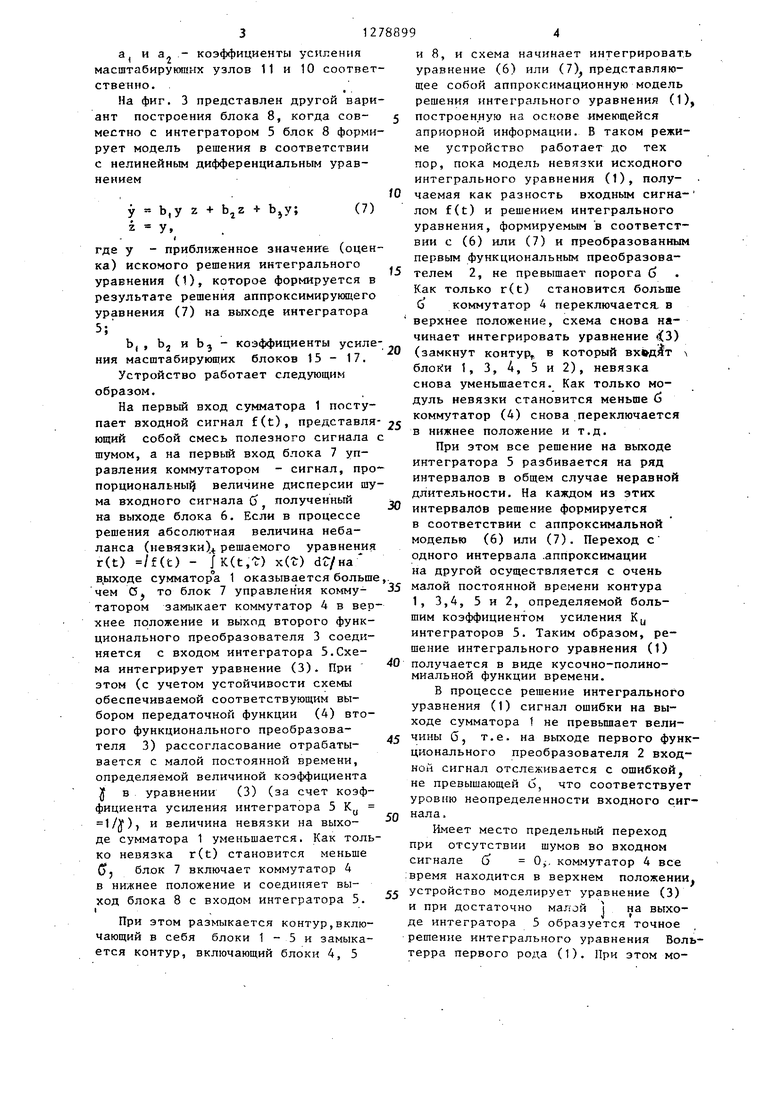
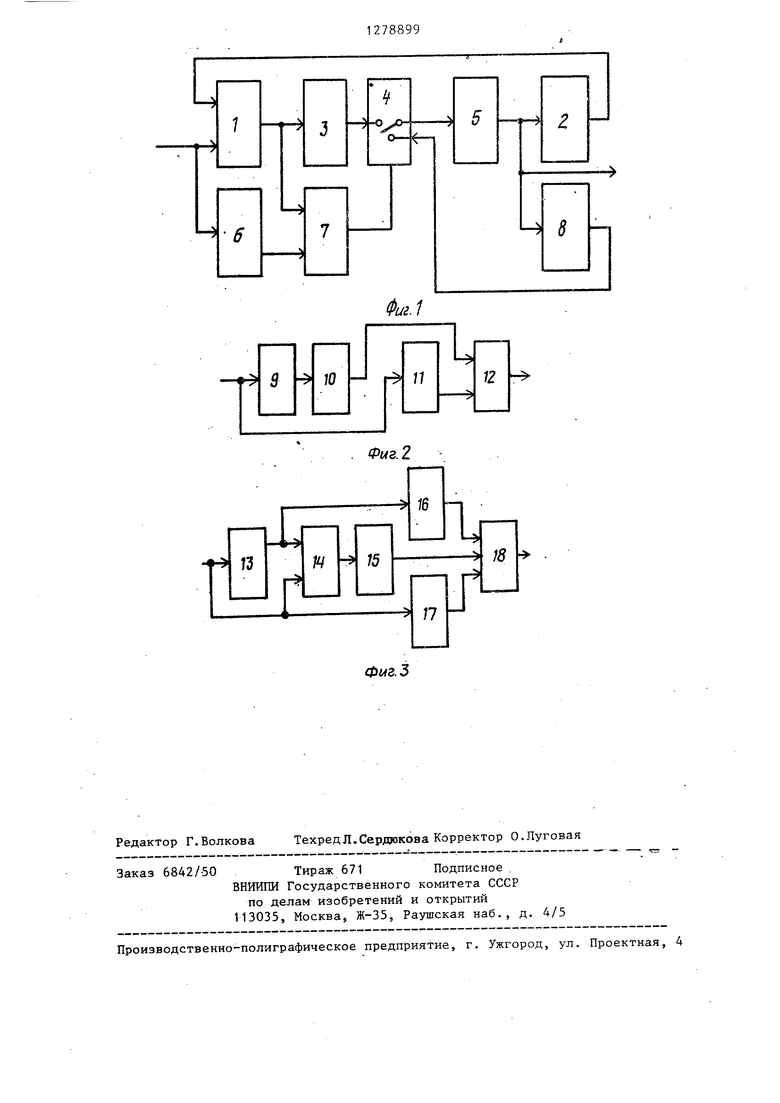
Изобретение относится к автоматическому управлению и аналоговой вычислительной технике, предназначено для устойчивого, приближенного решения линейных интегральных уравнений Вольтерра первого рода и является усовершенствованием известного устройства по ав4.св, № 926682. Целью изобретения является повышение точности. На фиг. 1 представлена блок-схема устройства; на фиг. 2 - структура блока формирования модели решения при аппроксимации линейным дифференциальным уравнением; на фиг. 3 то же, нелинейным дифференциальным уравнением. Устройство для решения линейных интегральных уравнений содержит сумматор 1, первый 2 и второй 3 функциональные преобразователи, коммутатор 4, блок 7 управления коммутатором и блок 8 формирования модели решения. Блок 8 (фиг. 2) содержит интегратор 9, масштабирукщие узлы 10 и 11 и сумматор 12. Блок 8 (фиг. 3) содержит интегратор 13, узел 14 умножения, масштабирующие узлы 15 17, сумматор 18. Выходом устройства является выход интегратора 5. Принцип работы устройства основан на динамическом методе ре.гуляции решения некорректно, поставленных задач. Устройство решает линейное интегральное уравнение Вольтерра первого рода К (t, ) x(t) dt f(t). которое для разностного ядра K(t,() K(t-D) может быть записано в изоб ражениях Лапласа следующим образом К(р)-х(р) F(p),
где К(р) K(t);
х(р) x(t); F(p) f(t).
Согласно динамическому методу регуляризации вместо (2) необходимо решать уравнение
урх(р) W,(p) Р(р) - К(р)
где J О, Wj.(p) - передаточная функ- (оценка) исходного решения интегральция корректирующего звена, введенно- ного уравнения (1), которое формируго для ликвидации структурной неус- е.тся на выходе интегратора 5;
На фиг. 2 представлен вариант-построения блока 8, который совместно с интегратором 5 формирует модель решения в соответст)зии с дифференциальным уравнением
+
У а,у
(3) 55 У
где у - приближенное значение ТОЙЧИВОСТИ схемы, выбирается так,- чтобы обеспечить устойчивость моделирующей схемы и апериодический характер переходного процесса. Так, например, передаточную функцию корректирующего звена, удовлетворяющую этим требованиям, всегда можно выбрать в виде дробно-рациональной функции р. В устройстве в качестве корректирующего звена используется второй функциональный преобразователь 3,. Схема второго функционального преобразователя 3 с передаточной функцией вида (4) может быть построена на основании известных методов. Первый функциональный преобразователь 2 реализует следующее преобразование:F x(t) J K(t,(r ) x(t) d (5) где x(t) - значение входной переменной;(t)J- значение выходной пеоеменной;K(t,t) - ядро интегрального урав-j нения. При решении интегральных уравнеНИИ с разностным ядром первый функциональньй преобразователь 2 представляет собой модель интегрального оператора (динамический линейный преобразователь) и может быть реализован известными способами:. Блок 8 совместно с интегратором 5 предназначен -для формирования приближенной (аппроксимационной) модели решения. В качестве примера приводятся два возможных варианта построения блока 8. а и а. - коэффициенты усиления масштабиругацнх узлов 11 и 10 соотве ственно, . На фиг. 3 представлен другой вар ант построения блока 8, когда совместно с интегратором 5 блок 8 форм рует модель решения в соответствии с нелинейным дифференциальным уравнениемЬ,у Z + bjZ -4- bjv; где у - приближенное значение (оце ка) искомого решения интегрального уравнения (1), которое формируется результате решения аппроксимирующег уравнения (7) на выходе интегратора 5; Ь,, bj и Ь - коэффициенты усил ния масштабирующих блоков 15 - 17. Устройство работает следующим образом, На первый вход сумматора 1 посту пает входной сигнал f(t), представл ЮЩИЙ собой смесь полезного сигнала шумом, а на первый вход блока 7 управления коммутатором - сигнал, пр порциональны() величине дисперсии шу ма входного сигнала б полученный на выходе блока 6, Если в процессе решения абсолютная величина небаланса (невязки) решаемого уравнени r(t) /f(t) - jK(t,) х(г) ае-/на выходе сумматора 1 оказывается больш чем С5, то блок 7 управления коммутатором замыкает коммутатор 4 в вер хнее положение и выход второго функционального преобразователя 3 соединяется с входом интегратора 5.Схема интегрирует уравнение (3). При этом (с учетом устойчивости схемы обеспечиваемой соответствующим выбором передаточной функции (4) второго функционального преобразователя 3) рассогласование отрабатывается с малой постоянной времени, определяемой величиной коэффициента в уравнении (3) (за счет коэффициента усиления интегратора 5 Ку 1/J), и величина невязки на выходе сумматора 1 уменьшается. Как толь ко невязка r(t) становится меньше Cj блок 7 включает коммутатор 4 в нижнее положение и соединяет выход блока 8 с входом интегратора 5. При этом размыкается контур,включающий в себя блоки 1 - 5 и замыкается контур, включающий блоки 4, 5 и 8, и схема начинает интегрировать уравнение (6) или (7) представляющее собой аппроксимационную модель решения интегрального уравнения (1), построенную на основе имеющейся априорной информации. В таком режиме устройство работает до тех пор, пока модель невязки исходного интегрального уравнения (1), получаемая как разность входным сигналом f(t) и решением интегрального уравнения, формируемым в соответствии с (6) или (7) и преобразованным первым функциональным преобразователем 2, не превышает порога б Как только r(t) становится больше Cj коммутатор 4 переключается, в верхнее положение, схема снова начинает интегрировать уравнение i(3) (замкнут контур в который вхад)1т блоки 1, 3, Д, 5 и 2), невязка снова уменьшается. Как только модуль невязки становится меньше б снова .переключается в нижнее положение и т.д. - с% f rti rt и I m гт При этом все решение на выходе интегратора 5 разбивается на ряд интервалов в общем случае неравной длительности. На каждом из этих интервалов решение формируется в соответствии с аппроксимальной моделью (6) или (7). Переход с одного интервала .аппроксимации на другой осуществляется с очень малой постоянной времени контура ,4, 5 и 2, определяемой большим коэффициентом усиления К интеграторов 5, Таким образом, решение интегрального уравнения (1) получается в виде кусочно-полиномиальной функции времени, В процессе решение интегрального уравнения (1) сигнал ошибки на выходе сумматора 1 не превьш1ает величины G, т.е. на выходе первого функционального преобразователя 2 входной сигнал отслеживается с ошибкой, не превышающей б, что соответствует уровню неопределенности входного сигнала. Имеет место предельный переход при отсутствии шумов во входном сигнале (j 0, коммутатор 4 все время находится в верхнем положении. устройство моделирует уравнение (3) и при достаточно малой j на выхое интегратора 5 образуется точное ешение интегрального уравнения Вольерра первого рода (1), При этом мо51278899
дель решения (блок 8) в схему не под- Формула ключается.
При наличии шума во входном сигнале ij О не имеет смысла . на выходе первого функционального преобразоват ля 2 отслеживать этот сигнал с точно стью, превьпиающей дисперсию П1ума,так как иначе этот шум (вследствие некорректности решаемой задачи) усиливается и может полностью подавить точное решение задачи. Поэтому устройство работает так, чтобы невязка на выходе сумматора 1 не превышала величины 3 - дисперсии шума входного сигнала. Иначе говоря, сигнал на выходе блока 2 (на выходе следящей системы) отличается от входного сигнала не более, чем на величину 6j т.е. эти сигналы совпадают с точностью до погрешности задания входного сигнала. При этом решение линейного интегрального уравнения Вольтерра первого рода на выходе интегратора 5 устойчивое и приближенное и не содер жит значительной высокочастотной шумовой составляющей. Обг ясняется это тем, что устройство начинает отрабатывать рассогласование только тогда, когда оно превышает величину шума входного сигнала, следовательно такое рассогласование действителыю имеет место относительнЪ входного сигнала, оно не является проявлением шума во входном сигнале. Отметим, что чем больше величина шума во входном сигнале, тем более приближенное решение интегрального уравнения получается при этом. При уменьшении погрешности во входном сигнале устойчивое решение интегрального уравнения стремится к точному. Параметры блока 8, т.е. коэффицирнты усиления масштабирующих блоков 10, 11 или 15 - 17 определяются anpk орно так, чтобы в среднем модель ап проксимировала все множество решений интегрального уравнения. Возможен случай, когда решение точно описыва ет&я априорно заданной моделью, кото рая реализована с помош,ью блока 8. Тогда устройство позволяет получить точное решение интегрального уравнения даже при наличии шума на входе
иэобретени
1, Устройство, для решения линейных интегральных уравнений по авт. св. № 926682, отличающе с я тем, что, с целью повьштения точности, оно содержит блок формирования модели решения, вход которого подключен к выходу интегратора, а выход соединен со вторым информационным входом коммутатора, причем блок формирования модели решения содержит интегратор, два масштабирующих узла и сумматор, причем вход блока формирования модели решения соединен с входом интегратора,выход которого соединен с входом первого масштабирующего узла, выход которого соединен с первым входом сумматора, выход которого соединен с выходом блока формирования модели решения, вход блока формирования модели решения подключен к входу второго масштабирующего узла, выход которого соединен с вторым входом сумматора. 2. Устройство для решения линейных интегральных уравнений по авт.св. № 926682, отличаю-, щ е е с я тем, что, с целью повышения точности.оно содержит блок формирования модел1 г решения, вход которого подключен к выходу интегратора, а выход соединен с вторым информационным входом коммутатора,причем блок формирования модели решения содержит интегратор, узел умножения, три масштабирующих узла и сумматор, причем вход блока формирования модели решения соединен с входом интегратора,, выход которого соединен с первым входом узла умножения, выход которого соединен с входом первого масштабирующего узпа, выход которого соединен с первым входом сумматора, выход которого соединен с выходом блока формирования модели решения, выход интегратора соединен с входом второго масштабируюше; о узла, выход которого соединен с вторым входом сумматора, вход блока формирования модели решения соединен с вторым входом блока умножания и входом третьего масштабирующего узла, выход которого соединен с третьим входом сумматора.
Фиг. 2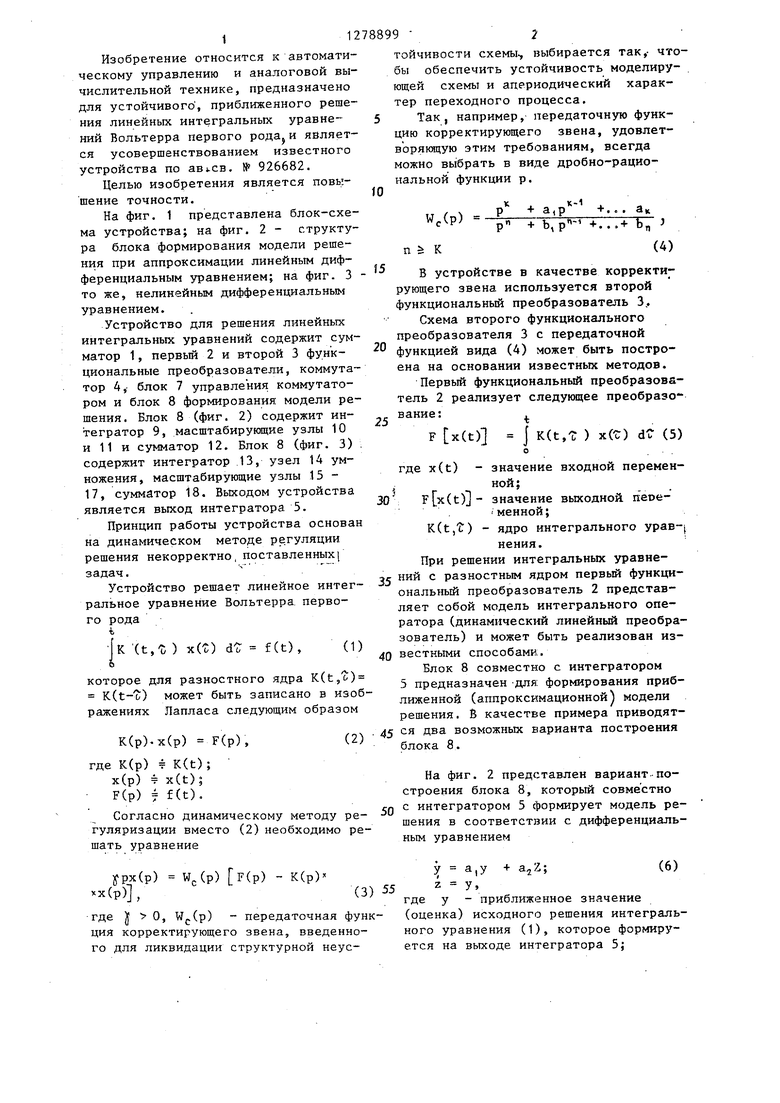

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для решения линейных интегральных уравнений | 1980 |
|
SU926682A1 |
| Дифференцирующее устройство | 1983 |
|
SU1101845A1 |
| Устройство для решения линейных интегральных уравнений Вольтерры | 1983 |
|
SU1124322A1 |
| Устройство для решения интегральных уравнений Вольтерра первого рода | 1989 |
|
SU1725236A1 |
| Устройство для моделирования трубопроводных систем | 1978 |
|
SU750520A1 |
| Устройство для решения интегральных уравнений | 1982 |
|
SU1092530A1 |
| Устройство для решения систем линейных алгебраических уравнений | 1985 |
|
SU1265810A1 |
| Устройство для определения кинетических коэффициентов биохимической реакции | 1982 |
|
SU1124343A1 |
| Устройство для решения уравнений в операторной форме | 1985 |
|
SU1328828A1 |
| Устройство для решения систем линейных алгебраических уравнений | 1984 |
|
SU1187157A1 |
Изобретение относится к автоматическому управлению и аналоговой вычислительной технике и предназначено для решения линейных интегральных уравнений : Вольтерра первого рода. изобретения - повышение точности. Устройство по первому варианту содержит сумматор, два функциональных преобразователя, коммутатор, интегратор, блок определения дисперсии шума входного сигнала, блок управления коммутатором и блок формирования модели решения, содержащий интегратор, узел умножения, три масштабирующих узла и сумматор. Указанные совокупности признаков позволяют достигнуть це(/ ли изобретения. 2 с.п. ф-лы, 3 ил.
- /5
Фиг.З
| Дифференцирующее устройство | 1983 |
|
SU1101845A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для решения линейных интегральных уравнений | 1980 |
|
SU926682A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
