Изобретение относится к шахтному подъему и может быть использовано для управления приводом тормоза шахтных подъемных машин и лебедок.
Целью изобретения является повышение надежности управления шахтной подъемной машиной за счет уменьшения динамических нагрузок в переходных режимах.
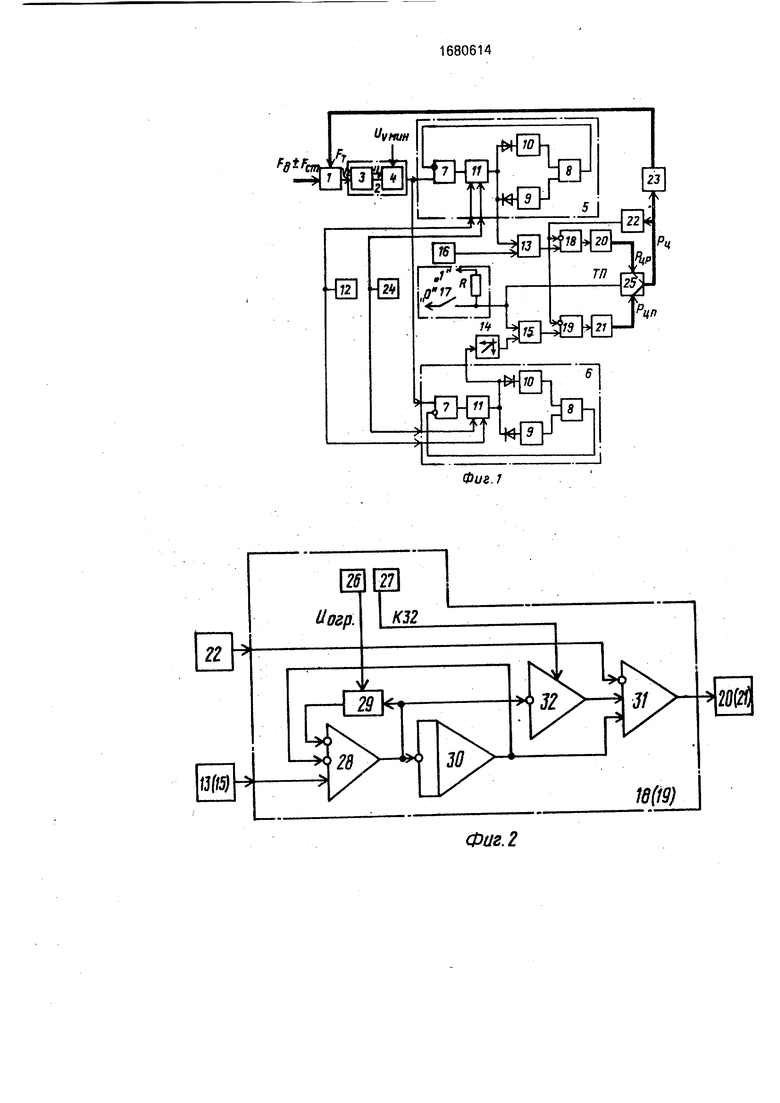
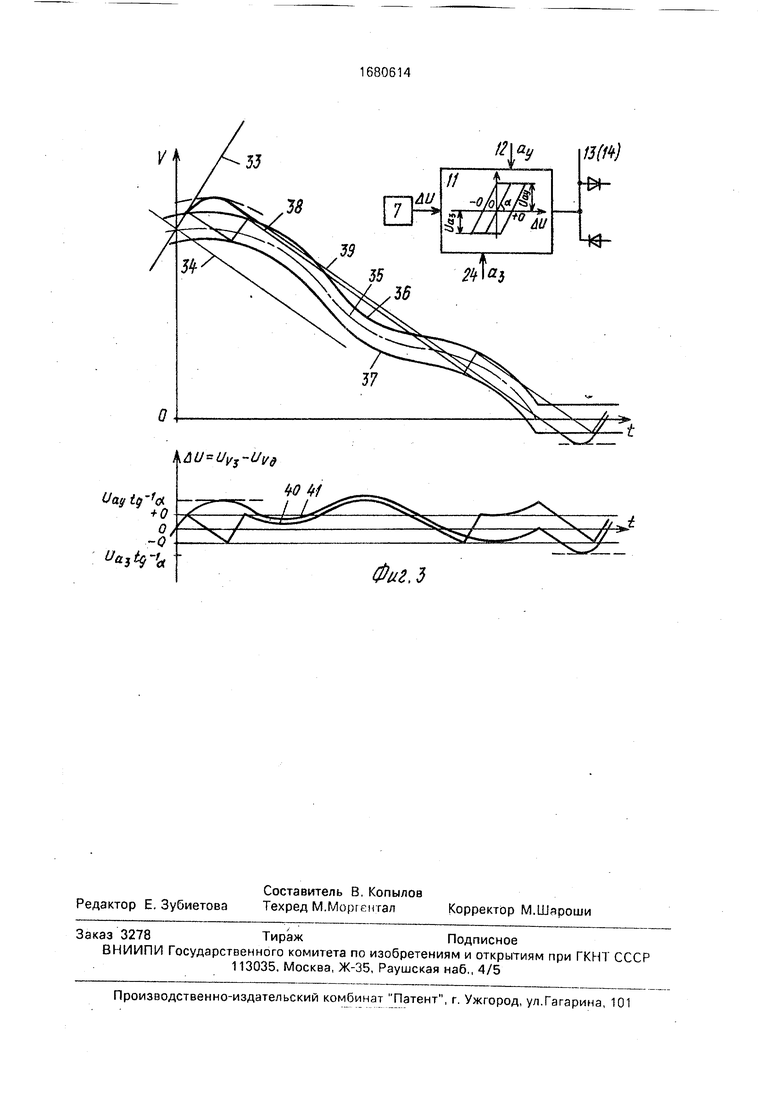
На фиг.1 приведена функциональная схема устройства; на фиг.2 - функциональная схема формирователя сигналов управления; на фиг.З -диаграммы изменения во времени действительной и заданной скорости подъемной машины.
Устройство (фиг.1) содержит подъемную машину 1, соединенную с датчиком 2 скорости, состоящим из измерителя-преобразователя 3 скорость-напряжения и выходного
усилителя 4 с зоной нечувствительности. Выход датчика 2 подключен к регуляторам 5 и 6 рабочего и предохранительного торможения. Регуляторы 5 и 6 состоят из элементов 7 сравнения, прямые входы которых соединены с выходом датчика 2, а инверсные входы - с. выходами элементов & сумми- рования, Одни входы элементов 8 суммирования регуляторов 5 и 6 подключены к соответствующим выходам блоков 9 формирования законов снижения скорости во времени, а вторые - к соответствующим выходам блоков 10 формирования законов нарастания скорости во времени Выходы элементов 7 сравнения соединены с одними входами усилителей-ограничителей 11, вторые входы которых и соответствующих регуляторов 5 и 6 подключены к сдатчику 12 максимально возможного ускорения (ay), а выходы через диоды подключены соответст- венно к входам блоков 10 и 9 формирования законов нарастания ч снижения скорости во времени. Выход усилителя-офаничителя 11 регулятора 5 соединен непосредственно с вторым входом первого сумматора 13, а выход усилителя-ограничителя 11 регулятора 6 через нелинейный элемент 14 - с первым входом второго сумматора 15. Другой вход сумматора 13 подключен к выходу блока 16 ручного управления тормозом, а сум- матора 15 - к контакту 17 реле предохранительного торможения. Выходы сумматоров 13 и 15 соединены через формирователи 18 и 19 сигналов управления к входам соответствующих приводов 20 и 21 рабочего и предохранительного торможения, представляющих собой электромеха нические преобразователи, например ток-давление
Источник давления и связь со сливным баком на схеме условно не показана
Управляющие входы формирователей 18 и 19 сигналов управления подключены к выходу датчика 22 давления рабочего тела в тормозном цилиндре, механического тор- моза 23. Третьи входы регуляторов 5 и 6 соединены с выходом задатчика 24 заданного замедления подъемной машины.
Выходы приводов рабочего 20 и предохранительного 21 торможения подключены к входам электромеханического переклю- чателя 25, управляющий вход которого подключен к контакту 17 реле предохранительного торможения, а выход- к тормозному цилиндру механического тормоза 23, воздействующего на подъемную машину 1.
Блоки 10 регуляторов рабочего 5 и предохранительного 6 торможения формируют законы нарастания скорости во времени при наличии сигналов с выходов усилителей-ограничителей 11ч ;фез диоды, соответствующих 0, где Vg - величина действительной скорости; Уз - величина заданной скорости
Блоки 9 регуляторов рабочего 5 и предохранительного 6 торможения формируют законы снижения скорости во времени при наличии сигналов с выходов усилителей-ограничителей 11 через диоды соответствующих Vg-Vs 0.
Формирователи 18 и 19 сигналов управления (фиг.2) состоят из задатчиков 26 и 27 сумматора 28, в цепи отрицательной обратной связи которого включен ограничитель 29, интегратора 30 и выходного усилителя 31, к второму входу которого подключен через масштабирующий усилитель 32 выход сумматора 28. Причем второй инверсный вход сумматора 28 подключен к выходу интегратора 30. Прямой вход сумматора 28 является входом формирователя 18 и 19, а инверсный вход выходного усилителя 31 является управляющим входом формирователей 18 и 19.
Статический коэффициент передачи сумматоров 28 равен 1, а коэффициент передачи интеграторов 30 выбирается таким, чтобы выходной сигнал охваченных отрицательной обратной связью сумматоров 28 и интеграторов 30 повторял сигнал на прямых входах сумматоров с минимальным запаздыванием, Т.е. Кзо сигнал на выходе сумматора 28, который будет появляться в моменты изменения сигналов на прямом входе сумматора 28, усиливается масштабирующим усилителем 32 и поступает на прямой вход выходного усилителя 31, на второй прямой вход которого поступают сигналы с выхода интегратора 30. Коэффициент передачи масштабирующего усилителя 32 определяется постоянной времени исполнительного механизма, а также коэффициентом передачи интегратора 30. Таким образом, коэффициент усиления масштабирующего усилителя 32 равен:
То,
где Кзо - коэффициент передачи интегратора 30,
Т0 - суммарная постоянная времени привода 20 (21), электромеханического переключателя 26, тормоза 23 с учетом влияния отрицательной обратной связи с датчика 22 давления на усилитель 31, С
Ограничители 29 предназначены для улучшения помехоустойчивости формирователей 18 и 19.
Коэффициент передачи выходного усилителя 31 определяется общим коэффициентом передачи контура давления и
допустимой статической ошибкой регулирования замедления.
Работа регуляторов рабочего 5 и предохранительного 6 торможения при разорван- ных связях выходов регуляторов на сумматор 13 и элемент 14 иллюстрируются на фиг.З, где 33 - законы нарастания скорости во времени; 34 - законы снижения скорости во времени; 35-37 - траектория изменения действительной скорости, Vg (условно увеличена).
38- траектория заданной скорости УЗ при
39- траектория заданной скорости Уз приа 90°
40- рассогласование скоростей Vg при
41- рассогласования скоростей Удпри« 90°,
где a arctgK, К - коэффициент усиления блока 11 (фиг,11).
С блока 16 ручного управления тормозом формируется сигнал, пропорциональный углу поворота рукоятки управления. Система управления приводом тормоза работает в двух режимах: управление рабочим тормозом от рукоятки командоаппарата 16 или управление предохранительным торможением при срабатывании контакта 17, управляющего электромеханическим переключателем 26, подключающим к тормозному цилиндру тормоза 23 выход соответствующего привода 0 или 21.
При срабатывании цепи защиты контакт 17 размыкается и на вход сумматора 15 поступает сигнал 1, стремящийся затормозить подъемную машину 1. Если, при этом, с выхода регулятора 6 через элемент 14 нет сигнала, то замедление подъемной машины 1 увеличивается и приводит к тому, что действительная скорость подъемной машины 1 становится меньше заданной по закону снижения формируемой регулятором 6, и с выхода регулятора 6 через элемент 14 на сумматор 15 поступает сигнал, стремящийся растормозить 6 подъемную машину 1. Элемент 14 необходим для выделения отрицательного сигнала. Рассогласование этих сигналов поступает на прямой вход формирователя 19 Он формирует сигнал на привод 21, а через него - на тормозной цилиндр и тормоз 23, который тормозным усилителем FT воздействует нз подъемную машину 1, меняя замедление ее, а следовательно, и закон изменения скорости до заданного регулятором 6 закона снижения, после чего с выхода регулятора 6 появляется отрицательный сигнал, стремящийся компенсировать сигнал 1 появившийся в
момент разрыва контакта 17. Сигнал с регулятора 5 увеличивается до тех пор, пока суммарным сигнал с сумматора 15 не уменьшится до величины при которой тормозное усилие FT станет таким, что действительная скорость будет изменяться по закону снижения. Изменение коэффициента трения тормозных колодок ипи нагрузки в процессе торможения будет приводить к соответству0 гощему подрегулированию FT. Причем, так как быстродействие тормоза ограничено постоянными времени (в основном механическими), го для исключения динамических перегрузок в процессе регулирования при
5 требуемом быстродействии, т.е. исключение больших перерегулирований тормозного усипия и колебательного характера переходного процесса замкнутой системы регулирования необходимо изменение тор0 мозного усилия FT формировать с учетом суммарной постоянной времени входящих в систему исполнительных механизмов (блоки 21,20,23,27).
Для этого формирователь 19 формирует
5 сигнал управления, соответствующий рассогласованию заданной и действительной скоростей и сигнал, компенсирующий темп изменения рассогласования с соответствующий знаком. Коэффициенты передачи
0 сигналов определяются суммарной постоянной времени исполнительных механизмов : необходимой точностью. Кроме этого, для снижения влияния постоянных времени на характер процесса регулирования и по5 вышения точности блоки 19-21-26 охвачены отрицательной обратной связью по давлению. Это позволяет снизить постоянную времени привода 21, имеющего существенное значение, так как в нем
0 происходит преобразование электрического сигнала в давление рабочего тела в тормозном цилиндре тормоза 23. Датчик 22 давления рабочего тела в тормозном цилиндре тормоза 23 подключен выходом к управ5 ляющему входам формирователей 18 и 19. Наличие в регуляторе 6 усилителя-ограничителя 11 позволяет формировать заданную скорость путем плавного перехода с закона снижения на закон нарастания и наоборот,
0 так как наличие в блоке 11 линейного учэст- ка характеристики не даст возможности резкого переключения, уменьшит частоту переходов и таким образом улучшит помехоустойчивость системы.
5При снижении скорости подъемной машчиы I до некоторой минимальной, при ко- тооой динамические перегрузки не опасны, сигнал с усилителя 4 с зоной нечувствительности становится равным нулю рС1улятор 6 перестает работать На его выходе CHI чал
отсутствует и подъемная машина 1 тормозится полным тормозным усилием.
Таким образом, наличие блоков 10,14,15,19,22 позволяет повысить безопасность работы системы управления путем уменьшения динамических нагрузок в переходных режимах.
Аналогично работает система в режиме управления рабочим торможением. Здесь роль сигнала цепи защиты выполняет ко- мандоаппарат 16. При неправильных действиях машиниста вступает в действие регулятор 5, и через сумматор 13 - формирователь 18,
Формула изобретения
1. Устройство для управления приводом тормоза шахтной подъемной машины, содержащее механический тормоз, воздействующий на подъемную машину, с которой соединен датчик скорости, выход которого соединен с первыми входами регуляторов рабочего и предохранительного торможения, выход последнего через нелинейный элемент соединен с первым входом второго сумматора, второй вход которого соединен с контактом реле предохранительного торможения и управляющим входом электромеханического переключателя, первый и второй входы которого соединены соответственно с выходом приводов рабочего и предохранительного торможения, а выход - с механическим тормозом, блок ручного управления тормозом, выход которого соединен с первым входом первого сумматора, выходы задатчиков максимально возможного ускорения и заданного замедления подъемной машины соединены соответственно
со вторыми и третьими входами регуляторов рабочего и предохранительного торможения, отличающееся тем, что, с целью повышения надежности управления за счет
уменьшения динамических нагрузок в переходных режимах, в него введены датчик давления рабочего тела в тормозных цилиндрах механического тормоза, первый и второй формирователи сигналов управления, входы которых соединены соответственно с выходами первого и второго сумматоров, управляющие входы - с выходом датчика давления рабочего тела, а выходы - с входами приводов рабочего и предохранительного торможения соответственно, выход регулятора рабочего торможения соединен с вторым входом первого сумматора,
2, Устройство поп.1,отличающее- с я тем, что каждый формирователь сигналов управления содержит два задатчика, сумматор, ограничитель, интегратор, масштабирующий и выходной усилители, причем прямой вход сумматора является входом формирователя, а выход через интегратор
соединен с первым прямым входом выходного усилителя, выход которого является выходом формирователя, а инверсный вход - управляющим входом формирователя, выход сумматора через ограничитель соединен с первым инверсным входом сумматора, второй инверсный вход которого соединен с выходом интегратора, выход сумматора через масштабирующий усилитель соединен с вторым прямым входом выходного усилителя, выходы первого и второго задатчиков соединены соответственно с входами задания напряжения ограничения ограничителя и коэффициента усиления масштабирующего усилителя.
I
N
о
Т
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом шахтной подъемной машины | 1987 |
|
SU1447743A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| Устройство для управления приводом шахтной подъемной машины | 1985 |
|
SU1296500A1 |
| Устройство для управления предохранительным торможением подъемной установки | 1975 |
|
SU753761A1 |
| Способ управления предохранительным торможением шахтной подъемной машины и устройство для его осуществления | 1988 |
|
SU1640093A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1985 |
|
SU1306871A2 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1988 |
|
SU1652267A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1985 |
|
SU1379216A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
Изобретение относится к технике управления шахтным подъемом, может быть использовано для управления тормозом шахтных подъемных машин и лебедок. Цель изобретения - повышение надежности управления за счетуменьшения динамических нагрузок в переходных режимах. Устройство содержит датчик 2 скорости, регуляторы (Р) 5 и 6 рабочего и предохранительного торможения, механический тормоз 23 с тормозными цилиндрами, задатчика максимально возможного ускорения 12 и задания замедления 24, блок 16 ручного управления тормозом, сумматоры 13 и 15, нелинейный элемент 14, контакт 17 реле предохранительного торможения, электромеханический переключатель {ЭМП) 25. Дополнительно в устройство введены датчик 22 давления рабочего тела в тормозных цилиндрах тормоза 23 и два формирователя сигналов управления (ФСУ) 18 и 19. Сдатчика 2 сигнал поступает на Р 5 и 6, в которых обрабатывается в зависимости от соотношения с сигналами задатчиков 12 и 24. В режиме рабочего торможения контакт17 замкнут. Поэтому управление тормозом 23 идет от Р 5 и блока 16 через сумматор 13, ФСУ 18, привод 20, ЭМП 25 и тормоз 23. В режиме предохранительного торможения контакт 17 разомкнут, что обеспечивает переключение ЭМП 25. Управление тормозом 23 происходит от Р 6 через элемент 14, сумматор 15, ФСУ 19, привод 21, ЭМП 25 и тормоз 23. При этом ФСУ 18 и 19 в зависимости от давления рабочего тела в цилиндрах, измеряемого датчиком 22, формируют сигналы управления, позволяющие компенсировать темп изменения рассогласования заданной и действительной скоростей с соответствующим знаком. 1 з.п. ф-лы, 3 ил. С/ с о 00 о Os
Фиг.З
| Устройство для управления приводом шахтной подъемной машины | 1985 |
|
SU1296500A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Авторское свидетельство СССР № 14477743,кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
