Изобретение относится к судостроению, в частности к устройствам для определения положения и устойчивости (осадки, крена) судна, и может быть использовано для измерения заполненного водой объема помещения или отсека судна.
Цель изобретения - повышение точности измерения и расширение области использования устройства.
На фиг.1 изображено судовое помещение с неодинаковыми носовым и кормовым шпангоутными сечениями, каждое с левым и правым электрическими датчиками для измерения длины смоченной части периметра сечения, с указанием используемых и определяемых величин, соответствующих двум случаям заполнения помещения водой, отличающийся знаком дифферента ( + у или - ц ),аксонометрия; на фиг.2 - предлагаемое .
устройство, общий вид; на фиг.З - фиг.6 - схемы первого, второго, третьего, четвертого и пятого решающих устройстп соответственно; на фиг.7 - фиг,10 - схемы других блоков устройства. Устройство размещено в судовом помещении (0НАН0 КВКВН0И) 1, имеющем . носовое (0НАНВН0Н) 2 и кормовое (0КАКВК0К) 3 шпангоутные сечения, по периметру которых размещены носовой левый (0НАНБМ) 4 и правый (0НВНБН) 5, кормовый левый (0КАКБК) 6 и правый (0КВКБК) 7 датчики для измерения длины смоченной части шпангоутного сечения.
На фиг.1 (и в дальнейшем) определяемые и используемые величины, а также их координаты в пространстве обозначаются с нижними и верхними индексами, причем в двух различных
сп j
-Сь Ј
представленных случаях заполнения водой помещения 1 одни и те же величины и координаты обозначаются с верхним штрихом, если эта величина и соответствующая ей координата меньшая, и двумя штрихами, если большая. В одном случае -объем V заполненной водой, части помещения 1 равен объему 8 (фигуры Ј0КДЈД Н0Н) , что соответствует крену на правый борт (положительному крену или -,- 9) и дифференту на нос (положительному дифференту или +v). В другом представленном случае объем V равен объему 9 (фигуры ), что соответствует, положительному крену и отрицательному дифференту судна (0 и - f )..Указанные объемы состоят из объема VgpЈx верхней усечен- ной треугольной пирамиды Д Еи3 зЈдЈЕ с носовым основанием -Ю (треугольник Е1Д«3ы с площадью Stf) и кормовым
я II If
основанием 11 (треугольник ЕКД(3К с площадью S/j) при 0 и -f v или с носовым основанием 12 (треугольник с площадью S Jj ) и кормовым основанием S3 (треугольни Е Д кЗк с площадью S) при +0 и -у, объема V Л| усеченной треугольной призмы с перпендикулярным ребрам сечением 14 (треугольник Ж«жЈж| с площадью Q) при +9 и / у или E{,E 3jj3 H3 kE K с перпендикулярным ребрам сечением 15 (треугольник с площадью Q) при +0 и - ц ,
ЦП
и объема Униэ нижней усеченной пирамиды ,0 к, которая имеет объем, соответствующий объему всей затопленной части помещения при & - Ф 0,носовое основание 16 ( с площадью ) и кормово основание 17 (OkE S K0K с площадью S ниа) ПРИ любых значениях 0 и ц/ ,
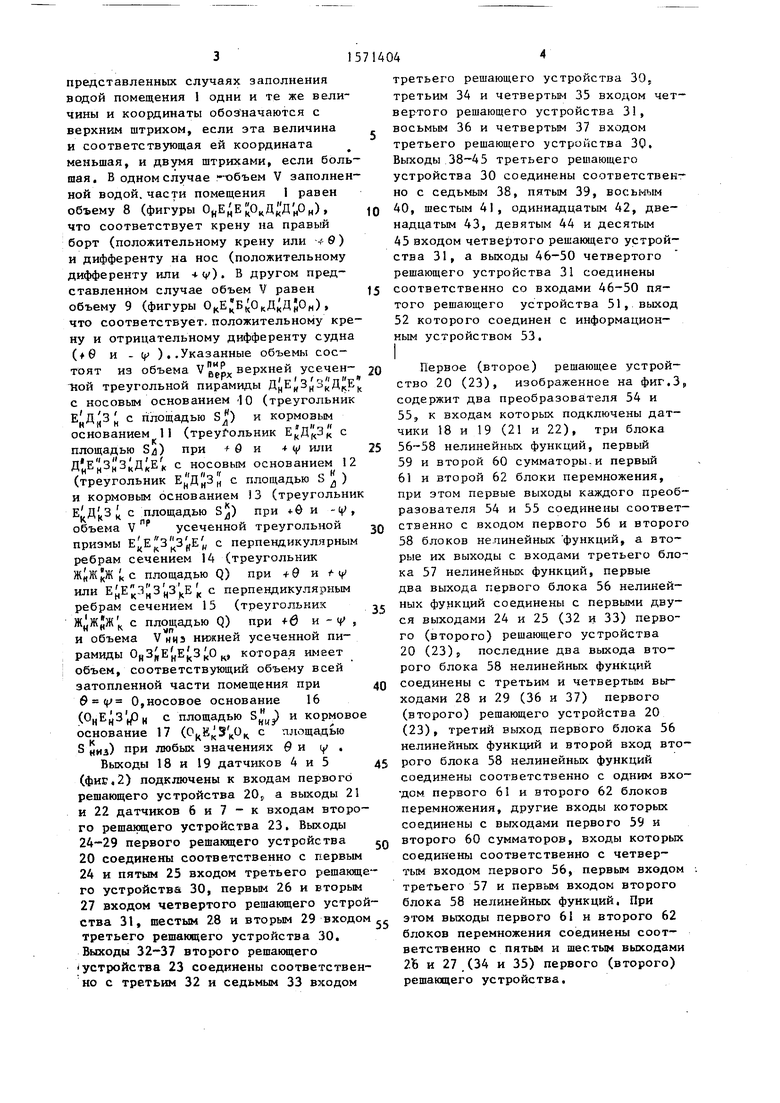
Выходы 18 и 19 датчиков 4 и 5 (фиг,2) подключены к входам первого решающего устройства 20S а выходы 21 и 22 датчиков 6 и 7 - к входам второго решающего устройства 23. Выходы 24-29 первого решающего устройства 20 соединены соответственно с первым 24 и пятым 25 входом третьего решающго устройства 30, первым 26 и вторым
соединены соответственно с одним вхо дом первого 61 и второго 62 блоков перемножения, другие входы которых соединены с выходами первого 59 и второго 60 сумматоров, входы которых соединены соответственно с четвертым входом первого 56, первым входом третьего 57 и первым входом второго блока 58 нелинейных функций, При
27 входом четвертого решающего устройства 31, шестым 28 и вторым 29 входом ,„ этом выходы первого 61 и второго 62 третьего решающего устройства 30. блоков перемножения соединены соот- Выходы 32-37 второго решающего -устройства 23 соединены соответственно с третьим 32 и седьмым 33 входом
ветственно с пятым и шестым выходами 2.U и 27, (34 и 35) первого (второго) решающего устройства.
третьего решающего устройства 30, третьим 34 и четвертым 35 входом четвертого решающего устройства 31, восьмым 36 и четвертым 37 входом третьего решающего устройства 30. Выходы 38-45 третьего решающего устройства 30 соединены соответственно с седьмым 38, пятым 39, восьмым 40, шестым 41, одиннадцатым 42, двенадцатым 43, девятым 44 и десятым 45 входом четвертого решающего устройства 31, а выходы 46-50 четвертого решающего устройства 31 соединены соответственно со входами 46-50 пятого решающего устройства 51, выход 52 которого соединен с информационным устройством 53.
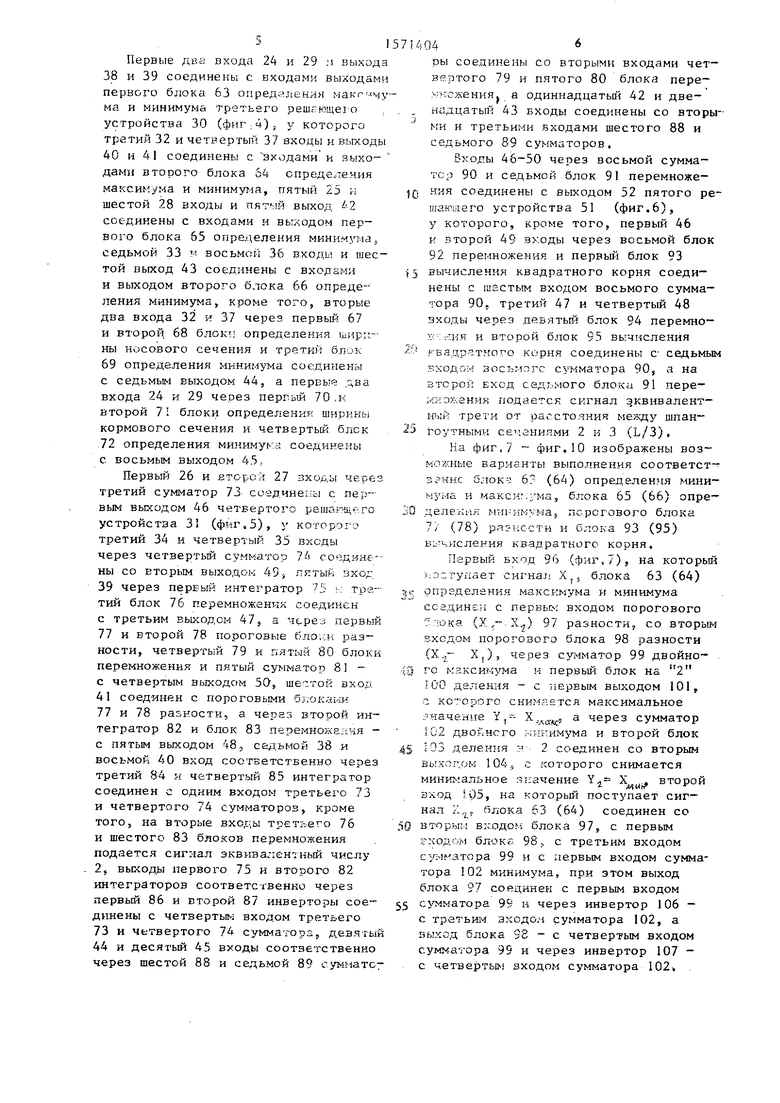
Первое (второе) решающее устройство 20 (23), изображенное на фиг.Зр содержит два преобразователя 54 и 55, к входам которых подключены датчики 18 и 19 (21 и 22), три блока 56-58 нелинейных функций, первый 59 и второй 60 сумматоры.и первый 61 и второй 62 блоки перемножения, при этом первые выходы каждого преобразователя 54 и 55 соединены соответственно с входом первого 56 и второго 58 блоков нелинейных функций, а вторые их выходы с входами третьего блока 57 нелинейных функций, первые два выхода первого блока 56 нелинейных функций соединены с первыми дву- ся выходами 24 и 25 (32 и 33) первого (второго) решающего устройства 20 (23), последние два выхода второго блока 58 нелинейных функций
соединены с третьим и четвертым выходами 28 и 29 (36 и 37) первого (второго) решающего устройства 20 (23), третий выход первого блока 56 нелинейных функций и второй вход вто-
рого блока 58 нелинейных функций
соединены соответственно с одним вхо- дом первого 61 и второго 62 блоков перемножения, другие входы которых соединены с выходами первого 59 и второго 60 сумматоров, входы которых соединены соответственно с четвертым входом первого 56, первым входом . третьего 57 и первым входом второго блока 58 нелинейных функций, При
этом выходы первого 61 и второго 62 блоков перемножения соединены соот-
этом выходы первого 61 и второго 62 блоков перемножения соединены соот-
ветственно с пятым и шестым выходами 2.U и 27, (34 и 35) первого (второго) решающего устройства.
Первые два входа 24 и 29 м выхода
38и 39 соединены с входами выходами первого блока 63 определения и минимума третьего решающего устройства 30 (фиг;4)3 у которого третий 32 и четвертый 37 входы и выходы
40и 4 соединены с входами и выходами второго блока 54 определения максимума и минимума, пятый 25 к шестой 28 входы и пктмй выход &2 соединены с входами и выходом первого блока 65 определения минимума, седьмой 33 м восьмой 36 входы и шестой выход 43 соединены с входами
и выходом второго блока 66 определения минимума, кроме того, вторые два входа 32 и 37 через первый 67 и второй 68 блоки определения ширины носового сечения и третий блок 69 определения минимума соединены с седьмым выходом 44, а первые два входа 24 и 29 через пергый 70 ,к второй 71 блоки определения ширины кормового сечения и четвертый блек .72 определения минимума соединены с восьмым выходом 4.5.
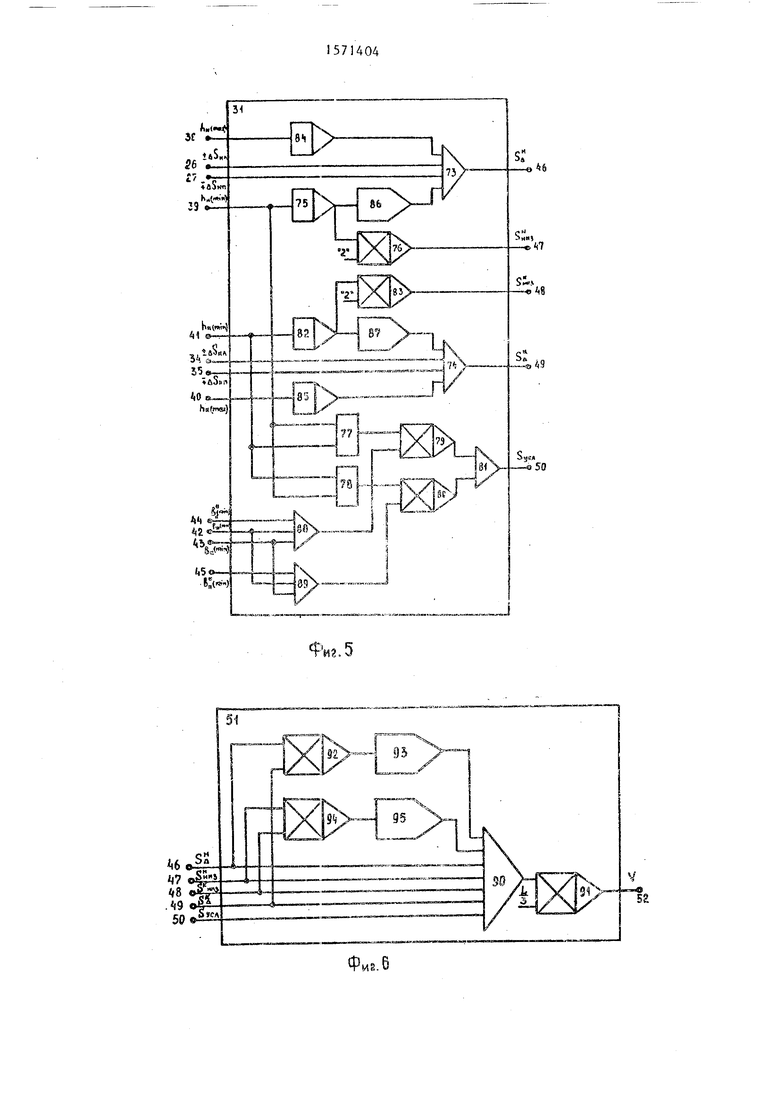
Первый 26 и втсрсл 27 входы через третий сумматор 73 соединены с первым выходом 46 четвертого решакчцего устройства 3 (фиг,5), у которого третий 34 и четвертый 35 входы через четвертый сумматор 74 соединены со вторым выходом 49, пятый вход
39через первый интегратор 73 :-.: третий блок 76 перемножения соединен
с третьим выходом 47, а через первый 77 и второй 78 пороговые бло.ск разности, четвертый 79 и пятый 80 блоки перемножения и пятый сумматор 81 - с четвертым выходом 50, шестой вход
41соединен с пороговыми блоками
77 и 78 разности, а через второй интегратор 82 и блок 83 перемножения - с пятым выходом 48э седьмой 38 и восьмой 40 вход соответственно через третий 84 и четвертый 85 интегратор соединен с одним входом третьего 73 и четвертого 74 сумматоров, кроме того, на вторые входы третьего 76 и шестого 83 блоков перемножения подается сигнал эквивалентный числу 29 выходы первого 75 и второго 82 интеграторов соответственно через первый 86 и второй 87 инверторы соединены с четвертым входом третьего 73 и четвертого 74 сумматора, девятый 44 и десятый 45 входы соответственно через шестой 88 и седьмой 89 сумматс-т
ры соединены со вторыми входами четвертого 79 и пятого 80 блока пере- шсжения а одиннадцатый 42 и две- . надцатый 43 входы соединены со вторыми и третьими входами шестого 88 и седьмого 89 сумматоров.
Входы через восьмой сумматор 90 и седьмой блок 91 перемноже-
3Ј ния соединены с выходом 52 пятого решающего устройства 51 (фиг.6), у которого, кроме того, первый 46 к второй 49 входы через восьмой блок 92 перемножения и первый блок 93
$5 вычисления квадратного корня соединены с шестым входом восьмого сумматора 90, третий 47 и четвертый 48 входы через девятый блок 94 перемно- :-::;-:кя и второй блок 95 вычисления
квадратного корня соединены с- седьмым входом восьмого сумматора 90S а на второй вход седьмого блока 91 перемножения подается сигнал эквивалентный трети от расстояния между шпан
23 гоутными сечениями 2 и 3 (L/3),
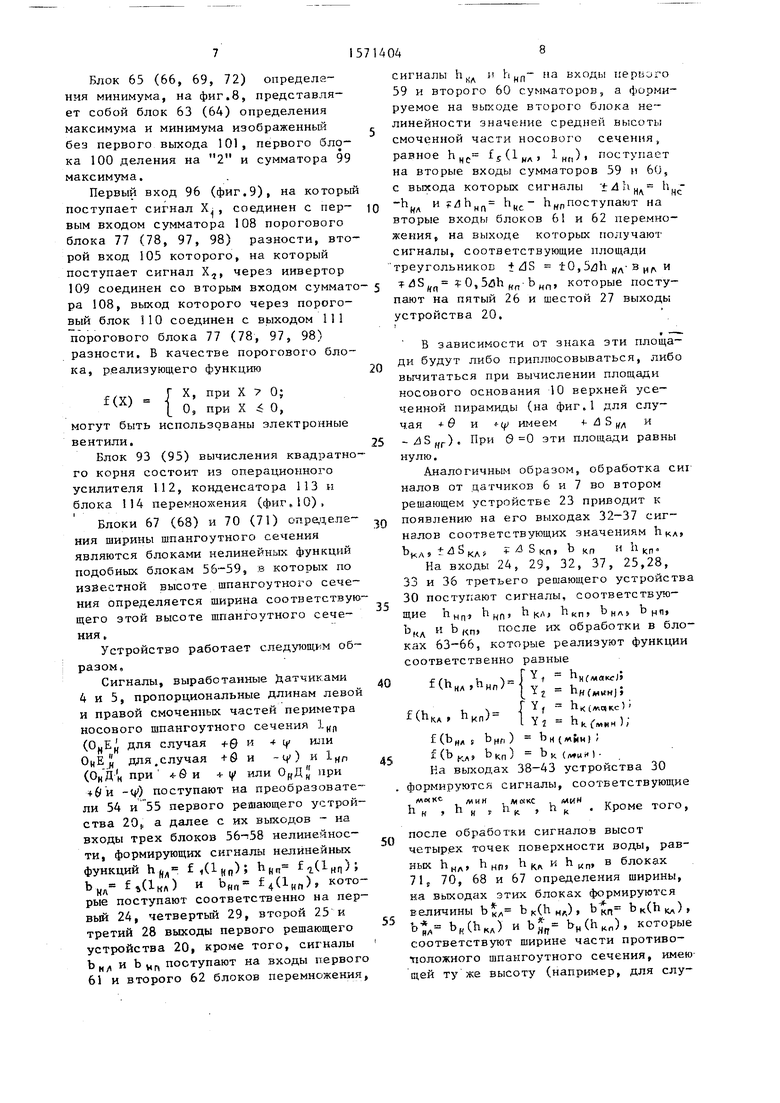
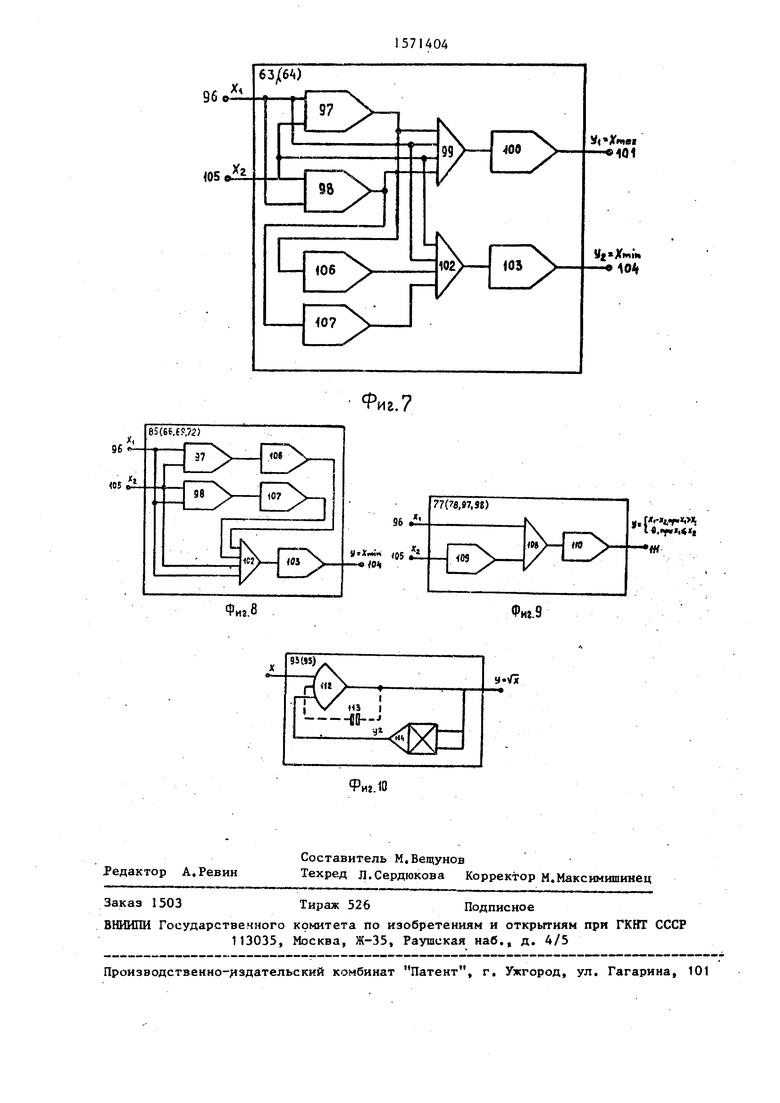
На фиг«7 фиг.10 изображены возможные варианты выполнения соответст™ згннс блок 6 (64) определения минимума и максимума, блока 65 (66) опре-
3Q деления минимума, порогового блока 7/ (78) разнести и блока 93 (95) вь-чнсления квадратного корня.
Первый вход 96 (фиг,7), на который поступает сигнал XJS блока 63 (64)
з«- определения максимума и минимума ссадине;; с первым входом порогового Сглока (Х,-Х) 97 разностиг со вторым входом порогового блока 98 разности (X,,- X,), через сумматор 99 двойно- .
10 го максимума и первый блок на 2 100 деления - с первым выходом 101, с которого снимается максимальное значение Y,- X,, а через сумматор 102 двойного минимума и второй блок
5 93 деления :j 2 соединен со вторым выходом 104э с которого снимается минимальное значение Y2 X ик второй вход 05, на который поступает сигнал Z.JP блока 63 (64) соединен со
Q вторым входом блока 97, с первым ходом блока 98., с третьим входом сумматора 99 и с первым входом сумматора 102 минимума, при этом выход блока 97 соединен с первым входом
5 сумматора 99 и через инвертор 106 - с третьим входом сумматора 102, а выход блока 98 - с четвертым входом сумматора 99 и через инвертор 107 - с четвертым входом сумматора 102 .
Блок 65 (66, 69, 72) определения минимума, на фиг.8, представляет собой блок 63 (64) определения максимума и минимума изображенный без первого выхода 101, первого блока 100 деления на 2 и сумматора 99 максимума.
Первый вход 96 (фиг.9), на который поступает сигнал X,, соединен с первым входом сумматора 108 порогового блока 77 (78, 97, 98) разности, второй вход 105 которого, на который поступает сигнал X,, через инвертор 109 соединен со вторым входом сумматора 108, выход которого через пороговый блок 110 соединен с выходом 111 порогового блока 77 (78, 97, 98) разности, В качестве порогового блока, реализующего функцию
Ј(х)
Г х, I о,
при X 7 0; при X О, могут быть использованы электронные вентили.
Блок 93 (95) вычисления квадратного корня состоит из операционного усилителя 112, конденсатора 113 н блока 114 перемножения (фиг,10),
Блоки 67 (68) и 70 (71) определения ширины шпангоутного сечения являются блоками нелинейных функций подобных блокам 56-59, в которых по известной высоте шпангоутного сечения определяется ширина соответствующего этой высоте шпангоутного сечения „
Устройство работает следующем образом.
Сигналы, выработанные датчиками 4 и 5, пропорциональные длинам левой и правой смоченных частей периметра носового шпангоутного сечения 1ил (0НЕ для случая +Q и 4 у или ОцЕд для.случая +б и цО и 1НП (0НД Н при 6 и -I- у или 0НД|| при + 6 и -V) поступают на преобразователи 54 и 55 первого решающего устройства 20,, а. далее с их выходов - на входы трех блоков 56-i58 нелинейности, формирующих сигналы нелинейных функций Ј,(„„); hHn f1(Hn); Ънл f(lKA) и Ьнп i4(lHfl), которые поступают соответственно на первый 24, четвертьй 29, второй 25 и третий 28 выходы первого решающего устройства 20, кроме того, сигналы Ьн/, и Ъ Цг, поступают на входы первого 61 и второго 62 блоков перемножения,
сигналы ЬКЛ и Ьнп на входы первого 59 и второго 60 сумматоров, а формируемое на выходе второго блока нелинейности значение средней высоты смоченной части носового сечения, равное Ьнс ЈЈ(1МЛ, 1НП), поступает на вторые входы сумматоров 59 и 60, с выхода которых сигналы -± & h н h 0 Ькл и /1Ьнп Чс Ьм„поступают на вторые входы блоков 61 и 62 перемножения, на выходе которых получаю 1 сигналы, соответствующие площади треугольников + dS tO,5dh „Л- в ил и
5 нп О «п нп которые поступают на пятый 26 и шестой 27 выходы устройства 20.
В зависимости от знака эти площади будут либо приплюсовываться, либо вычитаться при вычислении площади носового основания 10 верхней усеченной пирамиды (на фиг„1 для слу-
чая 0 и -ц имеем 4- Л S
ил
). При ( эти площади равны нулю.
Аналогичным образом, обработка сиг налов от датчиков 6 и 7 во втором решающем устройстве 23 приводит к
появлению на его выходах 32-37 сигналов соответствующих значениям Ькл Ъкл, t u S кл t + & S кп, Ъ кп и h M,
На входы 24, 29, 32, 37, 25,28, 33 и 36 третьего решающего устройства 30 поступают сигналы, соответствующие пнп, Ьнп, hM, Ькп, ЬНЛ8 Ъ нп, Ъ(л и b кп, после их обработки в блоках 63-66, которые реализуют функции соответственно равные
j Y f hH(WaKЈj;
f(hH,,hHn),Yz Ьн0тж).
f(4A, hkr { :(. :
L I j - nk fMW4 ) i
f (ьнл s ьнп) ьм(MNH) ;
f(b
КЛ
Ькп) Ьк („ы« ).
Ka выходах 38-43 устройства 30 . формируются сигналы, соответствующие
W«Kt
/ими
Л1ЙКС
мин
h н t n к. к Кроме того,
после обработки сигналов высот четырех точек поверхности воды, равных h,
и h
в блоках
НА U НГН КЛ КП
71s 70, 68 и 67 определения ширины, на выходах этих блоках формируются величины Ь Ък(пНЛ), bnth), ЬИ(ЬКЛ) и ЬН(ЬКП), которые соответствуют ширине части противоположного шпангоутного сечения, имею щей ту же высоту (например, для случая +9 и + на фиг.1 J, есть половина ребра усеченной призмы Е| Е кЗ ЗкЗмЕ и и соответствует ширине ЬЈЛ Ь кп, находящейся от основной линии на высоте ЬНЛ). После обработки в блоках 96 и 72 на выходах 44 и 45 третьего решающего устройства 30 формируются наименьшие значения из этих величин по носовому и кормовом сечениям, соответственно равным
U t
ЬК(АЛИН) И ЬКГ«И1С)
Третий 84, первый 75, второй 82 и четвертый 85 интеграторы четвертого решающего устройства 31 рассчитывают площади, ограниченные линией шпангоутного сечения корпуса, вертикально и горизонтальной плоскостями при положении судна на ровном киле. Например, для случая +0 и +w интеграторы 75 и 84 рассчитывают площади ОцЕцЖц и 0НД НК по формулам ЧОияН)Ни (маке/
lH(h)c/h и J H(h)(Jh. Интеграо°
торы 82 и 85 рассчитывают площади,
х(иим|Ь ккакс-,
равные lk(h)Jh и J l tOnrti.
ов
На первом выходе 46 четвертого
решающего устройства 31 формируется сигнал, соответствующий площади носового основания 10 (12) верхней усеченной призмы и равный
и ) Ьмбмин
Su 5 lH(h)dh-j H(h)Jht
145Н°Л 7 Л5НП ° (1), при этом первое слагаемое формируется на выходе третьего интегратора 84, на вход которого поступает сигнал Ьн(мо|КС|С седьмого входа 38 устройства 31, второе слагаемое формируется после обработки поступающего с пятого входа 39 сигнала h ( в первом интеграторе 75, а затем в инверторе 86. Сигналы, соответствующие первым двум слагаемым выражения (), и сигналы, соответствующие idSH/, и Д5нп, со входов 26 и 27. поступают на входы сумматора 73, на
выходе которого формируется сигнал
Sa . Аналогичным образом, сигналы h«(MHHj и hK(A,aWj, проходя со входов 41 и 40 через второй 82 и четвертый 85 интеграторы и инвертор 87, сум- мируясь с соответствующими знаками в сумматоре 74, куда поступают и сигналы ±4S к и + Л S кп с входов 34 и 35, образуют на выходе 49 сигнал
51 Г l (h)h - )dh i
кн
соответствующий площади кормового ос иования 11 (13) верхней усеченной призмы.
5 Получаемые на выходе первого 75 и второго 82 интеграторов сигналы удваиваются в блоках 76 и 83 и на выходах 47 и 48 формируются сигналы
n«f«MKj
Ч(МИ«|
0
SH,5 2 I lH(h)rfh и Ss;. 2 j lK(h)«th,
о
соответствующие площадям носового 16 и кормового 17 оснований нижней усеченной пирамиды.
На входы пороговых блоков 77 и 78 разности поступают сигналы hK(MMI)j и
(Mnrf а на вых°Де формируются сигналы, соответствующие приращению высоты за счет дифферента Ь4, при этом блок 77 реализуют функцию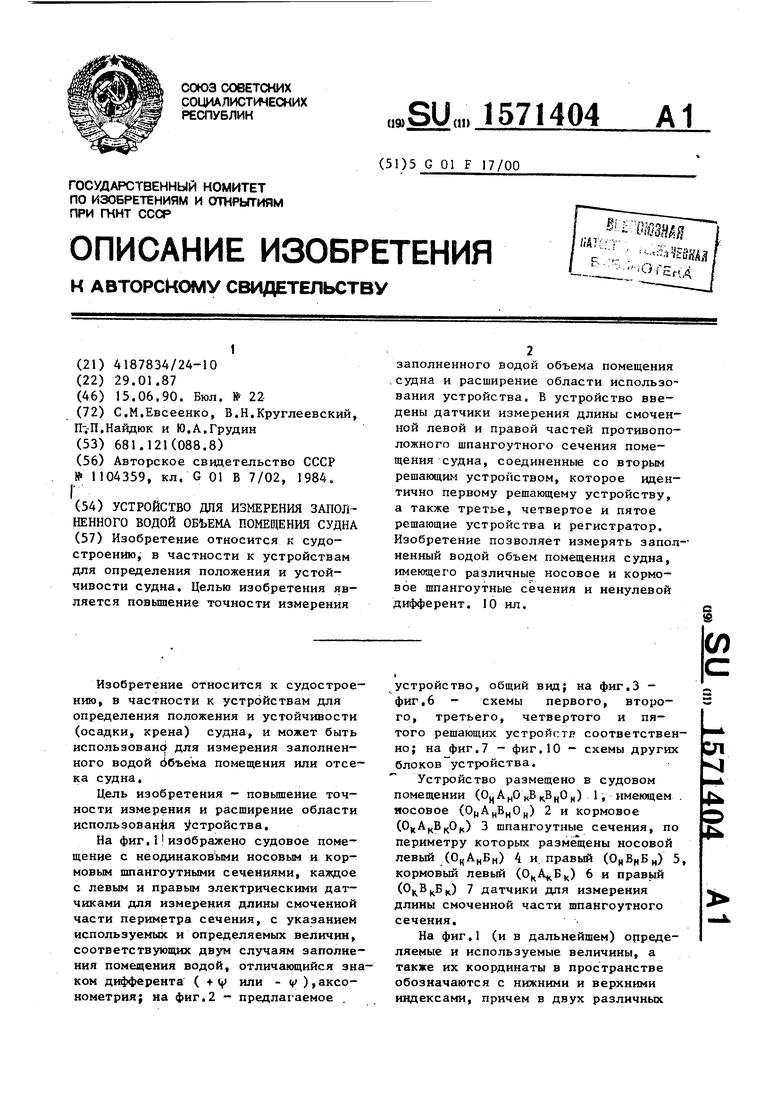
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения посадки судна | 1987 |
|
SU1452745A1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА | 2019 |
|
RU2719711C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЗНАЧЕНИЙ ЭКСПЛУАТАЦИОННЫХ ХАРАКТЕРИСТИК ОБСЛУЖИВАЕМЫХ ИЗДЕЛИЙ | 2012 |
|
RU2525754C2 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| Прибор Грудина для измерения объема затопляемого помещения судна | 1983 |
|
SU1104359A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЗНАЧЕНИЙ ХАРАКТЕРИСТИК НАДЕЖНОСТИ ИЗДЕЛИЯ | 2010 |
|
RU2452028C2 |
| Субоптимальный нелинейный фильтр | 1990 |
|
SU1714618A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭКСПЛУАТАЦИОННО-ТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК ИЗДЕЛИЯ ПРИ ОПТИМАЛЬНОМ ПЕРИОДЕ ЕГО ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ | 2014 |
|
RU2553077C1 |
| Устройство для приема цифровых сигналов с непрерывной фазовой модуляцией | 1989 |
|
SU1690211A1 |
| Устройство для определения рентабельности изделий | 1988 |
|
SU1522262A1 |
Изобретение относится к судостроению в частности к устройствам для определения положения и устойчивости судна. Целью изобретения является повышение точности измерения заполненного водой объема помещения судна и расширение области использования устройства. В устройство введены датчики измерения длины смоченной левой и правой частей противоположного шпангоутного сечения помещения судна, соединенные со вторым решающим устройством, которое идентично первому решающему устройству, а также третье, четвертое и пятое решающие устройства и регистратор. Изобретение позволяет измерять заполненный водой объем помещения судна, имеющего различные носовое и кормовое шпангоутные сечения и ненулевой дифферент. 10 ил.
{+ V u - . П - U, пм(мин) Ј hK(MWH| ,
а блок 78 реализует функцию
-V
ПК(МИН)
Ьн.мин,) Hu-V Ьк(Гн)-пн,гин , ЬК(МИН,ЬИ1МЯИ1;
l4h r 0, h
К и)
Јh«
(мин)
Значения ahr и д Г поступают на первые входы блоков 79 и 80 перемножения, на вторые входы которых с выхода сумматоров 88 и 89 поступают сумма длин ребер усеченной треугольной призмы, значение b 5 которой при +v равно b b(lwv,K) + + b (МИи) Ьи(ни), а при V Ь с«ин| . ьк(м-.и) . ьи{мим) ПРЧ
45
н)-пн,гин , Ь
К и)
Јh«
(мин)
этом на входы сумматоров 88 и 89 со входов 44, 42, 43 и 45 решающего устройства 31 поступают сигналы, соответствующие ь(мин) , ьк(мин), ьк(ми„,
и bu(«u«i Ha выходе сумматора 50 фор- KiMnnj
мируется сигнал, соответствующий
условной площади 5усд , равной произведению суммы длин ребер усеченной
призмы на высоту 4h V поперечного, перпендикулярной ребрам, сечения 15 (Q)Tp eS M ууГГ
0.
ДЪ. v b f, при (0
На входы 46-50 пятого решающего устройства 51 поступают сигналы, соответствующие S, SHH4J, , S и S усл , которые поступают на первые пять входов сумматора 90, на вторые
(sJ+ls Y + S«)+(SHHM3 t fsJH3- + 8КИ10 ) + 5уСл,
Который поступает на седьмой вход блока 91 перемножения, на второй вход которого поступает сигнал, равный20
- vKt
V
.пр
„ пир V ни
L/3 (
о И
ьа
который поступает на информационное устройство 53.
Формула изобретения Устройство для измерения заполнен-
ного водой объема помещения судна, содержащее электрические датчики для измерения длины смоченной левой и правой частей шпангоутного сечения помещения судна, информационное устрой- ство и первое решающеее устройство, содержащее два преобразователя, к входам которых подключены датчики, первые выходы1каждого преобразователя соединены, соответственно с входами первого и второго блоков нелинейных функций, вторые выходы каждого преобразователя подключены к третьему блоку нелинейных функций, первые выходы . первого и второго блоков нелиней- ных функций подключены к входам соответственно первого и второго сумматоров, вторые выходы - к первым входам соответственно первого и это- рого перемножителей, выходы третьего блока нелинейных функций подключены к вторым входам блоков первого и второго сумматоров, выходы которых подключены к вторым входам первого и перемножителей, о т л и - ч а--к щ е е с я тем, что, с целью повышения точности измерения и расширения области использования, в него введены датчики длины смоченной ле
два входы которого поступают сигналы,
соответствующие величинам У S S и с 3
чЭ которые формируются
на выходе блоков 93 и 95 вычисления квадратного корня, на входы которых поступают произведения площадей ) и (S низ ) с выхода блоков 92 и 94 перемножения, на входы которых поступают сигналы с входов 46-49 устройства 51. Таким образом, на выходе сумматора формируется сигнал, соответствующий
0
о к ь и
5
0
35
40
50
55
L/3S и на выходе которого и выходе пятого решающего устройства формируется сигнал, соответствующий
f Зй) + (5нИЗ + ЬННиэ. 5НКИ5 SЈM3)+ S,4
вой и правой частей противоположного шпангоутного сечения помещения судна, соединенные с вторым идентичным первому решающим устройством, первый и второй выходы которых соединены соответственно с третьим и четвертым выходами первого блока нелинейных функций, третий и четвертый - с третьим и четвертым выходами второго блока нелинейных функций, а пятый и шестой выходы решающего устройства соединены с выходами первого и второго блоков перемножителей соответственно, третье решающее устройство, у которого первые и вторые входы и выходы соединены с входами и выходами первого блока определения максимума и минимума, третий и четвертый входы и выходы соединены с входами и выходами второго блока определения максимума и минимума, пятый и шестой входы и пятый выход соедине- ны с входами и выходом первого блока определения минимума, седьмой и восьмой входы и шестой выход соединены с входами и выходом второго блока определения минимума, кроме того, третий и четвертый входы через первый и второй блоки определения ширины носового сечения соединены с двумя входами третьего блока определения минимума, выход которого соединен с седьмым выходом, а первый и в торой входы через первый и второй блоки определения ширины кормового
13
сечения соединены с двумя входами четвертого блока определения минимума, выход которого соединен с восьмым выходом, четвертое решающее устройство, у которого первый и второй вход через третий сумматор соединены с первым выходом, третий и четвертый входы через четвертый сумматор соединены с вторым выходом, пятый вход через первый интегратор и третий блок перемножения соединен с третьим выходом, а через первый и второй пороговые блоки резиости, четвертый и пятый блок перемножения и пятый сумматор - с четвертым выходом шестой вход соединен с первым и вторым пороговыми блоками разности, а через второй интегратор и шестой блок перемножения - с пятым выходом, седьмой и восьмой вход соответственно через третий и четвертый интегратор соединены с третьими входами третьего и четвертого сумматоров соответственно, кроме того, на вторые входы шестого и третьего блоков пе ремножения подается сигнал, эквивалентный числу 2, выходы первого и второго интеграторов соответственно через первый и второй инверторы соеинены с четвертыми входами третьего и четвертого сумматора, девятый и деятый входы соответственно через шестой и седьмой сумматор согдинены с торыми входами четвертого и пятого блока перемножения, а одиннадцатый двенадцатый входы соединены с торыми и третьими входами а
71404I4f
седьмого сумматоров соответственно, пятое решающее устройство, у которого все пять входов через восьмой сумматор и седьмой блок перемножения сое- динены с выходом, кроме того, пер- вый и второй входы через восьмой блок перемножения и первый блок вычисления квадратного корня соединены
JQ с шестым входом восьмого сумматора, третий и четвертый входы через девятый блок перемножения и второй блок вычисления квадратного корня соединены с седьмым входом восьмого суммаjj тора, а на второй вход седьмого блока перемножения подается сигнал, эквивалентный трети от расстояния между шпангоутными сечениями, при этом выходы первого решающего устройства
20 соединены соответственно с первым, пятым, шестым, вторым входами тре- тьего, первым, вторым входом четвертого решающего устройства, выходы второго решающего устройства соединены
25 соответственно с третьим, седьмым, восьмым, четвертым входами третьего, третьим, четвертым входом четвертого решающего устройства, выходы третьего решающего устройства соединены
30 соответственно с седьмым, пятым, восьмым, шестым, одиннадцатым, двенадцатым, девятым, десятым входами четвертого решающего устройства, выходы четвертого решающего устройства
35 соединены соответственно с входами пятого решающего устройства, выход которого соединен с информационным устройством.
иг. 2
«(20
1(22)
Ч 24(32) о 25 (33)
о 26(34}
&Sn с 27 (35)
(36) С 29 (37
Фиг, 5
иг.А
«OS
зс
ОШ5|
«5 о
Фиг.8
Риг.7
эе;
Д5 .
it.t
.
W
Фиг.9
| Прибор Грудина для измерения объема затопляемого помещения судна | 1983 |
|
SU1104359A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Г | |||
