Изобретение относится к автомати ке и вычислительной технике, в част ности к техническим средствам обуче ния, и может быть использовано, например, для подготовки технологичес кого персонала мартеновских цехов. Известен тренажер, содержащий блоки моделирования процессов и предъявления информации 13. Однако этот тренажер имеет ограниченную точность процесса обучения из-за отсутствия экономической оцен ки деятельности оператора. Наиболее близким к изобретению .является тренажер, предназначенный для обработки навыков управления теплойым и окислительным режимом мартеновской плавки в период довод; ки и содержащий последовательно со единенные блок моделирования мартеновского процесса и блок предъявления информации оператору. Блок моде лирования мартеновского процесса предназначен для имитации в тренажере объекта управления и содержит Связанные между собой динамические модели нагрева и обезуглероживания металла и модели ограничений по дав лению под сводом, температуре свода и дыма и содержанию кислорода в продуктах горения, представленные в виде функций основных управляющих воздействий (расходов вентиляторного компрессорного и инжектируемого воздуха, мазута, коксового и доменного газов, присадок руды и боксита). Этот блок может быть реализован на серийной аналоговой вычислительной машине среднего класса. Бло предьявления информации оператору предназначен для графической регист ращ1И и отображения информации о температуре и содержании углерода в металле, а также для сигналиэа цин о превышении предельно допустимых значений ограничивающих парамет ров мартеновской плавки и реалязован на серийных контрольно измерите приборах и сигнальной, аппаратур Контрольно-измерительные приборы подключены к блоку моделирования мартеновского процесса через делите -ли напряжений, а сигнальная аппаратура через последовательно соединенные пороговые элементы и ли мощности 23. Тренажер работает следующим обра зом. Перед началом моделирования с помощью реостатных задатчиков начальных условий, проградуированных в натуральных физических переменных, в модель вводят в виде напряжений начальные значения содержания углерода в металле, температуры металла, содержания окиси железа в шлаке и, исходя из их значений, а также конечных целей плавки, с помощью ре остатных задатчиков управлянщих воздействий задают требуемые расходы вентиляторного, компрессорного и инжектируемого воздуха, мазута, коксового и доменного газов. Затем осуществляется пуск тренажера (точнее, аналоговой вь1числительной машины, на которой реализована модель) и начинается моделирование, которое осуществляется в ускоренном времени. В соответствии с установленными уровнями управляющих воздействий модель выдает в виде напряжений информацию о текущем содержании углерода и температуре металла, которая поступает на контрольно-измерительные приборы блока представления ийформации оператору, также проградуированные в натуральных физических переменных, и регистрируется на них. Используя эту информацию, обучаемьй наблюдает за ходом процесса и в случае необходимости наносит управляющие воздействия так, чтобы достичь конечной цели плавки. При этом обучаемый следит, чтобы не были превышены предельные значения ограничивакшщх параметров, на что указьшает срабатывание соответствующих сигнализаторов в блоке предъявления информации оператору, В процессе моделирования тренажер может быть остановлен, а по окончании плавки возвращается в исходное положение, Путем многократного проигрывания плавки обучаемый добивается вьшолнения задания и закрепляет навыки его реализации. При этом возможен поиск оптимальных режимов ведения плавки с точки зрения какого-либо критерия, например минимального времени плавки или минимального расхода твердых окислителей. Однако вследствие сложности расчетов тем более в условиях ускоренного времени моделирования, в нем невозможно оперативно в темпе с процессом обученйд оценить качество управления каждой плавкой с экономической точки зрения, а значит, нельзя организовать эффективное обучение на основе этого критерия. Поэтому указанный тренажер не может обеспечить выработки оптимальных с эко- нрмической точки зрения навыков и умений управления мартеновской плавкой, что снижает точность обучения.
Цель изобретения - повышение точности обучения за счет использования экономической оценки качества веления плавки н обучения на основе этого критерия.
Указанная цель достигается тем, что В; тренажер, содержащий блок моделирования реальных процессов, соединенный с входами устройства и с блоком предъявления информации, узлы ввода учебной информации и индикатор, введены сумматоры, интеграторы и коммутатор, подключенньй непосредственно к индикатору, через последовательно включенные первьй интегратор и первьй сумматор - к входам устройства, через последовательно включен ные.второй и третий сумматоры и второй интегратор - к первому узлу ввода учебной, информации, причем первый интегратор соединен с вторым сумма- , тором, а второй узел ввода учебной информации подключен к третьему сумматору.; .... - - . . ; . . .; .
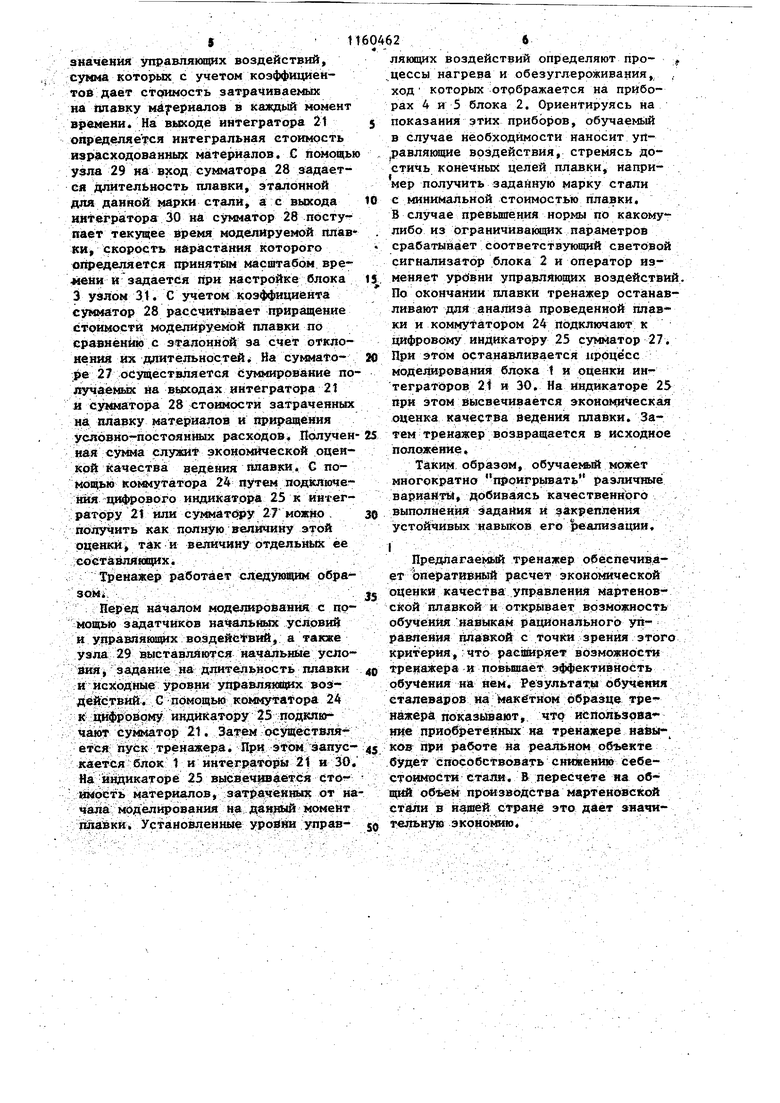
На чертеже схематически изображен тренаясер оператора энергетического объекта. .;.; . , : ;. : .
Тренажёр еодержит блок 1 моделирования рёальйьрс процессов, блок 2 предъявления ; информации и блок 3 экономической оценки качества ведения плавки. Блок 1 моделирования реалыалх процесеов реализован на аналогсвой вычислительной машине. Входы его связаны с реостатными задатч камИ основных управляющих воздействий (расходов вентиляторного, компрессорного и инжектируемого воздзгка,м4зута, коксового и доменного гаЗов, рудЫ и боксита), а также с заД4тчиками начальных условий (содержания углерода в металле, температуры металла, содержания окиси железа в шпаке), проградуированнымив натуральных физических переменш 1х, При,чем присадки руды и боксита вводятся в виде йнлульсов дпительностью 10 мин, пересчитываемых в модели . но определенным соотношениям скорости обезуглероживаний и охлаждения
металла. Выходами блокз 1 являются параметры содержания углерода и температуры металла, а также ограничивающие параметры мартеновской плавки, содержание кислорода в продуктах горения, температура дыма и свода И давления под сводом.
Блок 2 содержит два контрольноизмерительных Потенциометрических прибора 4 и 5 и четьфё световых сигнализатора 6-9. Входы приборов 4 и 5 подключены соответственно через делители 10 и 11 напряжений к выходам блока 1 по содержанию угдерода в металле и температуре металла. Шкалы приборов 4.и 5 проградуИрованы в натуральных физИческих переменньпс. Световые сигнализаторы 6-9 подключены соответственно через пороговые элементы 12-15 и усилители 16- j 9 мощности к входам блока 1 по ограничиваюнщм параметрам: содержанию кислорода в продуктах
g горения,, температуре дыма и свода И давлению под сводом,
Блок 3 экономической.оценки качества ведения плавки служит для расчета етсисмости затраченных иа плавку (доводку) материалов и условно-постоянных расходов, БЛОК 3 содержит сумматор 20,.входы которого соединень с задатчиками расхода мазута, коксового и доменного газой, руды, боксита, т.е. с задатчИками
тех материалов, стоимость которых значима, а выход через интегратор 21 в контакты 22 и 23 коммутатора 24 соединен с цифровым индикатоРОМ 25. К индикатору 25 через контакты 26 и 23 коммутатора 24 подключен также сумматор 27, входы которого
-соединены с вьжодами интегратора 21 и сумматора 28, Причем первый вход сумматора 23 подключен к уз лу 29 ввода учебной информации,
а второй через интег ратор 30 - к уззу 31 ввода учебной; информацш,
-С помощью сумматора 20 и иятеграто ра 21 рассчйтешаегся стоимость затра, ченных на плавку материалов а с п6МОЩЬ сумматора 28, узлов 29, 31 и интегратора 30 рабсчитьшается приращеиие стоимости плавки по сравне.)иию 5 эталонной за счет отклонения , длительности проведенной плавки от эталонной.V- -
В процессе моделирования на входы сумматора 20 поступают текущие
значёайяуправлякнцих воздействий, сумма которых с коэффициентов дает стоимость затрачиваемых на плавку мАуерналав в каждый момент вре1Фени. На выкоде иятегратрра 21 определяет ся интегральная етоимость израсходованмызс материалов. С помощь узла 29 на вход сумматора 28 задается длительность плавки, эталонной для данной марки стали, а с выхода интегратора 30 на сумматор 28 поступает текущее время моделируемой гшав ки, скорость нарастания которого отфеделяется принятым масштабом времени и задается при настройке блока 3 узлом 31. С учетом коэффициента сумматор 28 рассчитывает приращение стоимости моделируемой плавки по сравнению с эталонной эа счет отклонения их длительностей. На суьв аторе 27 осуществляется суммирование получаемых на выходах интегратора 21 я сумматора 28 стоимости затраченных на плавку материалов и приращения условно-постоянмдх расходов. Получен ная сумма служит экономической оденкой Качества ведения плавки. С помощью коьмутатора 24 путем подключения цифрового индикатора 25 к интегратору 21 или сумматору 27 можно . получить как полную неличину этой оценки, так и величину отдельнь1х ее составляющих.
Тренажер работает следующим образом.
Перед началом моделирования с помо1цью задатчиков начальных условий и управлясощих воздействий, а также узла 29 выставляются начальные услоаия, задание на длительность плавки и исходные уровни управлян1ф1х воздействий. С помощью коммутатора 24 к дйфроврму индикатору 25 подключают сумматор 21. Затем осуществляется пуск тренажера. При этом запускается блок 1 и интеграторы 21 и 30. На индикаторе 25 высвечивается стоимоеть материалов, затраченных от начала моделирования на дзняый момент плавки. Установленные уровни управляющих воздействий определяют процессы нагрера и обезуглероживания, ХОД которых отображается на приборах 4 и 5 блока 2. Ориентируясь на показания этих приборов, обучаемой в случае необходимости наносит yrt|равлякицие воздействия, стремясь достичь конечных целей плавки, например получить заданную марку стали с минимальной стоимостью пла;вки. В случае превьшгения нормы по какомулибо из ограничиваю(191х параметров срабатывает соответствующий световой сигнализатор блока 2 и оператор изменяет уровни управляющих воздействи По окончании плавки тренажер останавливают для анализа проведенной плавки и коммутатором 24 подключают к цифровому индикатору 25 сумматор 27. При этом останавливается 1фоцёсс моделирования блока 1 и оценки интеграторов 21 и 30. На Индикаторе 25 при этом высвечивается экономическая оценка качества ведения плавки. Затем тренажер возвращается в исходное положение
Таким образом, обучае1&1Й может многократно проигрывать различные варианты, добиваясь качественного выполнения задания и закрепления устойчивых навыков его реализации,
Предлагаемый тренажер обеспечивает оперативный расчет экономической оценки качества управления мартеновской плавкой и открывает возможность обучения навыкам рационального управления плавкой с точки зрения этого критерия, что расашряет возможности тренажера и повьшает эффективность обучения на нем. Результаты обучения сталеваров на Макетном образце тренажера показывают, что использова ние приобретенных на тренажере навыков при работе на реальном объекте будет способствовать снижению себестоимости стали. В пересчете на общий объем производства мартеновской стали в нашей стране это дает значительную экономию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер оператора мартеновскойпЕчи | 1979 |
|
SU796903A1 |
| Тренажер оператора энергоемких процессов | 1981 |
|
SU1043720A1 |
| Тренажер оператора кислородного конвертера | 1983 |
|
SU1088055A1 |
| Обучающее устройство | 1984 |
|
SU1249566A1 |
| Тренажер водителя погрузчика | 1984 |
|
SU1163344A1 |
| Тренажер профессиональной подготовки оператора гусеничной машины | 2022 |
|
RU2798765C1 |
| Тренажер операторов автоматизированных систем управления | 1981 |
|
SU991482A1 |
| Тренажер оператора автоматизированных систем управления | 1982 |
|
SU1132302A1 |
| Тренажер оператора грузоподъемных машин | 1982 |
|
SU1081645A1 |
| Тренажер оператора систем управления | 1988 |
|
SU1536426A1 |
ТРЕНАЖЕР ОПЕРАТОРА ЭНЕРГЕТИЧЕСКОГО ОБЪЕКТА, содержащий блок .моделирования реальных процессов, соединенный с входам устройства и с блоком предъявления информации, узлы ввода учебной информа1щи и индикатор, отличающийся тем, что с цель повышения точности , ои сумматоры, инTerpa-tcffiiJ я коммутатор, под:уавочейный иеязсредственно к иедикатору, через последовательно включеншда первый интегратор и первь сумматор - к fixoдам устройства, через последовательно вкл)9Ченные второй и третий суммато ры и второй интегратор - к перво с уэлу ввода учебной информации, (Л причем первый интегратор соединен с с вторьш cyieiaTopoM, а второй узел ввода учебной информацией подключен к третьему сумматору.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Тренажер для обучения операторов систем управления | 1973 |
|
SU449364A1 |
| Йоследовательная ийентнфикащ«я оеновньпс процессов мартеновской плавки методом подстраиваемой модели: Дне | |||
| на соиск | |||
| учен, степени техн.наук Новокузнецк, 1975, с, 125-127 (прототпп). | |||
