Изобретение относится к радиоэлектронике и может быть использовано в приемниках навигационных сигналов GPS, ГЛОНАСС или ГАЛИЛЕО.
Известно устройство поиска навигационных сигналов, содержащее перемножители входного сигнала с синусной и косинусной компонентами управляемого по частоте опорного генератора, выходы которых соединены с многоканальным коррелятором по каждой квадратуре соответственно. Выходы корреляторов соединены с когерентными накопителями. Выходы когерентных накопителей по двум квадратурам каждого отдельного коррелятора соединены с блоком вычисления огибающей, выходы которых соединены с решающим устройством с установленным порогом сравнения. (Глонасс: принципы построения и функционирования. Изд. 3-е под ред. А.И.Перова, В.Н.Харисова. Москва, Радиотехника, 2005 г.).
Такое устройство быстрого поиска навигационных сигналов имеет излишнюю избыточность в числе двоичных разрядов сигнала на выходе корреляторов и, как следствие, в общем объеме всего устройства.
Кроме того, устройство имеет относительно высокий энергетический порог обнаружения сигнала из-за того, что решение о наличии сигнала на данной позиции принимается из множества (порядка десятка, а иногда и сотен тысяч) возможных решений путем сравнения с порогом.
Известно устройство поиска навигационных сигналов, содержащее по каждой квадратуре перемножитель входного сигнала с опорным сигналом управляемого по частоте генератора, выход которого соединен с предварительным сумматором, интервал накопления которого определяется тактовой частотой кода.
Выход последнего соединен с многоканальным коррелятором дальномерного псевдошумового кода, включающим в себя накопитель на периоде псевдошумового кода, выход последнего соединен по каждой квадратуре с сумматором с обратной связью, второй вход и выход которого соединены с оперативным запоминающим устройством (далее ОЗУ), в результате чего по каждой квадратуре осуществляется когерентное накопление сигнала, параллельно выходы сумматора с обратной связью подключены к вычислителю огибающей, выход которого соединен со вторым сумматором с обратной связью, второй вход и выход которого соединены с ОЗУ, что позволяет осуществить некогерентное накопление сигнала. ОЗУ реализует функцию отбора максимального из записанных в ОЗУ сигналов (патент US 6487499, 26 ноября 2002 г.).
В этом устройстве поиска навигационных сигналов, наиболее близком к предлагаемому, имеется избыточность в числе двоичных разрядов сигнала на выходе предварительного сумматора и, как следствие, в общем объеме всего устройства. Выбор максимального из записанных в ОЗУ накопленных значений сигналов при их очень большом числе снижает энергетический порог обнаружения сигнала из-за высокой вероятности ложных отсчетов.
При наличии дополнительной модуляции дальномерного кода вторичным кодом и отсутствии знания о границах вторичного кода требуется повторный поиск со сдвигом начальной фазы интервала когерентного накопления, что приводит к увеличению общего времени поиска сигнала.
Предлагаемым изобретением решаются задачи сокращения избыточности в числе двоичных разрядов на выходе предварительного сумматора, снижения энергетического порога обнаружения сигнала и уменьшения общего времени поиска сигнала.
Для достижения этого технического результата в устройство поиска навигационных сигналов, содержащее по каждой квадратуре перемножитель входного сигнала с опорным сигналом управляемого по частоте генератора, выход которого соединен с предварительным сумматором, интервал накопления которого определяется тактовой частотой кода, многоканальный коррелятор дальномерного псевдошумового кода, выходы которого по каждой орте соединены с соответствующими входами первого и второго ОЗУ, сумматор с обратной связью, второй вход и выход которого соединены с третьим ОЗУ, дополнительно введены преобразователь накопленной суммы по каждой квадратуре, первый вход которого подключен к выходу предварительного сумматора, второй вход является установочным, а выход соединен со входом многоканального коррелятора, выходы которого, соответствующие каждому отдельному коррелятору по каждой квадратуре, соединены с соответствующими входами первого и второго ОЗУ и, параллельно, соединены со входом последовательно соединенных первых и вторых элементов задержки, выходы которых соединены с соответствующими входами первого и второго ОЗУ по каждой квадратуре, первый и второй выходы которых по каждой орте соединены соответственно с первым, вторым, третьим и четвертым входами первого квадратурного фильтра, второй и третий выходы первого и второго ОЗУ соответственно по каждой квадратуре соединены соответственно с первым, вторым, третьим и четвертым входами второго квадратурного фильтра, выходы которых соответственно соединены с первым и вторым входом определителя максимума, выход которого соединен со входом сумматора с обратной связью, выход третьего ОЗУ соединен со стек-памятью на "К" позиций, выход которой соединен со входом решающего устройства, выход которого является выходом устройства поиска навигационных сигналов.
Признаки, отличающие предлагаемое устройство поиска навигационных сигналов от наиболее близкого к нему известного по патенту US 6,487,499 (прототип), характеризуют:
1. Наличие преобразователя накопленной суммы по каждой квадратуре, первый вход которого подключен к выходу предварительного сумматора, второй вход является установочным, а выход соединен со входом многоканального коррелятора, что обуславливает минимизацию числа разрядов на выходе преобразователя накопленной суммы при требуемом качестве преобразования или допустимом уровне энергетических потерь.
2. Наличие двух последовательно соединенных элементов задержки в каждом канале коррелятора, выходы которых соединены с соответствующими входами первого и второго ОЗУ по каждой квадратуре, первый и второй выходы которых по каждой квадратуре соединены соответственно с первым, вторым, третьим и четвертым входами первого квадратурного фильтра, второй и третий выходы первого и второго ОЗУ соответственно по каждой квадратуре соединены соответственно с первым, вторым, третьим и четвертым входами второго квадратурного фильтра, выходы которых соответственно соединены с первым и вторым входом определителя максимума, выход которого соединен со входом сумматора с обратной связью, что обуславливает снижение общего времени поиска сигнала при наличии вторичной модуляции дальномерного кода и отсутствии знания о начальной фазе вторичного кода за счет дополнительного когерентного накопления при сдвиге начальной фазы накопления на τког/2, формирования двух результирующих сигналов по когерентному накоплению на выходах квадратурных фильтров и выбора из них максимального сигнала при подаче на определитель максимума.
3. Наличие стек-памяти из "К" позиций, вход которой соединен со вторым выходом третьего ОЗУ, а "К" выходов соединены с решающим устройством, что обуславливает снижение энергетического порога обнаружения сигнала за счет того, что среди "К" выделенных позиций из всего множества возможных сигналов выбираются только те сигналы, которые превосходят все остальные, и тем самым вероятность, что в "К" отобранных сигналах имеется и "истинный" сигнал существенно выше, чем если бы требовалось, чтобы "истинный" был обязательно больше других. Выбором величины "К" можно регулировать указанную вероятность обнаружения сигнала.
На чертеже приведена блок-схема предлагаемого устройства поиска навигационных сигналов.
Устройство поиска навигационных сигналов содержит перемножитель 1, управляемый по частоте генератор 2, предварительный сумматор 3, преобразователь накопленной суммы 4, многоканальный коррелятор 5, первый и второй элементы задержки на τког/29 и 10, первое и второе ОЗУ 11 и 12, первый и второй квадратурный фильтры 13 и 14, определитель максимума 18, сумматор с обратной связью 19, третье ОЗУ 20, стек-память на "К" позиций 21, решающее устройство (РУ) 22.
Канальный коррелятор 5 содержит перемножитель 6, генератор дальномерного кода 7, накопитель 8.
Квадратурные фильтры 13 и 14 содержат сумматоры 15, вычислители огибающей 16, определитель максимума 17.
Устройство поиска навигационных сигналов работает следующим образом.
Сигнал с выхода промежуточной частоты аналогового тракта приемника, оцифрованный в один, два или более разрядов с выбранной частотой дискретизации, поступает на вход устройства по двум квадратурам I и Q, где преобразуется в видеоспектр за счет перемножения в перемножителях (1) с опорным сигналом управляемого по частоте генератора (2), выходы с перемножителей по каждой квадратуре поступают на предварительный сумматор 3, в котором происходит накопление входного сигнала на интервале, равном длительности символа дальномерного кода. Число разрядов накопленного сигнала определяется разрядностью входного сигнала (обычно 2 разряда), разрядностью опорного сигнала (обычно 3-4 разряда) и числом отсчетов на интервале накопления в предварительном сумматоре (эта величина варьируется в пределах 5-7 разрядов).
В итоге сигнал на выходе предварительного сумматора (3) может иметь от 11 до 13 разрядов, что при дальнейшей обработке в многоканальном корреляторе резко увеличивает общее число требуемых элементов. Учитывая, что распределение значений смеси сигнала и шума на выходе предварительного сумматора имеет гауссов характер, можно аналогично цифровому преобразованию аналогового сигнала преобразовать многоразрядный цифровой сигнал в двух- или трехразрядный, потери при этом не превысят соответственно 1,0 и 0,2 дБ. Для выполнения данного преобразования вводится значение дисперсии шума σш на выходе предварительного накопителя. Эта величина для каждого конкретного устройства может быть заранее рассчитана, так как она определяется параметрами аналого-цифрового преобразователя, генератора опорного сигнала, а также числом суммируемых отсчетов в предварительном сумматоре.
С выхода преобразователя накопленной суммы (4) сигнал по каждой квадратуре поступает на многоканальный коррелятор (5). В многоканальном корреляторе определяется корреляция между сдвинутыми по задержке N возможными сигналами, формируемыми в генераторе дальномерного кода (7), и сигналом с выхода преобразователя накопленной суммы (4) по каждой из квадратур I и Q посредством перемножения их в перемножителях (6) и последующего накопления в накопителе (8). Время накопления составляет половину выбранного интервала когерентного накопления τког/2, после чего результат накопления через элементы задержки 9 и 10 поступает в ОЗУ-1 (11) для квадратуры I и в ОЗУ-2 (12) для квадратуры Q.
Для формирования частотной характеристики с расширенной полосой пропускания на квадратурный фильтр подаются по две пары сигналов, сдвинутых между собой на τког/2.
На квадратурный фильтр (13) указанные сигналы через память ОЗУ-1 и ОЗУ-2 поступают с выходов накопителей (8) и элементов задержки (9); на квадратурный фильтр (14) сигналы через ОЗУ-1 и ОЗУ-2 поступают с выходов элементов задержки 9 и 10. Таким образом, сигнал с выхода квадратурного фильтра (14) сдвинут относительно сигнала с выхода квадратурного фильтра (13) на половину интервала когерентного накопления τког/2.
Это позволяет существенно уменьшить энергетические потери, которые могут возникнуть из-за несогласованности границ интервала когерентного накопления с границами символов вторичной модуляции дальномерного кода, и тем самым отпадает необходимость повторного поиска навигационного сигнала со сдвинутой начальной фазой интервала когерентного накопления.
Сигналы с выходов квадратурных фильтров 13 и 14, представляющие собой модуль огибающей, подаются на определитель максимума (18) и через сумматор с обратной связью (19), позволяющий реализовать некогерентное накопление сигналов, подаются на вход ОЗУ-3 (20), выход которой подключен ко второму входу сумматора (19). Накопленные в ОЗУ-3 (20) N сигналов подаются в стек-память на "К" позиций (21).
В стек-памяти из N входных сигналов с учетом ранее отобранных "К" сигналов отбирают новые "К" сигналов, которые имеют максимальные значения, их ранжируют и передают в решающее устройство (22). В решающем устройстве (22) в зависимости от распределения отобранных сигналов принимают решение одномоментно или направляют некоторые решения на перепроверку.
Частотная характеристика квадратурного фильтра в простейшем для реализации варианте формируется путем выбора максимального значения огибающей сигнала (16) из трех альтернатив, каждая из которых реализуется путем суммирования (15) с определенными знаками двух сигналов, одного из группы I1, Q1, а второго из группы I2, Q2 для первого квадратурного фильтра и соответственно I2, Q2 и I3, Q3 для второго квадратурного фильтра, и определения огибающей для каждой пары.
Эффективность предлагаемого устройства поиска навигационных сигналов заключается в следующем:
- минимизируется разрядность отсчетов сигнала на входе коррелятора с учетом допустимого уровня энергетических потерь за счет введения преобразователя накопленной суммы,
- снижается общее время поиска сигнала при наличии вторичной модуляции дальномерного кода и отсутствии знания о начальной фазе вторичного кода за счет дополнительного когерентного накопления при сдвиге начальной фазы накопления на τког/2, формирования двух результирующих сигналов по когерентному накоплению на выходах квадратурных фильтров и выбора из них максимального сигнала при подаче на определитель максимума,
- снижается энергетический порог обнаружения сигнала за счет того, что среди "К" выделенных позиций из всего множества возможных сигналов выбираются только те сигналы, которые превосходят все остальные, и тем самым вероятность, что в "К" отобранных сигналах имеется и "истинный" сигнал существенно выше, чем если бы требовалось, чтобы "истинный" был обязательно больше других.
Выбором величины "К" можно регулировать указанную вероятность обнаружения сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ ПО ЧАСТОТЕ | 2006 |
|
RU2332793C1 |
| СПОСОБ ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2409892C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ НАВИГАЦИОННЫХ СИГНАЛОВ ГЛОНАСС, GPS И ГАЛИЛЕО | 2010 |
|
RU2435307C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ М-ПОСЛЕДОВАТЕЛЬНОСТИ | 1983 |
|
SU1840196A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ М-ПОСЛЕДОВАТЕЛЬНОСТИ | 1984 |
|
SU1840075A1 |
| СПОСОБ ОЦЕНИВАНИЯ ФАЗЫ НАВИГАЦИОННОГО СИГНАЛА НА ФОНЕ МЕШАЮЩИХ ОТРАЖЕНИЙ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ И НАВИГАЦИОННЫЙ ПРИЕМНИК С УСТРОЙСТВОМ ПОДАВЛЕНИЯ МЕШАЮЩИХ ОТРАЖЕНИЙ ПРИ ОЦЕНКЕ ФАЗЫ | 2016 |
|
RU2625804C1 |
| ЦИФРОВОЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2011 |
|
RU2467351C1 |
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ПРИЕМА СИГНАЛОВ РАЗЛИЧНЫХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2015 |
|
RU2611069C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ СЛОЖНЫХ СИГНАЛОВ | 1987 |
|
SU1840228A1 |
| ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ С УСТРОЙСТВОМ БЫСТРОГО ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ В УСЛОВИЯХ ВЫСОКОЙ ДИНАМИКИ ОБЪЕКТА | 2006 |
|
RU2341898C2 |
Изобретение относится к радиоэлектронике и может быть использовано в приемниках навигационных сигналов GPS, ГЛОНАСС или ГАЛИЛЕО. Технический результат заключается в снижении общего времени поиска сигнала. Устройство содержит перемножитель, управляемый по частоте генератор, предварительный сумматор, преобразователь накопленной суммы, многоканальный коррелятор, два элемента задержки, три ОЗУ, два квадратурных фильтра, определитель максимума, сумматор с обратной связью, стек-память на "К" позиций и решающее устройство, при этом многоканальный коррелятор содержит перемежитель, генератор дальномерного кода и накопитель, квадратурные фильтры содержат сумматоры, вычислители огибающей, определитель максимума. 1 ил.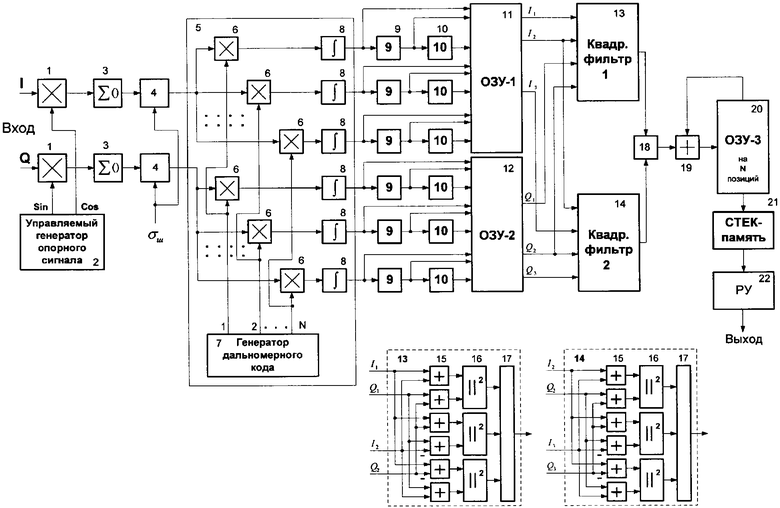
Устройство поиска навигационных сигналов, содержащее по каждой квадратуре перемножитель входного сигнала с опорным сигналом управляемого по частоте генератора, выход которого соединен с предварительным сумматором, интервал накопления которого определяется тактовой частотой дальномерного кода, многоканальный коррелятор дальномерного псевдошумового кода, сумматор с обратной связью, второй вход и выход которого соединены с третьим ОЗУ, отличающийся тем, что в него дополнительно введены преобразователь накопленной суммы по каждой квадратуре, два последовательно соединенных элемента задержки в каждом канале многоканального коррелятора дальномерного псевдошумового кода, первое и второе ОЗУ, квадратурные фильтры, определитель максимума и стек-память на К позиций, первый вход преобразователя накопленной суммы подключен к выходу предварительного сумматора, второй вход является установочным, а выход соединен со входом многоканального коррелятора, в многоканальном корреляторе определяется корреляция между сдвинутыми по задержке N возможными сигналами, формируемыми в генераторе дальномерного кода, и сигналом выхода преобразователя накопленной суммы по каждой квадратуре посредством перемножения их в перемножителях и последующего накопления в накопителях, после чего результат накопления поступает на два последовательно соединенных элемента задержки каждого канала многоканального коррелятора по каждой квадратуре, выходы накопителей по каждой квадратуре соединены с соответствующими входами первого и второго ОЗУ, а выходы первых и вторых элементов задержки соединены с соответствующими входами первого и второго ОЗУ по каждой квадратуре, первый и второй выходы которых по каждой квадратуре соединены соответственно с первым, вторым, третьим и четвертым входами первого квадратурного фильтра, второй и третий выходы первого и второго ОЗУ соответственно по каждой квадратуре соединены соответственно с первым, вторым, третьим и четвертым входами второго квадратурного фильтра, выходы которых соответственно соединены с первым и вторым входами определителя максимума, выход которого соединен со входом сумматора с обратной связью, выход третьего оперативного запоминающего устройства соединен со стек-памятью на К позиций, выход которой соединен со входом решающего устройства, выход которого является выходом устройства поиска навигационных сигналов.
| US 6487499 B1, 26.11.2002 | |||
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2205417C2 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2167431C2 |
| Печь для плавки баббита | 1931 |
|
SU31888A1 |
| US 6061390 A, 09.05.2000. | |||

