Изобретение относится к вибрационной технике и может быть использовано в устройствах для возбуждения колебаний,
Цель изобретения - повышение надежности за счет снижения нагрузок по осям дебалансных сателлитов.
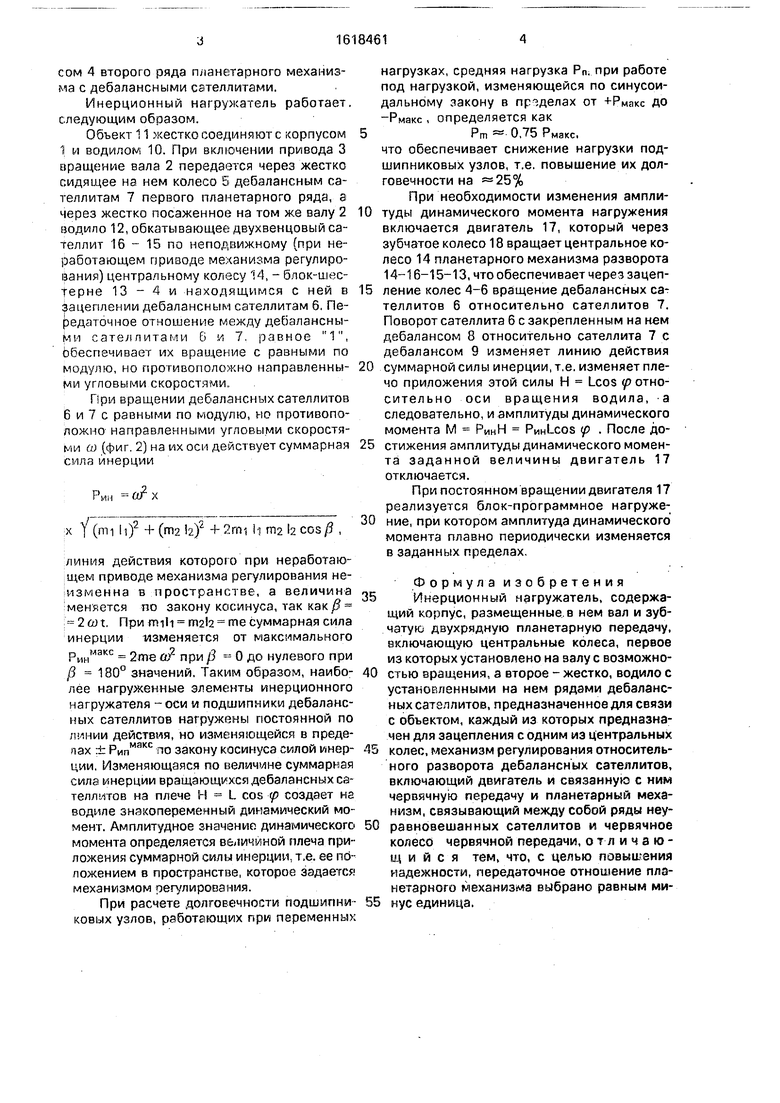
На фиг. 1 представлена кинематическая схема инерционного нагружателя; на фиг. 2 - динамическая расчетная схема инерционного нагружателя.
Инерционный нагружатель содержит корпус 1, размещенные в нем вал 2, связанный с приводом 3, зубчатую двухрядную планетарную передачу с дебалансными сателлитами и механизм регулирования относительно углового положения дебалансных сателлитов. Зубчатая двухрядная планетарная передача включает центральные колеса, первое 4 из которых установлено на валу 2 с возможностью вращения, а второе 5 - жестко. Центральные колеса 4 и 5 имеют одинаковые числа зубьев и находятся в зацеплении соответственно с сателлитами 6 и 7, на которых закреплены дебалансы 8 и 9, симметрично установленные на водиле 10,
жестко связанном с объектом 11. Сателлиты 6 и 7 имеют равные числа зубьев и кинематически через центральные колеса 4 и 5 связаны между собой планетарным механизмом, включающим водило 12, центральные колеса 13 и 14 и двухвенцовый сателлит 15 - 16с отрицательным передаточным отношением
И2.1814
ZiaZi6
Zl3-Zl6 Zl4Zl5
- 1
Механизм регулирования относительного разворота дебалансных сателлитов включает в себя двигатель 17, связанную С ним червячную передачу, ведомое колесо 18 которой свободно установлено на валу 2 и жестко связано с центральным колесом 14 планетарного механизма регулирования, водило 12 которого жестко закреплено на валу 2, на водиле 12 установлены двухвен- цовые сателлиты, один венец 16 которых находится в зацеплении с центральным колесом 14, а второй венец 15 - с колесом 13, жестко соединенным с центральным колеа ь а
сом 4 второго ряда планетарного механизма с дебалансными сателлитами.
Инерционный нагружатель работает. следующим образом.
Объект 11 жестко соединяют с корпусом 1 и водилом 10. При включении привода 3 вращение вала 2 передается через жестко сидящее на нем колесо 5 дебалансным сателлитам 7 первого планетарного ряда, а через жестко посаженное на том же валу 2 водило 12, обкатывающее двухвенцовый сателлит 16 - 15 по неподвижному (при неработающем приводе механизма регулирования) центральному колесу 14, - блок-шестерне 13 - 4 и находящимся с ней в зацеплении дебалансным сателлитам 6. Передаточное отношение между дебалансными сателлитами 6 и 7, равное 1, обеспечивает их вращение с равными по модулю, но противоположно направленными угловыми скоростями.
При вращении дебалансных сателлитов 6 и 7 с равными по модулю, но противоположно направленными угловыми скоростями со (фиг. 2) на их оси действует суммарная сила инерции
Рин
I---------------------------------------------------;------------------------------™--.----------------------
х У (mi И)2 .4- (ma la)2 + 2mi h ma la cos/ ,
линия действия которого при неработающем приводе механизма регулирования неизменна в пространстве, а величина меняется по закону косинуса, так как / 2 0)t. При miH mala me суммарная сила инерции изменяется от максимального
Ринмакс 2те о при / 0 до нулевого при {$ 180° значений. Таким образом, наиболее нагруженные элементы инерционного нагружателя -оси и подшипники дебалансных сателлитов нагружены постоянной по линии действия, но изменяющейся в пределах ± Рипмакс по закону косинуса силой инерции. Изменяющаяся по величине суммарная сила инерции вращающихся дебалансных сателлитов на плече Н L cos создает на водиле знакопеременный динамический момент. Амплитудное значение динамического момента определяется величиной плеча приложения суммарной силы инерции, т.е. ее по- ложением в пространстве, которое задается механизмом регулирования.
При расчете долговечности подшипниковых узлов, работающих при переменных
нагрузках, средняя нагрузка Рщ при работе под нагрузкой, изменяющейся по синусоидальному закону в пределах от +РМакс до -Рмакс, определяется как Рт « OJ5 Рмакс,
что обеспечивает снижение нагрузки подшипниковых узлов, т.е. повышение их долговечности на «25%
При необходимости изменения амплитуды динамического момента нагружения включается двигатель 17, который через зубчатое колесо 18 вращает центральное колесо 14 планетарного механизма разворота 14-16-15-13,что обеспечивает череззацепление колес 4-6 враЧцение дебалансных сателлитов 6 относительно сателлитов 7. Поворот сателлита 6 с закрепленным на нем дебалансом 8 относительно сателлита 7 с дебалансом 9 изменяет линию действия
суммарной силы инерции, т.е. изменяет плечо приложения этой силы Н Lcos p отно- сительно оси вращения водила, -а следовательно, и амплитуды динамического момента М РинН PMHLcos f . После достижения амплитуды динамического момента заданной величины двигатель 17 отключается.
При постоянном вращении двигателя 17 реализуется блок-программное нагружение, при котором амплитуда динамического момента плавно периодически изменяется в заданных пределах.
Формула и зоб рете ни я
Инерционный нагружатель, содержащий корпус, размещенные, в нем вал и зубчатую двухрядную планетарную передачу, включающую центральные колеса, первое из которых установлено на валуе возможностью вращения, а второе - жестко, водило с установленными на нем рядами дебалансных сателлитов, предназначенное для связи с объектом, каждый из которых предназначен для зацепления с одним из центральных
колес, механизм регулирования относительного разворота дебалансных сателлитов, включающий двигатель и связанную с ним червячную передачу и планетарный механизм, связывающий между собой ряды неуравновешанных сателлитов и червячное колесо червячной передачи, отличающийся тем, что, с целью повышения надежности, передаточное отношение планетарного механизма выбрано равным минус единица.
77
16 15
- Т .. ..
иш
-
г
) .---.Ч
TTAl
п
12 131+ Фиг. 1
I
v f:
10
Р
УХУ/
1 5
. 1
II
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный нагружатель | 1986 |
|
SU1384346A1 |
| Стенд усталостных испытаний | 1989 |
|
SU1758486A1 |
| Инерционный нагружатель | 1988 |
|
SU1623790A1 |
| Импульсный нагружатель | 1987 |
|
SU1454516A1 |
| Импульсный нагружатель | 1986 |
|
SU1384345A1 |
| Вибрационный механизм вальца дорожного катка с регулировкой вынуждающей силы | 2023 |
|
RU2805708C1 |
| Вибровозбудитель | 1989 |
|
SU1692669A1 |
| Инерционный нагружатель стенда усталостных испытаний | 1985 |
|
SU1269856A1 |
| Устройство для возбуждения крутильных колебаний | 1987 |
|
SU1653861A1 |
| Инерционный нагружатель стенда усталостных испытаний | 1985 |
|
SU1261723A1 |
| Импульсный нагружатель | 1986 |
|
SU1384346A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
