4
ю
ю
С СО
оэ
4j
10 , -t
Изобретение относится к машиностроению и может быть использовано при обработке деталей со сложными поверхностями.
Целью изобретения является упрощение управления устройством.
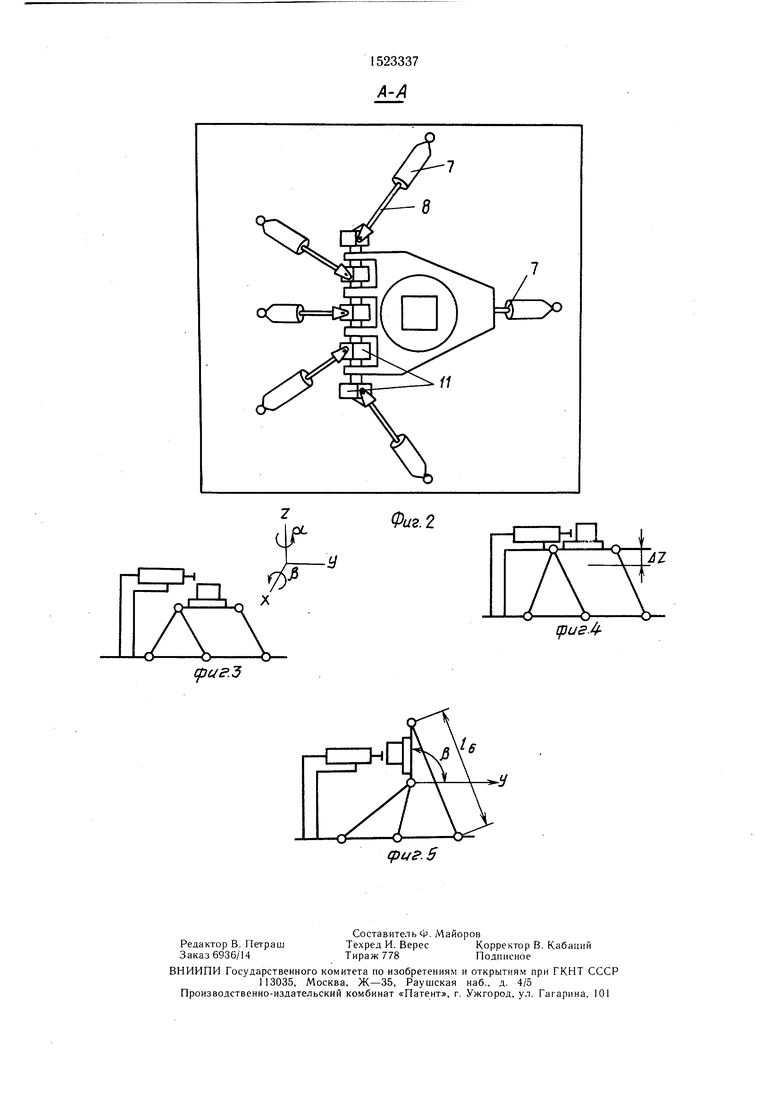
На фиг. 1 показано устройство, общий вид; на фиг. 2 - разрез А-А на фиг. Г, на фиг. 3-5 - последовательность работы устройства . при обработке детали с пяти сторон.
Обрабатывающее устройство содержит основание 1, инструментальную головку 2, размещенную на стойке 3, жестко связанной с основанием 1, платформу 4 с установленным на ней поворотным столом 5, для размещения обрабатываемой детали 6, щесть приводов 7 с линейным перемещением выходных элементов 8, корпуса 9 которых посредством щарниров 10 с двумя взаимно перпендикулярны.ми осями закреплены на основании 1, а выходные эле менты 8 - на платформе 4. Причем оси поворота пяти щарниров, неподвижные относительно платформы, расположены
на одной прямой.
Например, крестовины 11 щарниров 10 (фиг. 1 и 2) могут быть установлены на одной оси 12, жестко связанной с платформой 4,
-Устройство работает следующим образом.
При обработке детали 6 система управления (не показана) .выдает задающие воздействия на изменение вылетов выходных элементов 8 привода 7, что обеспечивает перемещение платформы 4, а вместе с
5 ней и детали 6 вдоль осей X, Y, Z декартовой системы координат (фиг. 3). При этом требуемые удлинения 1, выходных элементов 8 приводов 7 определяются для всех приводов следующей формулой: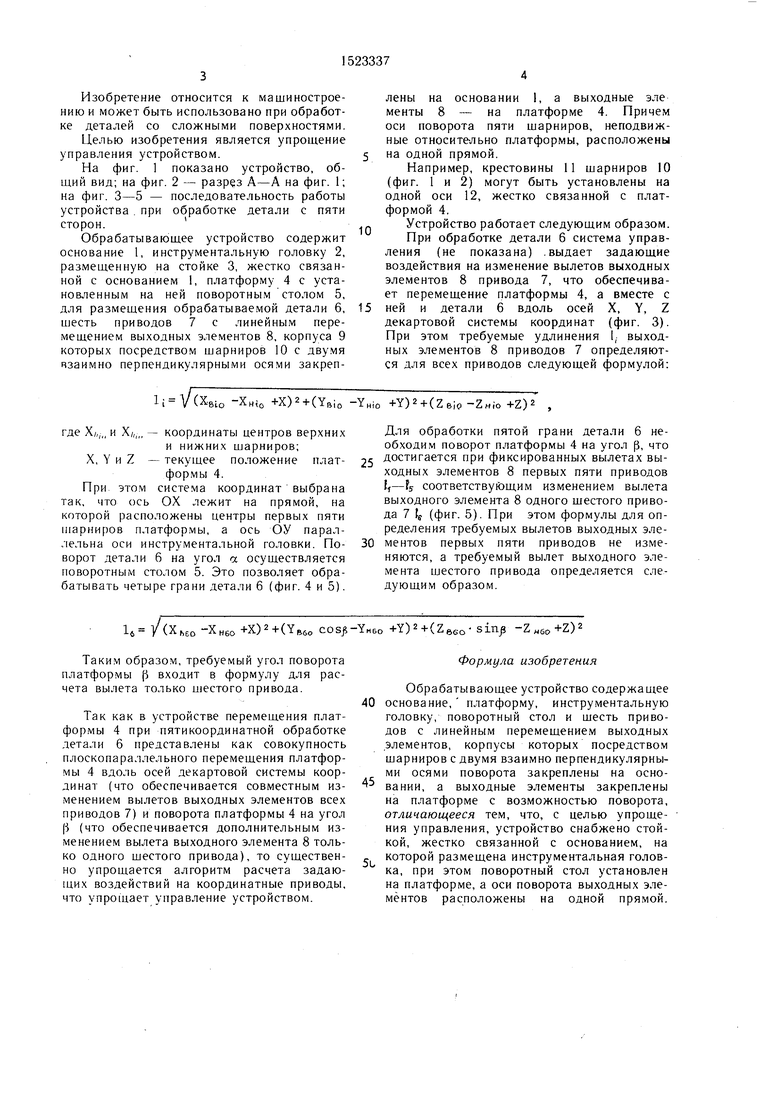
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСОКОСКОРОСТНОЙ МЕТАЛЛОРЕЖУЩИЙ ПЯТИКООРДИНАТНЫЙ ЦЕНТР С ТРИПОД-МОДУЛЕМ | 2005 |
|
RU2285602C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ СЛОЖНЫХ ПОВЕРХНОСТЕЙ ВЫСОКОСКОРОСТНЫМ ФРЕЗЕРОВАНИЕМ | 2012 |
|
RU2544710C2 |
| МЕТАЛЛОРЕЖУЩИЙ ГЕКСАПОДНЫЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР И ГЕКСАПОДНЫЙ МЕХАНИЗМ ДЛЯ НЕГО | 2005 |
|
RU2299797C2 |
| Обрабатывающее устройство | 1985 |
|
SU1296401A1 |
| Станок для пятикоординатной обработки вращающимся инструментом пространственно-сложных криволинейных поверхностей | 1972 |
|
SU491252A1 |
| ПЯТИКООРДИНАТНАЯ УСТАНОВКА ДЛЯ ТРЕХМЕРНОЙ ПРЕЦИЗИОННОЙ ГИДРОСТРУЙНОЙ РЕЗКИ | 2010 |
|
RU2453417C2 |
| ОБРАБАТЫВАЮЩИЙ ЦЕНТР С ПАРАЛЛЕЛЬНОЙ КИНЕМАТИКОЙ | 2012 |
|
RU2547359C2 |
| УСТАНОВКА ДЛЯ ПОЛУЧЕНИЯ НАНОСТРУКТУРИРОВАННЫХ СЛОЕВ НА ПОВЕРХНОСТИ СЛОЖНОПРОФИЛЬНЫХ ДЕТАЛЕЙ МЕТОДОМ ЛАЗЕРНО-ПЛАЗМЕННОЙ ОБРАБОТКИ | 2011 |
|
RU2463246C1 |
| КОМПОНОВКА МНОГОЦЕЛЕВОГО СТАНКА НА ОСНОВЕ ПРИНЦИПОВ ПАРАЛЛЕЛЬНОЙ КИНЕМАТИКИ | 2013 |
|
RU2542878C2 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ВОЛОКОННЫМ ЛАЗЕРОМ ОБЪЕМНЫХ ДЕТАЛЕЙ | 2008 |
|
RU2386523C1 |
Изобретение относится к машиностроению и может быть использовано при обработке деталей со сложными поверхностями. Целью изобретения является упрощение управления устройством. При обработке детали 6 посредством инструментальной головки 2 система управления выдает задающие воздействия на изменение вылетов выходных элементов приводов, что обеспечивает перемещение платформы 4, а вместе с ней и детали 6 вдоль осей X,Y,Z. Таким образом движение платформы 4 при пятикоординатной обработке детали разделяется на два движения - плоскопараллельное, вдоль осей декартовой системы координат ( за счет совместного движения всех приводов ), и поворот платформы 4 вокруг общей оси пяти шарниров 10 платформы 1 за счет только одного привода. 5 ил.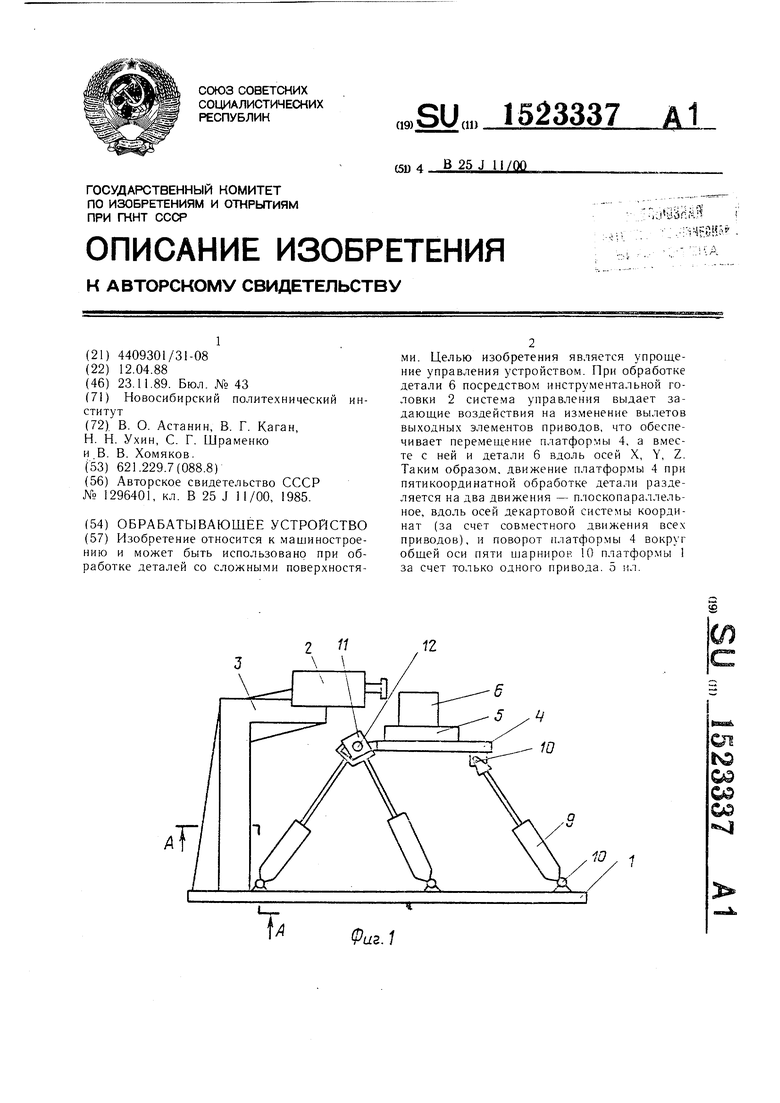
li V(X8lo -Хн(о +X)2+(YRio -Ynio +Y)2+(Z6io-ZHio 4-Z)2 ,
где Х/,„, и Х/,„, - координаты центров верхних
и нижних щарниров; X, Y и Z - текущее положение платформы 4.
При этом система координат выбрана так, что ось ОХ лежит на прямой, на которой расположены центры первых пяти щарниров платформы, а ось ОУ параллельна оси инструментальной головки. Поворот детали 6 на угол а. осуществляется поворотным столом 5. Это позволяет обрабатывать четыре грани детали 6 (фиг. 4 и 5).
1 /(Хьбо -Хнбо +Х)2+(Увбо COSJ5-YH60 +Y)2+(Ze6o- sin -Z +Z}
Таким образом, требуемый угол поворота платформы р входит в формулу для расчета вылета только щестого привода.
Так как в устройстве перемещения платформы 4 при пятикоординатной обработке детали 6 представлены как совокупность плоскопараллельного перемещения платформы 4 вдоль осей декартовой системы координат (что обеспечивается совместным изменением вылетов выходных элементов всех приводов 7) и поворота платформы 4 на угол (5 (что обеспечивается дополнительным изменением вылета выходного элемента 8 только одного щестого привода), то существенно упрощается алгоритм расчета задающих воздействий на координатные приводы, что упрощает управление устройством.
Для обработки пятой грани детали 6 необходим поворот платформы 4 на угол р, что
достигается при фиксированных вылетах выходных элементов 8 первых пяти приводов соответствукэщим изменением вылета выходного элемента 8 одного щестого привода 7 Ij (фиг. 5). При этом формулы для определения требуемых вылетов выходных элементов первых пяти приводов не изменяются, а требуемый вылет выходного элемента щестого привода определяется следующим образом.
Формула изобретения
Обрабатывающее устройство содержащее основание, платформу, инструментальную головку, поворотный стол и щесть приводов с линейным перемещением выходных элементов, корпусы которых посредством щарниров с двумя взаимно перпендикулярными осями поворота закреплены на основании, а выходные элементы закреплены на платформе с возможностью поворота, отличающееся тем, что, с целью упрощения управления, устройство снабжено стойкой, жестко связанной с основанием, на которой размещена инструментальная головка, при этом поворотный стол установлен на платформе, а оси поворота выходных элементов расположены на одной прямой.
IT
У
ере/г.З
А-А
1раг.4
| Обрабатывающее устройство | 1985 |
|
SU1296401A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
