Фиг.1
Изобретение относится к машиностроению и может быть использовано для автоматизации перемещения исполнительных органов, например, при обработке металлов резанием.
Целью изобретения является расширение технологических возможностей путем увеличения рабочей зоны исполнительного органа.
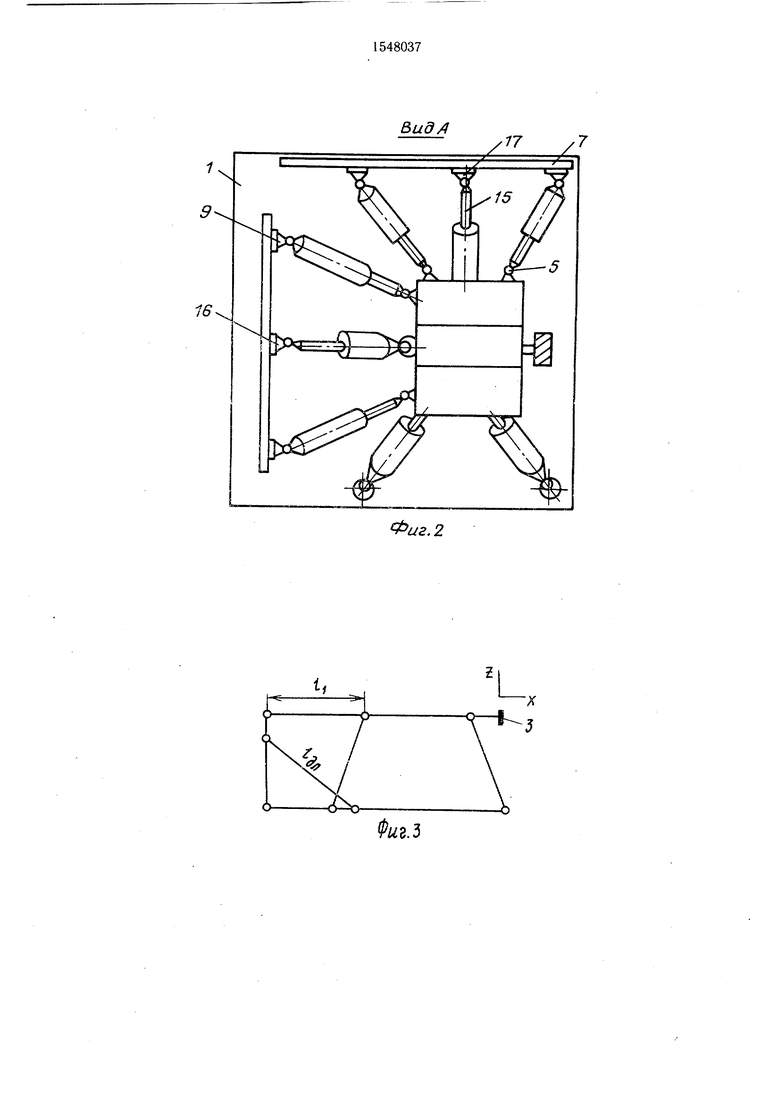
На фиг. 1 представлено устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - схема устройства в исходном положении; на фиг. 4 - схема устройства при максимальном перемещении по оси X без наклона плиты; на фиг. 5 - схема устройства с наклоном плиты.
Устройство для перемещения исполнительного органа содержит основание 1, платформу 2 для размещения исполнительного органа 3, например шпинделя, и шесть основных приводов линейного перемещения, выполненных в виде электродвигателей с встроенными шариковинтовыми передачами, винты 4 которых двухстепенными шарнирами 5 связаны с платформой 2, две плиты 6 и 7, закрепленные на основании с возможностью изменения угла наклона к основанию посредством одностепенных шарниров 8. На каждой из плит 6 и 7 и основании 1 закреплены посредством двухстепенных шарниров 9 по два корпуса 10 основных приводов линейного перемещения. Корпуса 11 и 12 дополнительных приводов закреплены на основании двухстепенными шарнирами 13, а винты 14 и 15 дополнительных приводов закреплены двухстепенными шарнирами 16 и 17 соответственно на плитах 6 и 7.
Устройство работает следующим образом.
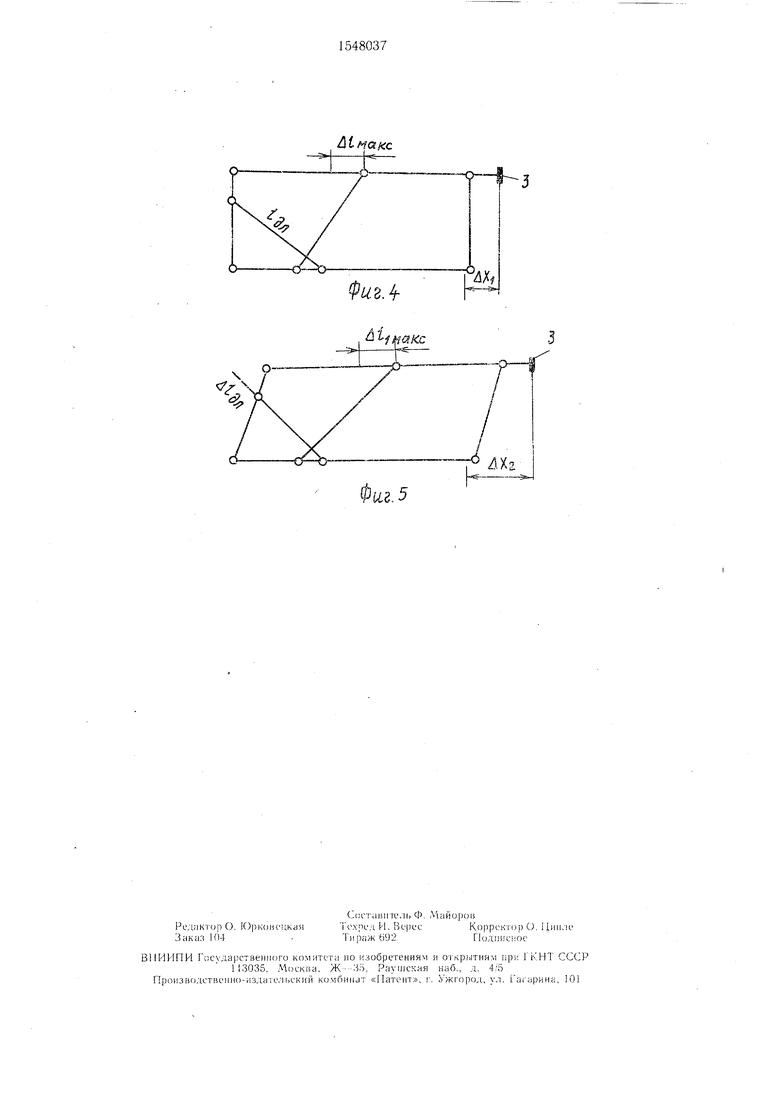
В начальном положении плиты б и 7 расположены Г-образно и перпендикулярно основанию (фиг. 1 и 2). Перемещение платформы 2 в пространстве с размещенным на ней исполнительным органом 3 осуществляется путем изменения вылета винтов 4 основных приводов. Необходимые величины вылета винтов 4, 14 и 15 задаются системой управления устройством (не показана). При этом для начального положения плит перемещение AXI исполнительного органа по одной из координат, например X (фиг. 4), ограничивается максимально возможным
0
приращением длины одного из винтов, например Ломаке (на фиг. 3-5 для простоты показан случай расположения указанного винта параллельно плоскости ХОТ.). При необходимости увеличения максимально возможных перемещений по координате X производится наклон плиты 6 на соответствующий угол посредством изменения вылета /дл (фиг. 3 и 4) винта 14 дополнительного привода на величину А/дл (фиг. 5) и согласованных с ним изменений вылетов винтов 4, осуществляемых системой управления устройством. При том же ограничении по величине Ломаке максимальное перемещение по координате X в этом случае равно Ах2, при этом .
Аналогично достигается увеличение возможных перемещений исполнительного органа по координате Y при изменении угла наклона плиты 7 посредством изменения вылета винта 15 и согласованных с ним изменений вылетов винтов 4.
За счет введения дополнительных приводов, связанных с основанием и плитами 6 и 7, достигается жесткость устройства, и выполнение плит 6 и 7 с возможностью изменения их угла наклона к основанию 1 позволяет увеличить значения возможных координатных перемещений без увеличения максимальных длин винтов 4 основных приводов
Формула изобретения
0
Устройство для перемещения исполнительного органа, содержащее основание, платформу, несущую исполнительный орган, две плиты, установленные на основании, и шесть основных приводов линейного перемещения, одни концы которых шарнирно связаны с платформой, а другие - с плитами и основанием, при этом с каждой плитой связан по крайней мере один привод, отличающееся тем, что, с целью расширения технологических возможностей путем увеличения оабочей зоны исполнительного органа, оно снабжено двумя дополнительными приводами линейного перемещения, а плиты установлены с возможностью изменения их угла наклона к основанию, при этом каждый
5 дополнительный привод одним концом шарнирно связан с соответствующей плитой, а другим - с основанием.
5
5
0
Вид/1
/
/7
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот-манипулятор | 2018 |
|
RU2700304C1 |
| Манипулятор-трипод промышленного назначения | 2017 |
|
RU2651781C1 |
| Робот-манипулятор | 2024 |
|
RU2833264C1 |
| Робот-погрузчик сеток с овощами | 2019 |
|
RU2722747C1 |
| ВЫСОКОСКОРОСТНОЙ МЕТАЛЛОРЕЖУЩИЙ ПЯТИКООРДИНАТНЫЙ ЦЕНТР С ТРИПОД-МОДУЛЕМ | 2005 |
|
RU2285602C1 |
| Устройство для перемещения исполнительного органа | 1984 |
|
SU1224137A1 |
| Погрузочно-транспортный агрегат | 2022 |
|
RU2776189C1 |
| Устройство для перемещения исполнительного органа | 1987 |
|
SU1450928A1 |
| ШАРНИРНО-ДИСТРАКЦИОННЫЙ АППАРАТ | 2003 |
|
RU2240748C1 |
| МЕТАЛЛОРЕЖУЩИЙ ГЕКСАПОДНЫЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР И ГЕКСАПОДНЫЙ МЕХАНИЗМ ДЛЯ НЕГО | 2005 |
|
RU2299797C2 |
Изобретение относится к машиностроению и может быть использовано для автоматизации перемещений исполнительных органов, например, при обработке металлов резанием. Целью изобретения является расширение технологических возможностей путем увеличения рабочей зоны исполнительного органа. Перемещение исполнительного органа 3, установленного на платформе 2, осуществляется по координате Х или У изменениями длины основных приводов за счет вывинчивания винтов 4, шарнирно связанных с платформой 2, корпуса этих приводов шарнирно связаны с плитами. Дополнительное перемещение исполнительного органа обеспечивается по координате Х наклоном плиты 6 при ввинчивании винта 14 первого дополнительного привода, по координате У наклоном другой плиты при ввинчивании винта 15 второго дополнительного привода. 5 ил.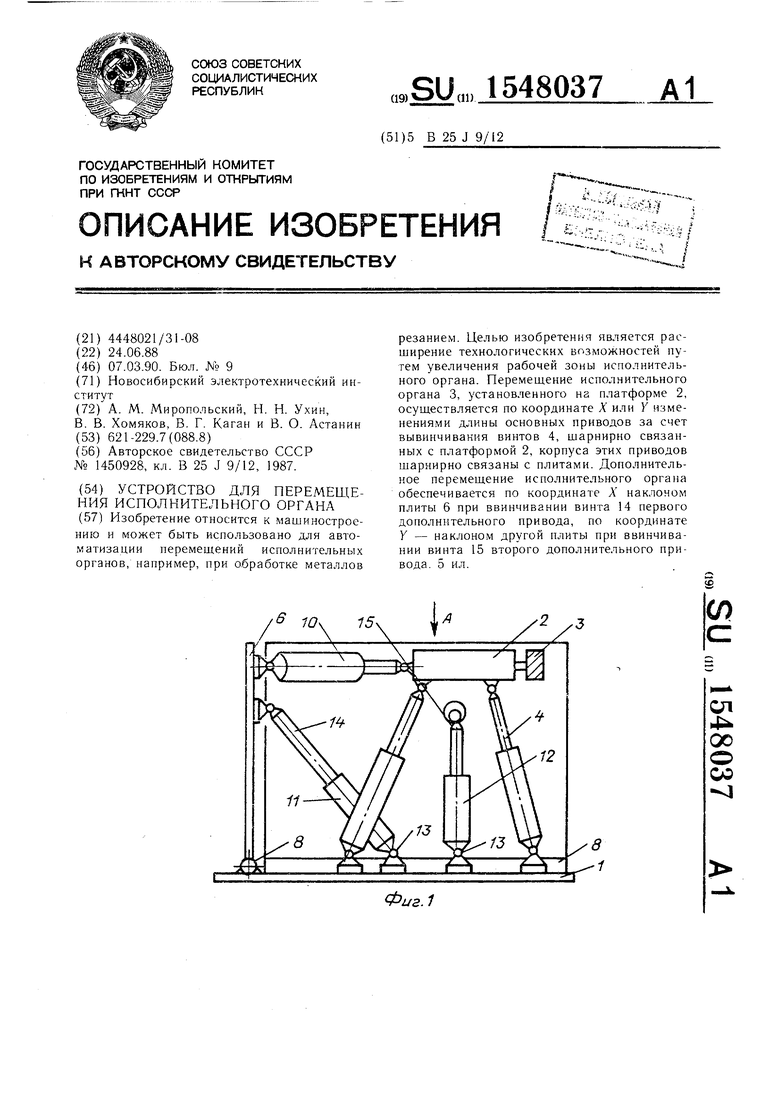
16
Фиг. 2
Фиг.З
41 мак
Фи.2.
| Устройство для перемещения исполнительного органа | 1987 |
|
SU1450928A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
