О1
СП
Ы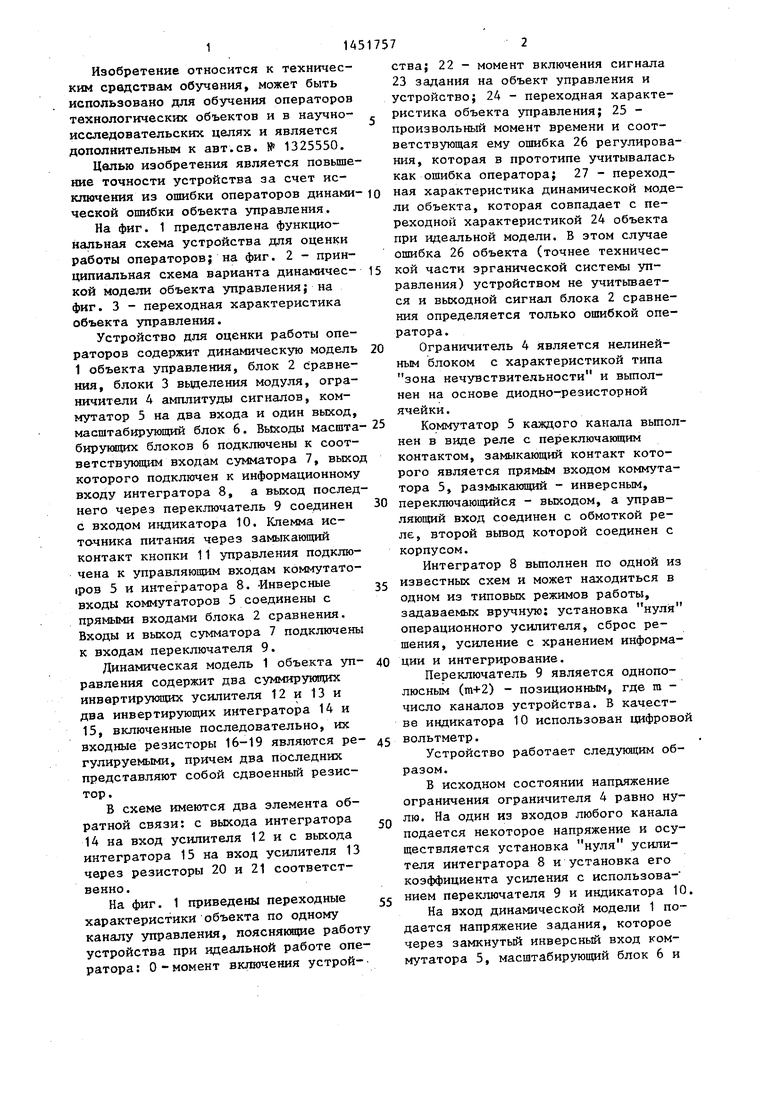
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оценки работы операторов | 1987 |
|
SU1441442A1 |
| Устройство для оценки работы операторов | 1986 |
|
SU1325550A1 |
| Устройство для оценки работы операторов | 1987 |
|
SU1413658A1 |
| Устройство для управления приводом тормоза шахтной подъемной машины | 1988 |
|
SU1680614A1 |
| Тренажер оператора энергетического объекта | 1978 |
|
SU1160462A1 |
| ТРЕНАЖЕР ОПЕРАТОРОВ СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 1990 |
|
RU2047909C1 |
| Устройство для оценки деятельности операторов | 1985 |
|
SU1368907A1 |
| Устройство для контроля работы операторов | 1984 |
|
SU1290394A1 |
| Обучающее устройство | 1984 |
|
SU1249566A1 |
| Устройство для решения линейных интегральных уравнений (его варианты) | 1985 |
|
SU1278899A2 |
Изобретение относится к техническим средствам обучения и может быть использовано для обучения операторов технологических объектов и в научно-исследовательских целях.Цель изобретения - повышение точности, достоверности и дидактических возможностей устройства за счет исключения из ошибки оператора динамической ошибки объекта управления. Новым в устройстве является введение на выходе устройства динамических моделей объектов управления, каждая из которых содержит два усилителя, два интегратора и два элемента обратной связи с соответствующими связями между ними. 1 з.п.ф-лы, 3 ил.
го
Изобретение относится к техническим средствам обучения, может быть использовано для обучения операторов технологических объектов и в научно- исследовательских целях и является дополнительным к авт.св. № 1325550.
Целью изобретения является повышение точности устройства за счет исключения из ошибки операторов динами- ческой ошибки объекта управления.
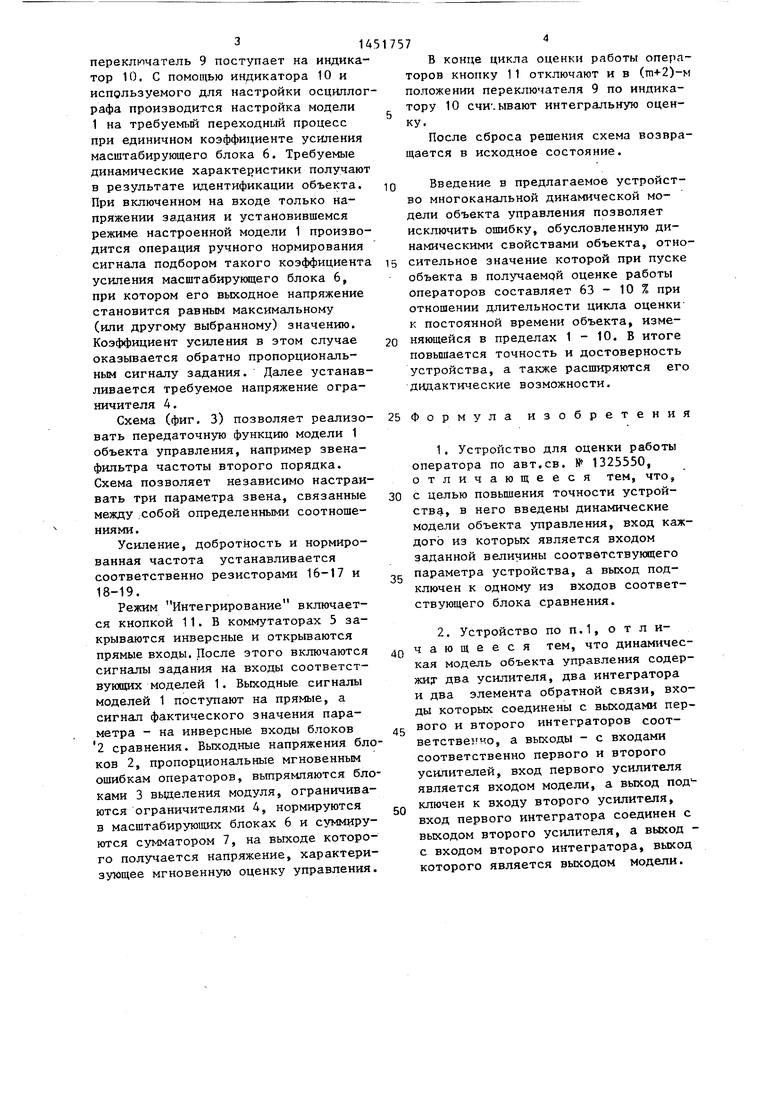
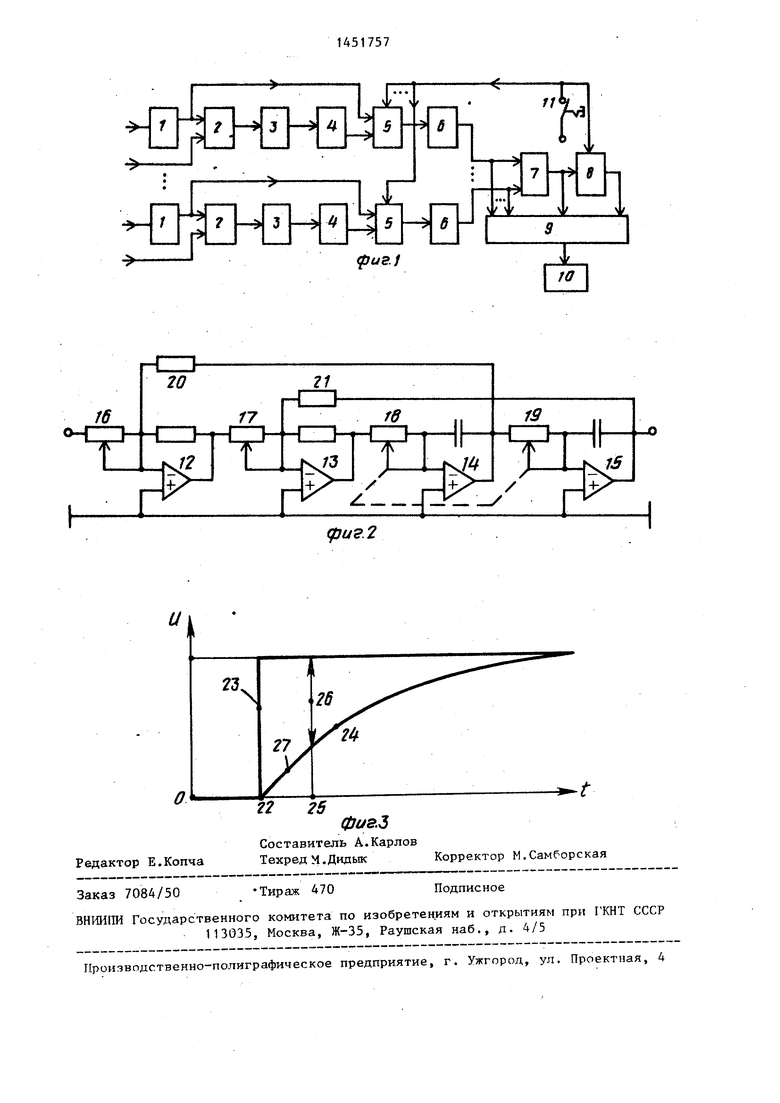
На фиг. 1 представлена функциональная схема устройства для оценки работы операторов; на фиг. 2 - принципиальная схема варианта динамичес- кой модели объекта управления; на фиг. 3 - переходная характеристика объекта управления.
Устройство для оценки работы операторов содержит динамическую модель 1 объекта управления, блок 2 сравнения, блоки 3 вьщеления модуля, ограничители 4 амплитуды сигналов, коммутатор 5 на два входа и один выход, масштабирующий блок 6. Выходы масшта бирукшщх блоков 6 подключены к соответствующим входам сумматора 7, выхо которого подключен к информационному входу интегратора 8, а выход последнего через переключатель 9 соединен с входом индикатора 10. Клемма ис- тачника питания через замыкающий контакт кнопки 11 управления подключена к управляющим входам коммутато- ipoB 5 и интегратора 8. -Инверсные входы коммутаторов 5 соединены с прямыми входами блока 2 сравнения. Входы и выход сумматора 7 подключены к входам переключателя 9.
Динамическая модель 1 объекта уп- равления содержит два суммируняцих инвертирующих усилителя 12 и 13 и два инвертирующих интегратора 14 и 15, включенные последовательно, их входные резисторы 16-19 являются ре гулируемьп-ш, причем два последних представляют собой сдвоенный резистор.
В схеме имеются два элемента обратной связи: с выхода интегратора 14 на вход усилителя 12 и с выхода интегратора 15 на вход усилителя 13 через резисторы 20 и 21 соответственно.
На фиг. 1 приведены переходные характеристики объекта по одному каналу управления, поясняющие работ устройства при идеальной работе оператора: О-момент включения устройства; 22 - момент включения сигнала 23 задания на объект управления и устройство; 24 - переходная характеристика объекта управления; 25 - произвольный момент времени и соответствующая ему ошибка 26 регулирования, которая в прототипе учитывалась как ошибка оператора; 27 - переходная характеристика динамической модели объекта, которая совпадает с переходной характеристикой 24 объекта при идеальной модели. В этом случае ошибка 26 объекта (точнее технической части эрганической системы управления) устройством не учитьшает- ся и выходной сигнал блока 2 сравнения определяется только ошибкой оператора.
Ограничитель 4 является нелинейным блоком с характеристикой типа зона нечувствительности и вьтол- нен на основе диодно-резисторной ячейки.
Коммутатор 5 каждого канала вьшол нен в виде реле с переключающим контактом, замыкающий контакт которого является прямым входом коммутатора 5, размыкающий - инверсным, переключающийся - выходом, а управляющий вход соединен с обмоткой реле, второй вывод которой соединен с корпусом.
Интегратор 8 вьтолнен по одной из известных схем и может находиться в одном из типовых режимов работы, задаваемых вручную: установка нул:я операционного усилителя, сброс решения, усиление с хранением информации и интегрирование.
Переключатель 9 является однополюсным (т+2) - позиционным, где m - число каналов устройства. В качестве индикатора 10 использован цифрово вольтметр.
Устройство работает следугацим образом.
В исходном состоянии напгхяжение ограничения ограничителя 4 равно нулю. На один из входов любого канала подается некоторое напряжение и осуществляется установка нуля усилителя интегратора 8 и установка его коэффициента усиления с использова- нием переключателя 9 и индикатора 1 На вход динамической модели 1 подается напряжение задания, которое через замкнутый инверсный вход коммутатора 5, масштабирующий блок 6 и
314
переключатель 9 поступает на индикатор 10, С помощью индикатора 10 и исп«эльзуемого для настройки осциллографа производится настройка модели 1 на требуемьй переходный процесс при единичном коэффициенте усиления масштабирующего блока 6, Требуемые динамические характеристики получают в результате идентификации объекта. При включенном на входе только напряжении задания и установивщемся режиме настроенной модели 1 производится операция ручного нормирования сигнала подбором такого коэффициента усиления масштабирующего блока 6, при котором его выходное напряжение становится равным максимальному (или другому выбранному) значению. Коэффициент усиления в этом случае оказывается обратно пропорциональным сигналу задания. Далее устанавливается требуемое напряжение ограничителя 4.
Схема (фиг. 3) позволяет реализовать передаточную функцию модели 1 объекта управления, например звена- фильтра частоты второго порядка. Схема позволяет независимо настраивать три параметра звена, связанные между ;Собой определенными соотношениями .
Усиление, добротность и нормированная частота устанавливается соответственно резисторами 16-17 и
18-19.
Режим Интегрирование включается кнопкой 11. В коммутаторах 5 закрываются инверсные и открываются прямые входы. После этого включаются сигналы задания на входы соответствующих моделей 1. Выходные сигналы моделей 1 поступают на прямые, а сигнал фактического значения параметра - на инверсные входы блоков 2 сравнения. Выходные напряжения блков 2, пропорциональные мгновенным ошибкам операторов, вьтрямпяются блками 3 выделения модуля, ограничиваются ограничителями 4, нормируются в масштабирующих блоках 6 и суммируются сумматором 7, на выходе которого получается напряжение, характеризующее мгновенную оценку управления
В конце цикла оценки работы операторов кнопку 1 1 отключают и в ()-м положении переключателя 9 по индикатору 10 счи . ывают интегральную оценку.
После сброса решения схема возвращается в исходное состояние.
Введение в предлагаемое устройство многоканальной динамической модели объекта управления позволяет исключить ошибку, обусловленную динамическими свойствами объекта, относительное значение которой при пуске объекта в получаемой оценке работы операторов составляет 63 - 10 % при отношении длительности цикла оценки- к постоянной времени объекта, изменяющейся в пределах 1 - Ю. В итоге повьпаается точность и достоверность устройства, а также расширяются его дидактические возможности.
0
Формула изобретени
ю щ е е с я тем, что.
о т л и ч а с целью повышения точности устройства, в него введены динамические модели объекта управления, вход каждого из которых является входом заданной величины соотввтствукицего параметра устройства, а выход подключен к одному из входов соответствующего блока сравнения.
(pu.2
Редактор Е.Копча Заказ 7084/50
22 25
фиг.З
Составитель А.Карлов
ТехредМ.Дидык Корректор М.Самборская
Тираж 470
Подписное
fJuS.1
to
Подписное
| Устройство для оценки работы операторов | 1986 |
|
SU1325550A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
