1453418
Изобретение относится к информационно-измерительной технике и может быть использовано в измерительных системах, в которых измерительньм сигнал интегрируется до заданного значения результата интегрирования.
Цель изобретения - повышение точности путем обеспечения инвариантности интегрального значения к аддитив- ю ным., мультипликативным погрешностям и погрешностям линейности и повышение быстродействия.
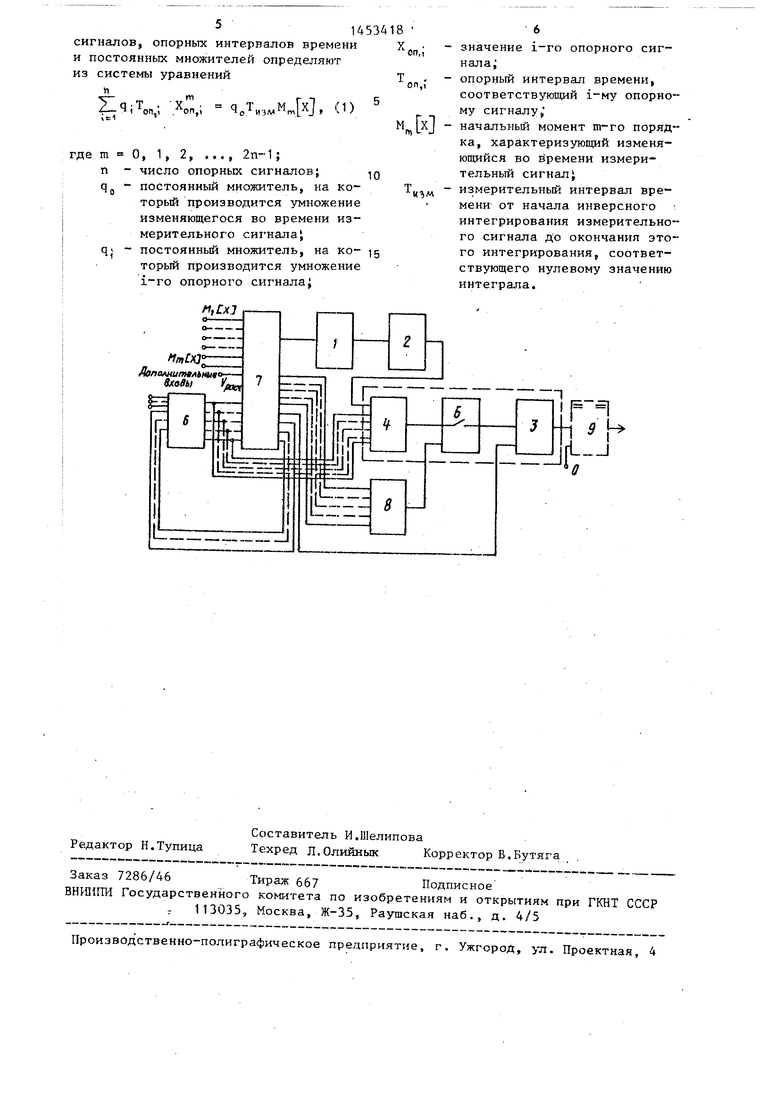
На чертеже представлена функциональная схема устройства, реализую- 15 щего предлагаемый способ определения. Устройство содержит источник 1 измерительного и опорных сигналов, измерительную систему 2, интегратор 3,
Q - V Vi 4oT.,.Mjx.
2)
Исходя из необходимого времени вы полнения уставки устанавливают через дополнительные входы в блоке 6 постоянных множителей значения постоянных множителей q,-q, которые в процессе работы передаются в управляющее вычислительное устройство 7 и в умножитель 4. С учетом перечисленных исходных данных определяют необходимые значения опорных сигналов X оп,п и соответствующих им опорных
ОП.1
-т
ОП.П
Заум„ож„.ел 4, кл, 5. .лок 6 „„с™;;. 20 Го с/г,™ГГг„
НЬГХ МНП-игы-готтотЧ ,тт,,,„„„ , млл 4t;i О
ных множителей, управляющее вычислительное устройство 7, преобразователь 8 код - временной интервал, нуль-орган 9. В качестве измеритсшьинтервалов времени Т
tJMb 1 - ип-п
тем в течение каждого опорного интервала времени осуществляют измерительное преобразование соответствующего этому опорному интервалу опорнос источника 1
- r.,- тельной системы 2. измерительный «-яГ .- ,::Zn:измерительного и опорных сигналов, управляемого управляющим вычислительным устройством 7, на вход измерительной системы 2, измерительный катипликативные погрешности и погрешности от нелинейности функции преобразования, последовательно поступают
опорные сигналы X -X
ОП.1
Каждый
множитель q- . Множители q,-q|, поступают на вход умножителя 4 в виде дво- ичньк кодов с выхода блока 6 посто - - ., . -и-А AJ J Ч J I V С С
могут быть любые- физические величины, а форма представления сигнала может быть разнообразной (аналоговой, импульсной или цифровой). В конкретном устройстве источником 1 измеритель- ЗО из опооных
:.--„ ZLS -::
регрузки (ускорение).в движущемся транспорте (автомобте) и либо земное
- ;
Образующая измерительный канал, включает в себя датчик ускорения, усилитель и частотно-импульсньй измерительный преобразователь (Ч1ШП) и является источником аддитивной и мультипликативной погрешности и погрешности линейности, описываемой полиномом т-й степени.
Сущность предлагаемого способа
ляющего вычислительного устройства 7.
Во время существования на выходе умножителя 4 каждого результата множения в течение опорного временного интервала Топ,; включается ключ 5 и выполняется прямое интегрирование выходного сигнала умножителя 4 с помощью интегратора 3. При этом
45 формирование управляющего сигнала ключа 5 вьтолняется с помощью измерительного преобразователя 8 код - временной интервал, на входы которого
j::rzL----ir l - -:
. управляющий вход с управляющего вычислительного устройства 7 подается соответствующий сигнал. В течение
состоит в том, что из предполагаемое статистических характеристик ожидаемого изменяющегося во времени изме l.J ос д;-1 вующее
.из уравнений (1), т.е. уравнению при
m 1
PQC. Т„,-М, X),
первого этапа последовательно после
Q - V Vi 4oT.,.Mjx.
2)
Исходя из необходимого времени выполнения уставки устанавливают через дополнительные входы в блоке 6 постоянных множителей значения постоянных множителей q,-q, которые в процессе работы передаются в управляющее вычислительное устройство 7 и в умножитель 4. С учетом перечисленных исходных данных определяют необходимые значения опорных сигналов X оп,п и соответствующих им опорных
ОП.1
-т
ОП.П
ЗаГо с/г,™ГГг„
, млл 4t;i О
интервалов времени Т
tJMb 1 - ип-п
тем в течение каждого опорного интервала времени осуществляют измерительное преобразование соответствующего этому опорному интервалу опорнос источника 1
тельной системы 2. измерительный «-я- - ,::Zn:измерительного и опорных сигналов, управляемого управляющим вычислительным устройством 7, на вход измерительной системы 2, измерительный ,::Zn:типликативные погрешности и погрешности от нелинейности функции преобразования, последовательно поступают
опорные сигналы X -X
ОП.1
Каждый
из опооных
множитель q- . Множители q,-q|, поступают на вход умножителя 4 в виде дво- ичньк кодов с выхода блока 6 посто
;
числительного устройства 7 подается соответствующий сигнал. В течение
первого этапа последовательно после
преобразования опорных сигналов X
Ввиду того, что процесс уставки результата интегрирования выполняется несколькими опорными сигналами в течение соответствующих им опорных интервалов времени, а значения опорных сигналов и интервалов времени определяются через предварительно найденные приближенные значения статис- (2) (суммирование вьтолняется в самом ю тических характеристик измерительноОП,|
в измерительном канале измерительной системы 2, умножения в умножителе 4 их значений на соответствующие множители q; и прямого интегрирования с помощью интегратора 3 осуществляют суммирование результатов интегрирования в соответствии с уравнением
интеграторе 3). Полученный результат «
го сигнала - начальные моменты, связанные между собой системой уравнений (1), реализующих системньй метод исследования на базе обобщенных критериев точности, в способе измерения интегрального значения изменяющегося во времени измерительного сигнала обеспечивается инвариантность результата интегрирования к аддитивным, мультипликативным и от нелинейности функции преобразования в измерительном канале погрешностям, что позволяет резко повысить точность определения интегрального значения измерительного сигнала.
21Ч;Т„
X
ОПо
представ
ляет собой уставку. Значение этой уставки запоминается в самом интеграторе 3. На этом заканчивается первый этап работы устройства.
Необходимым условием для обеспечения инвариантности к аддитивным, мультипликативным погрешностям и погрешности линейности является соблюдение следующего соотношения:
on,i Х ОГ.,, 4.
Если оно по каким-либо причинам невыпол шмо, то при п 2 можно обеспечить инвариантность к аддитивным и мультипликативным погрешностям, для чего уставка задается прямым интегрированием одного опорного сигнала и инверсным 2. второго„ При этом
on.i или Х, i i п.
Во время второго этапа с источника 1 измерительного и опорных сигналов на вход измерительной системы 2 поступает изменяющийся во времени измерительный сигнал x(t). При этом с выходов управляющего вычислительного устройства 7 на управляющие входы ключа 5 и интегратора 3 поступают сигналы, которые соответственно замыкают ключ 5 и переводят интегратор 3 в режим инверсного интегрирования. Изменяющийся во времени измерительный сигнал, пройдя через измерительный канал измерительной системы 2, умножается в умножителе 4 на множитель q, поступающий с выхода блока 6 постоянных множителей, и интегрируется интегратором 3 до получения нулевого результата интегрирования. В момент получения нулевого результата интегрирования на выходе интегратора 3 получают сигнал, свидетельствующий о полном списании уставки результата интегрирования, т.е. о том, что результат интегрирования, изменяющегося во времени измерительного сигнала достиг значения, равного уставке.
0
5
0
5
5
го сигнала - начальные моменты, связанные между собой системой уравнений (1), реализующих системньй метод исследования на базе обобщенных критериев точности, в способе измерения интегрального значения изменяющегося во времени измерительного сигнала обеспечивается инвариантность результата интегрирования к аддитивным, мультипликативным и от нелинейности функции преобразования в измерительном канале погрешностям, что позволяет резко повысить точность определения интегрального значения измерительного сигнала.
Формула изобретения
Способ определения интегрального значения изменг(о.тегося во времени измерительного сигнала, основанный на поочередном прямом и инверсном интегрировании соответственно постоянного опорного и изменяющегося во времени измерительного сигналов и измерении интервала времени, в течение которого производится инверсное интегрирование, отличающийся тем, что, с целью повьшгения точности
Q путем обеспечения инвариантности интегрального значения к аддитивным, мультипликативным погрешностям и погрешностям линейности и позьтенкя быстродействия, задают опорные интервалы времени, в каждом опорном интервале времени производят измерительное преобразование соответствующего данному интервалу опорного сигнала, умножают преобразованный опорный сигнал на заданный множитель, интегрируют полученные значения и суммируют результаты интегрирования, затем осуществляют измерительное преобразование, умножение на постоянный множитель и
g инверсное интегрирование преобразованного измерительного сигнала до тех пор, пока общий результат интегрирования не станет равным нулю, причем значения постоянных опорных
5
0
Hmtt
Двпамштвлтив вхавы

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения интегрального значения изменяющегося во времени измерительного сигнала | 1987 |
|
SU1541635A1 |
| Способ коррекции функции преобразования измерительного преобразователя для интегрирующей системы | 1987 |
|
SU1531112A1 |
| СПОСОБ ВЫДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ТОКА КОРОТКОГО ЗАМЫКАНИЯ | 1992 |
|
RU2030052C1 |
| Компаратор формы сигналов | 1985 |
|
SU1257604A1 |
| Частотно-импульсное устройство преобразования сигнала с мостового датчика | 1986 |
|
SU1383474A1 |
| Коммутационный преобразователь электрической мощности | 1986 |
|
SU1348743A1 |
| Устройство для измерения и контроля нелинейности амплитудной характеристики квазилинейных систем | 1981 |
|
SU974298A1 |
| Устройство для измерения длительности импульса | 1989 |
|
SU1746357A1 |
| СПОСОБ СТАБИЛИЗАЦИИ И КОРРЕКТИРОВКИ КОЭФФИЦИЕНТА ПЕРЕДАЧИ СЦИНТИЛЛЯЦИОННОГО ДЕТЕКТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445648C2 |
| СПОСОБ МЕТРОЛОГИЧЕСКОГО ИСПЫТАНИЯ И АТТЕСТАЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК АЦП И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337475C1 |
Изобретение относится к информационно-измерительной технике и может быть использовано в измерительных системах, в которых измерительный сигнал интегрируется до заданного значения результата интегрирования. Целью изобретения является повышение точности путем обеспечения инвариантности интегрального значения к аддитивным, мультипликативным погрешностям и погрешности линейности измерительного канала и повьшение быстродействия. Для этого последовательно и разновременно выполняют, измерительное преобразование и интегрирование нескольких (не менее двух) опорных сигналов в течение соответствующих опорных интервалов времени, причем значения опорных сигналов и опорных интервало:в времени определяются из системы уравнений, характеризуемой полученной авторами матрицей, в которой значения опорных сигналов и опорных интервалов времени связаны с измерительным интервалом времени, в течение которого происходит интегрирование измерительного сигнала, и начальными моментами измерительного сигнала. Об интегральном значении изменяющегося во времени измерительного сигнала судят по времени инверсного интегрирования. 1 ил. § (Л 4 сд
| Авторское свидетельство СССР № 1157681, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для интегрирования частотно-импульсных сигналов | 1984 |
|
SU1160444A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Фиш М.Л | |||
| Химотронные приборы в автоматике.- Киев: Изд-во Технгка, с | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
