4; сд to
О1
Изобретение относится к судостроению, в частности к устройствам для слределения посадки судна.
Цель изобретения -.повышение эф- фективности использования устройства Путем расширения его функциональных Возможностей. .
На фиг.1 представлены два шпанго- утных сечения судна, одно из. которых носовое, другое - кормовое, каждое ; левым и правым электрическими датчиками уровня погружения, которые на иыходе дают сигнал, пропорциональный длине смоченной части периметра се- чения, а также указаны используемые и определяемые величины, аксономет- )ия; на фиг.2 - схема устройства; на (иг.З - схема первого, (второго) решающего устройства; на фиг.4 - схема третьего решающего устройства. ; Устройство содержит датчики 1, 2 II 3, 4 для измерения длины смоченной левой и правой частей носового и корг мового шпангоутного сечения, соответ:твенно 1„д, 1 нп и 1«л и 1.ц„, первое - третье электронные решающие устройства 5-7, блок 8 статистической обработки данных и блок 9 пре,цставле- ния информации, при этом первое и второе решающие устройства с одержат два преобразователя 10 и 11, к входам которых подключены перв ый, второй и третий блоки 12-14 нелинейных функций выходы первого 12 и третьего 14 бло- ков при этом через первый и второй сумматоры 15 и 16 подключены к первому и третьему выходу, а выход второго блока 13 нелинейных функций подсоединен ,с второму выходу первого (второго) решаьзщего устройства 5(6). I Первый, и второй входы третьего решающего устройства 7 через первьш Щлок 17 перемножителя-определителя арктангенса угла соединены с первым выходом этого решающего устройства 7, а его третий и четвертый входы через третий сумматор 18, второй блок.19 перемножителя-определителя арктангенса угла соединены с вторым выходом, а через четвертый сумматор 20 и.блок 21 перемножения - с третьи выходом, при этом его пятый и шестой входы через третий блок 22 пёремно- жителя-определителя тангенса угла соединены с четвертым выходом -третье го решающего устройства 7, входы кот торого соединены с выходами первого и второго решающих устройств 5 и 6,
о 5
5
а вьпсоды которого соединены с входами блока 8 статистической обработки данных, выходы которого соединены с входами блока 9 представления информации ,
Устройство работает следующим образом.
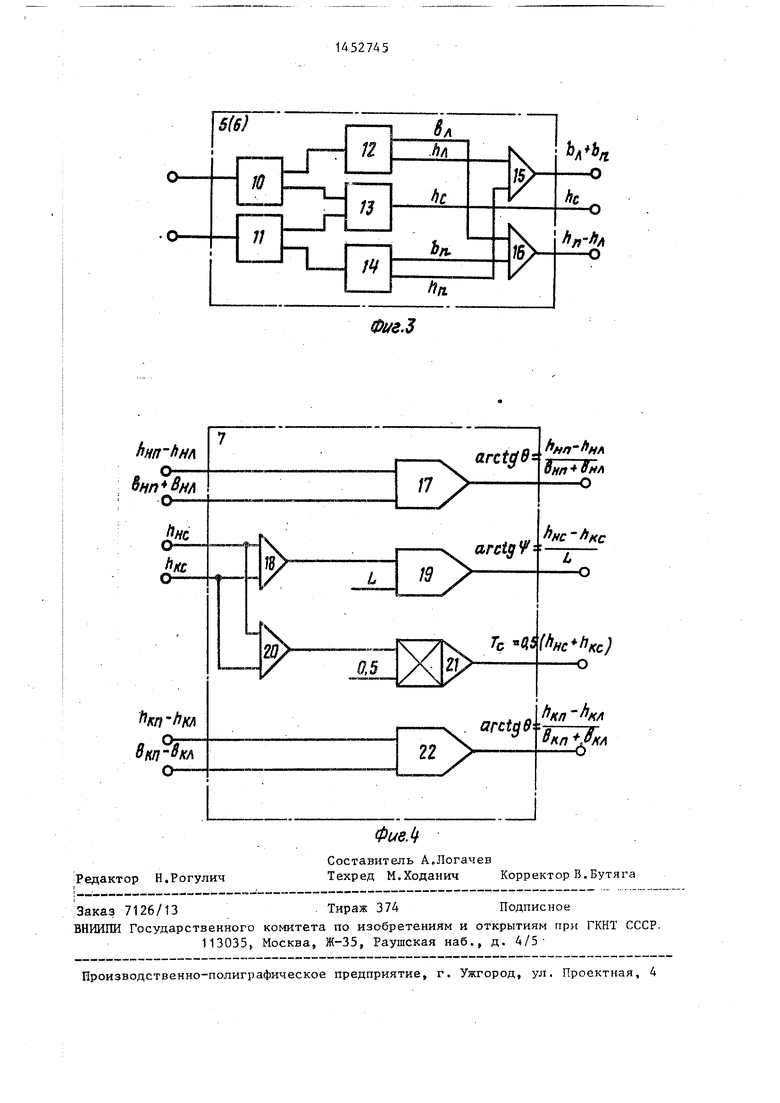
Сигналы, выработанные датчиками 1-4, пропордаональные. длинам частей периметра носового и кормового пшан- гоутного сечения судна, смоченных по ватерлинии WIj „. и WL - мх ип 1цд и 1 ко поступают на преобразователи 10 и 11 первого и второго решающего, устройства 5 и 6, а далее с их выходов - на входы трех блоков 12-14 нелинейности, где.формируются сигналы нелинейных функций Ь,нл- ,(1,ц), Ьцл ) Ьнс -э(1нл 1«п) Ьип f4a«n) Ь„, .Ho) у первого решающего устройства 5 и b,ц,(,i,,; ,
Ьц 7(1), Ьц. f(lhA. Hrt) Ькп э(1кп.кл fio(l.n.) У втбро- го решающего.устройства 6. С выхода ;второго блока 13 нелинейности на второй выход первого решающего устройства 5 поступает сигнал h цс , а на второй выход второго решающего устройства 6 сигнал Ьцс С выходов первого и третьего блоков 12 и 14 нелинейных функций, сигналы, пройдя через первый и второй сумматоры 15 и 16, преобразуются в сигналы, пропорциональные величинам (Ь цд+ b „„) , (h НА) У первого решающего устройства 5 и (Ь if,+ Ъ 1) , (h цр- ) у второго решающего устройства 6 на первом и третьем их выходе. В третьем решающем устройстве 7 сигналы, пропорциональные (Ьцп Ьцд) и (Ь нп+Ь НА) проходят через первый блок 17 перемножителя-определителя арктангенса угла и на первом выходе устройства 7 формируется сигнал, пропорциональньй арктангенсу угла крена 0arctg 6 (Ьц,- )( Ъцд). Аналогично на четвертом выходе решающего устройства 7 формируется сигнал, пропорцио-; нальный арктангенсу угла крена б, замеренного в кормовом шпангоутном
сечении - arctg & (h кд) t Сигналы, пропорциональные h ц и h j, проходят через третий сумматор 18 и второй блок 19 перемножителя-определителя арктангенса угла, на второй вход которого поступает сигнал, пропорциональньй расстоянию между шпангоут ными сечениями L, при этом на
втором выходе решающего устройства 7 формируется сигнал, пропорциональньш арктангенсу угла дифферента v-arctgV (h.,., - h,,..)/L. Эти же сигналы h
If с
kc
НС
.. проходят через четвертьш сумматор 20 и блок 2|, перемножения, на второй вход которого поступает сигнал пропорциональный величине 0,5, при этом на третьем выходе устройства 7 формируется сигнал, соответствующий среднему значению осадки Тс - Тс (Ь„с+ hke)-0,5.
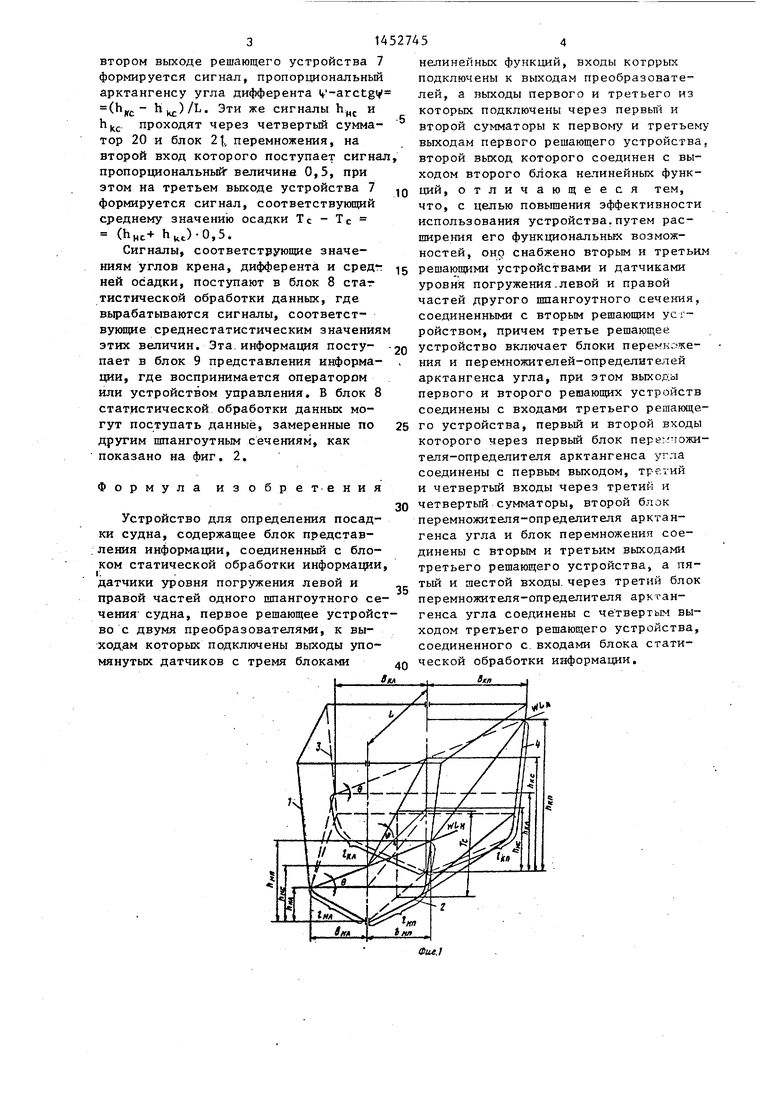
Сигналы, соответствующие значениям углов крена, дифферента и средт ней осадки, поступают в блок 8 стат тистической обработки данных, где вырабатываются сигналы, соответствующие среднестатистическим значениям этих величин. Эта,информация посту- пает в блок 9 представления информации, где воспринимается оператором или устройством управления. В блок 8 статистической обработки данных могут поступать данные, замеренные по другим шпангоутным сечениям, как показано на фиг, 2.
Формула изобретения
Устройство для определения посадки судна, содержащее блок представления информации, соединенный с блоком статической обработки информации,
датчики уровня погружения левой и правой частей одного пшангоутного сечения судна, первое решающее устройство с двумя преобразователями, к выходам которых подключены выходы упомянутых датчиков с тремя блоками
0
15
Q
25
0
35
0
нелинейных функций, входы котррых подключены к выходам преобразователей, а выходы первого и третьего из которых подключены через первьш и второй сумматоры к nepBONry и третьему выходам первого решающего устройства, второй выход которого соединен с выходом второго блока нелинейных функций, отличающееся тем, что, с целью повышения эффективности использования устройства.путем расширения его функциональных возможностей, ОН9 снабжено вторым и третьим решающими устройствами и датчиками уровня погружения.левой и правой частей другого шпангоутного сечения, соединенными с вторым решающим усг-- ройством, причем третье решающее устройство включает блоки перемножения и перемножителей-определитапей арктангенса угла, при этом выхор;ы первого и второго решающих устройств соединены с входами третьего решающего устройства, первый и второй входы которого через первый блок пере-ггожи- теля-определителя арктангенса угла соединены с первым выходом, третий и четвертый входы через третий и четвертый сумматоры, второй блок перемножигеля-определителя арктангенса угла и блок перемножения соединены с вторым и третьим выходами третьего решающего устройства, а пятый и шестой входы, через третий блок перемножителя-определителя арктангенса угла соединены с четвертым выходом третьего решающего устройства, соединенного с. входами блока статической обработки информации, Jw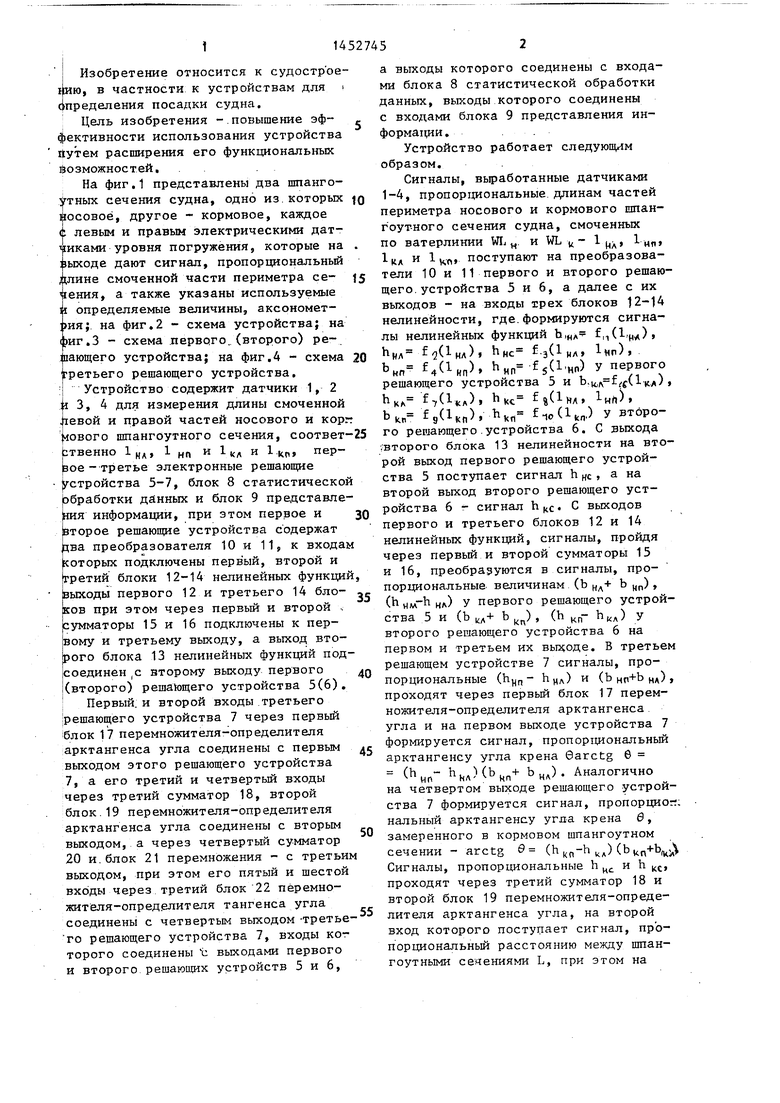
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор Грудина для определения крена судна | 1983 |
|
SU1121175A1 |
| Устройство для измерения заполненного водой объема помещения судна | 1987 |
|
SU1571404A1 |
| Прибор Грудина для измерения объема затопляемого помещения судна | 1983 |
|
SU1104359A1 |
| Способ определения разности фаз СВЧ-сигналов и устройство для его осуществления | 1987 |
|
SU1465808A1 |
| Способ измерения амплитуды сигнала | 1986 |
|
SU1465786A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВАРИАЦИЙ ФАЗОВОГО СДВИГА ЦЕНТРАЛЬНОЙ ЧАСТОТЫ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2524673C1 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| ИЗМЕРИТЕЛЬ ФАЗЫ СИГНАЛОВ | 1989 |
|
RU2024883C1 |
| УСТРОЙСТВО ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ | 2007 |
|
RU2334357C1 |
| ИЗМЕРИТЕЛЬ РАЗНОСТИ ФАЗ РАДИОСИГНАЛОВ | 2009 |
|
RU2388001C1 |
Изобретение относится к судостроению, в частности к устройствам для определения посадки судна. Цель изобретения - повышение эффективности использования устройства путем . расширения его функциональных возможностей. Устройство содержит датчики 1-4 уровня погружения левой и правой частей шпангоутных сечений, соединенные с первым и вторым решающими устройствами 5, 6, при этом выходы первого и второго решающих устройств соединены с входами третьего решающего устройства 7, первый и второй входы которого через первьй блок перемножителя-определителя арктангенса угла соединены с первым вьшодом, третий и четвертый входы через третий и четвертый сумматоры, второй блок перемножителя-определителя арктангенса угла и блок перемножения соединены с вторым и третьим выходом, пятый и шестой входы через третий блок перемножителя-определителя арктангенса угла соединены с четвертым выходом третьего решающего устройства, соединенного с входами блока 8 статистической обработки информации, выходы которого соединены с входами блока 9 представления информации. 4 ил. S сл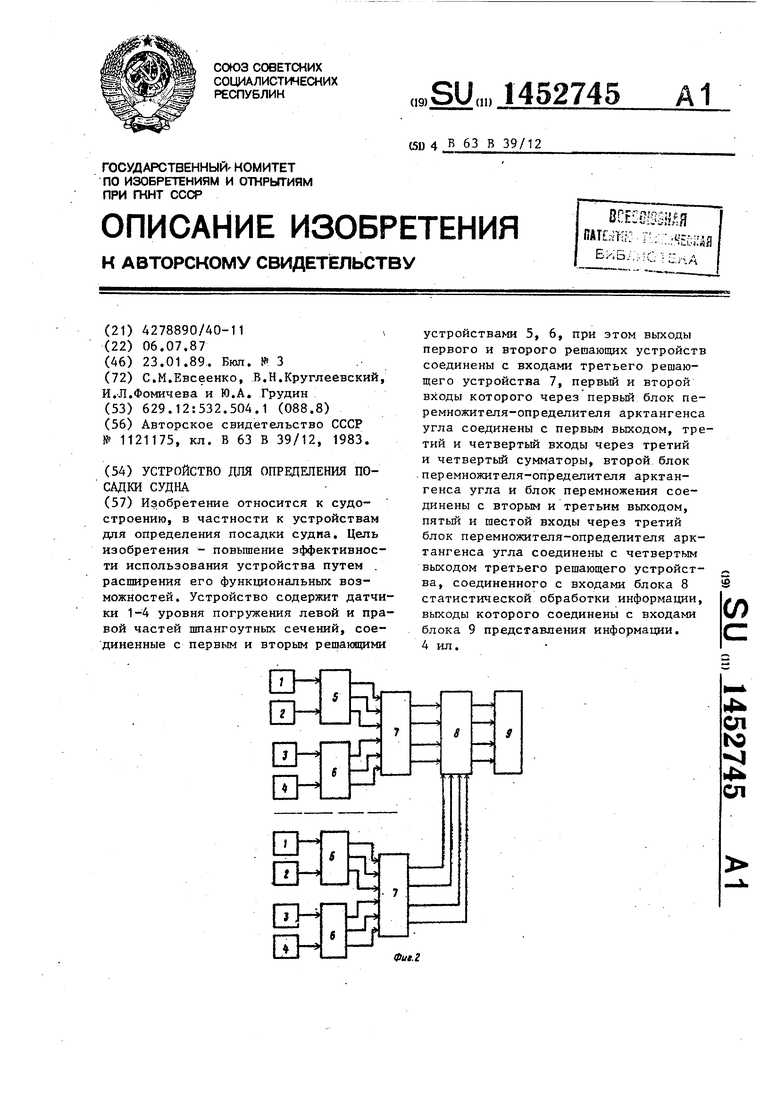
| Прибор Грудина для определения крена судна | 1983 |
|
SU1121175A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
