 |
|
SU1523337A1 |
| ШАРНИРНО-ДИСТРАКЦИОННЫЙ АППАРАТ | 2003 |
|
RU2240748C1 |
| Манипулятор-трипод промышленного назначения | 2017 |
|
RU2651781C1 |
| Робот-манипулятор | 2024 |
|
RU2833264C1 |
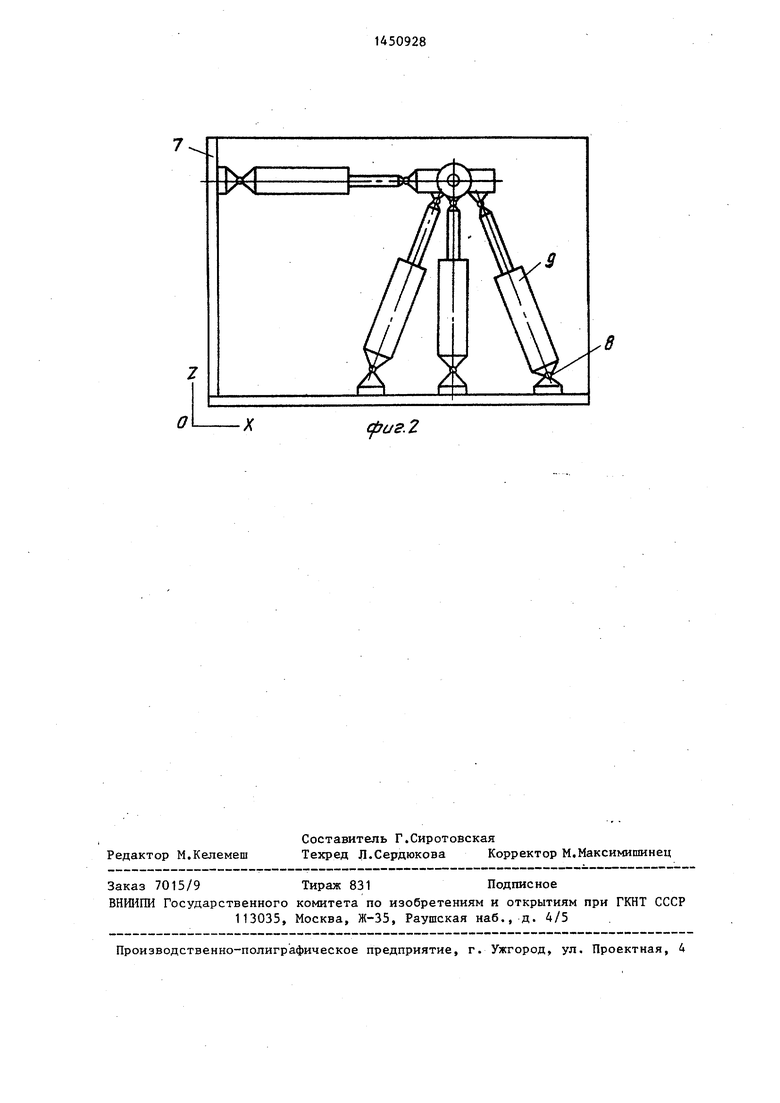
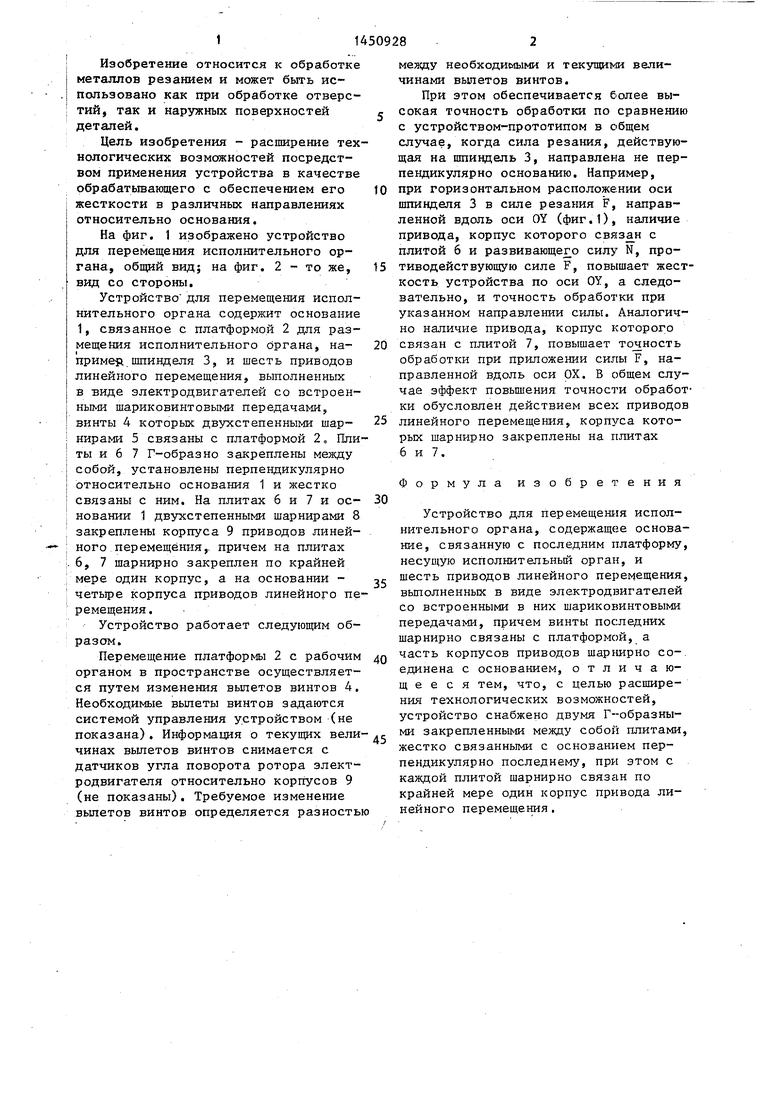
Изобретение относится к области обработки металлов резанием и может быть использовано как при обработке отверстий, так и наружных поверхностей деталей. Цель изобретения - расширение технологических возможностей посредством применения устройства в качестве обрабатывающего с обеспечением его жесткости в различных направлениях относительно основания. Основание 1 связано с платформой 2 для размещения шпинделя 3 посредством приводов линейного перемещения, выполненных в виде электродвигателей со встроенными шариковинтовыми передачами. Винты 4 последних связаны двухстепенными шарнирами 5 с платформой 2. Плита 6 жестко связана с плитой, расположенной Г-образно относительно плиты 6. Обе плиты жестко связаны с основанием и установлены перпендикулярно по отношению к нему. На плитах и основании 1 двухстепенными шарнирами закреплены корпуса приводов линейного перемещения, причем на плитах шарнирно закреплен по крайней мере один корпус привода. 2 ил. сл
| Устройство для перемещения исполнительного органа | 1984 |
|
SU1224137A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
