1
(21)4653795/28
(22)20.02.89
(46) 30.08.92. Бюл. № 32
(71)Центральный научно-исследовательский институт материаловедения и Челябинский государственный технический университет
(72)П.Г.Виницкий, В.В.Воробей и И.Г.Мишин
(56)Авторское свидетельство СССР № 1454516, кл. В 06 В 1/16, 1987.
(54) СТЕНД УСТАЛОСТНЫХ ИСПЫТАНИЙ
(57)Изобретение относится к области вибрационной техники и может быть использовано в устройствах для возбуждения колебаний. Целью изобретения является расширение функциональных возможностей за счет обеспечения как постоянной амплитуды, так и плавной независимой регулировки величин минимальной и максимальной амплитуд динамической нагрузки.
расширения диапазона регулирования продолжительности периода блока программ и обеспечения реализации программ с фиксированным числом циклов нагружения в блоках, а также обеспечения плапного непрерывного изменения амплитуд динамической нагрузки по заданному закону. Для достижения поставленной цели в устройстве, содержащим планетарные ряды с неуравновешенными сателлитами, центральные зубчатые колеса каждого ряда выполнены двухвенцовыми с одинаковым числом зубьев в каждом венце, которые связаны между собой червячной передачей, центральные двухвенцовые колеса каждой ступени нагружателя кинематически связаны между собой посредством соответствующего планетарного ряда, передаточные отношения от привода к неуравновешенным сателлитам каждого ряда равны, а механизм регулирования выполнен в виде системы шарниров Гука. 2 з.п. ф-лы, 5 ил.


| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный нагружатель стенда усталостных испытаний | 1985 |
|
SU1269856A1 |
| Инерционный нагружатель | 1988 |
|
SU1618461A1 |
| Инерционный нагружатель | 1988 |
|
SU1623790A1 |
| Стенд для испытания редукторов с коаксиальными валами | 1985 |
|
SU1328703A2 |
| Импульсный нагружатель | 1987 |
|
SU1454516A1 |
| Стенд для испытания зубчатых колес | 1983 |
|
SU1132169A1 |
| ВЫСОКОМОМЕНТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 2007 |
|
RU2347966C1 |
| Импульсный нагружатель | 1986 |
|
SU1384346A1 |
| ПРИВОД ПОВОРОТНОГО ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2190144C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
Изобретение относится к вибрационной технике и может быть использовано в устройствах для возбуждения колебаний.
Наиболее близким к предлагаемому является стенде инерционным нагружателем. содержащий раму, установленный на ней инерционный нагружатель, включающий зубчатую передачу, выполненную в виде четырех попарно кинематически связанных между собой планетарных рядов с неуравновешенными сателлитами, образующих две независимые ступени с общим водилом и связанных с соответствующими ступенями, приводы и механизм регулирования.
Недостатками этого устройства является невозможность целенаправленного регулирования без переборки системы максимальной и минимальной амплитуд нагружения в блоке программ; невозможность изменения формы блоков программы, невозможность имитации нормального закона распределения амплитуд нзгружения; ограничение диапазона регулирования продолжительностью периода блока программы минимальными и максимальными оборотами привода механизма регулирования.
Цель изобретения - расширение функциональных возможностей стенда за счет обеспечения как постоянной амплитуды, так и плавной независимой регулировки зе- личин минимальной и максимальной амплитуд динамической нагрузки; расширение
-ч ел
00
диапазона регулирования продолжительности периода блока программы и обеспечение плавного изменения амплитуды нагрузки.
Поставленная цель достигается тем, что на стенде усталостных испытаний, содержащем раму, установленный на ней инерционный нагружатель, включающий зубчатую передачу, выполненную в виде четырех попарно кинематически связанных между собой планетарных рядов с неуравновешенными сателлитами, образующих две независимые ступени с общим водилом и связанных с соответствующими ступенями приводов и механизмов регулирования, центральные зубчатые колеса каждою ряда выполнены двухвенцовыми с одинаковым числом зубьев в каждом венце. стенд снабжен червячными передачами, установленными каждая на центральном колесе соответствующего планетарного ряда и связывающими венцы двухвенцовых колес соответствующих рядов, каждый из венцов которых предназначен для зацепления с половиной неуравновешенных сателлитов соответствующего ряда при их симметричном расположении по окружности: центральные двухвенцовые колеса каждой ступени нагружзтеля кинематически связаны между собой посредством соответствующего планетарного ряда, а передаточные отношения от привода к неуравновешенным сателлитам каждого ряда равны; механизм регулирования выполнен в виде системы шарниров Гука.
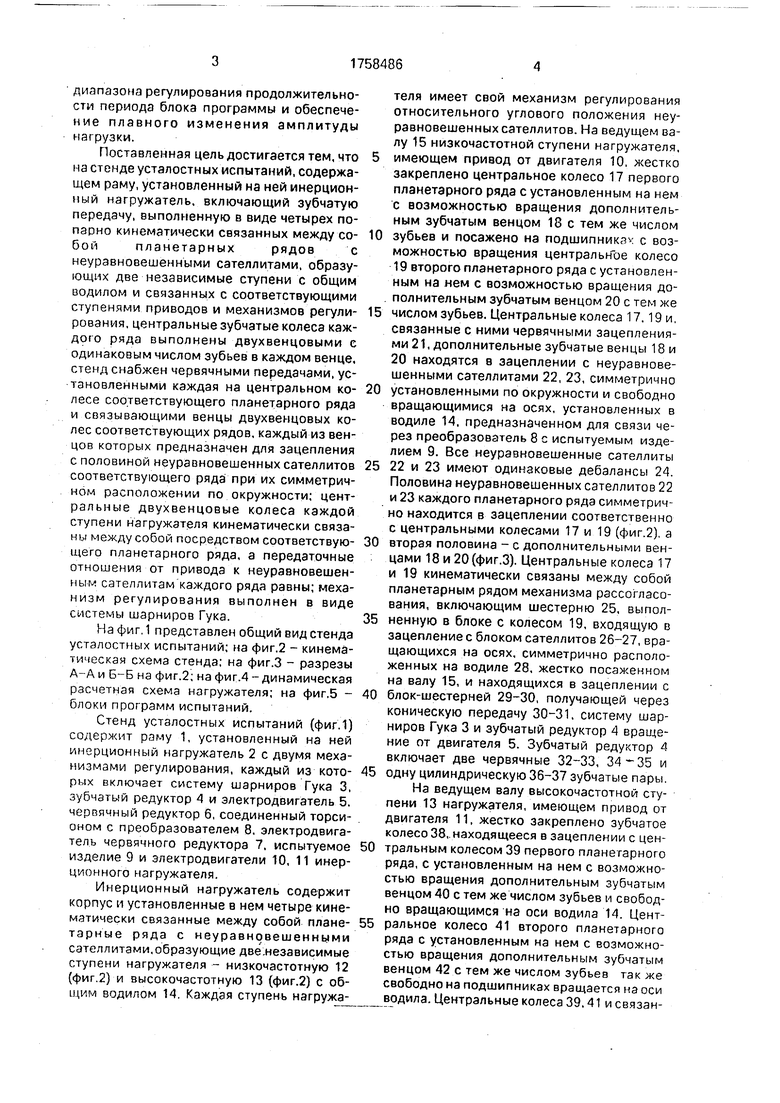
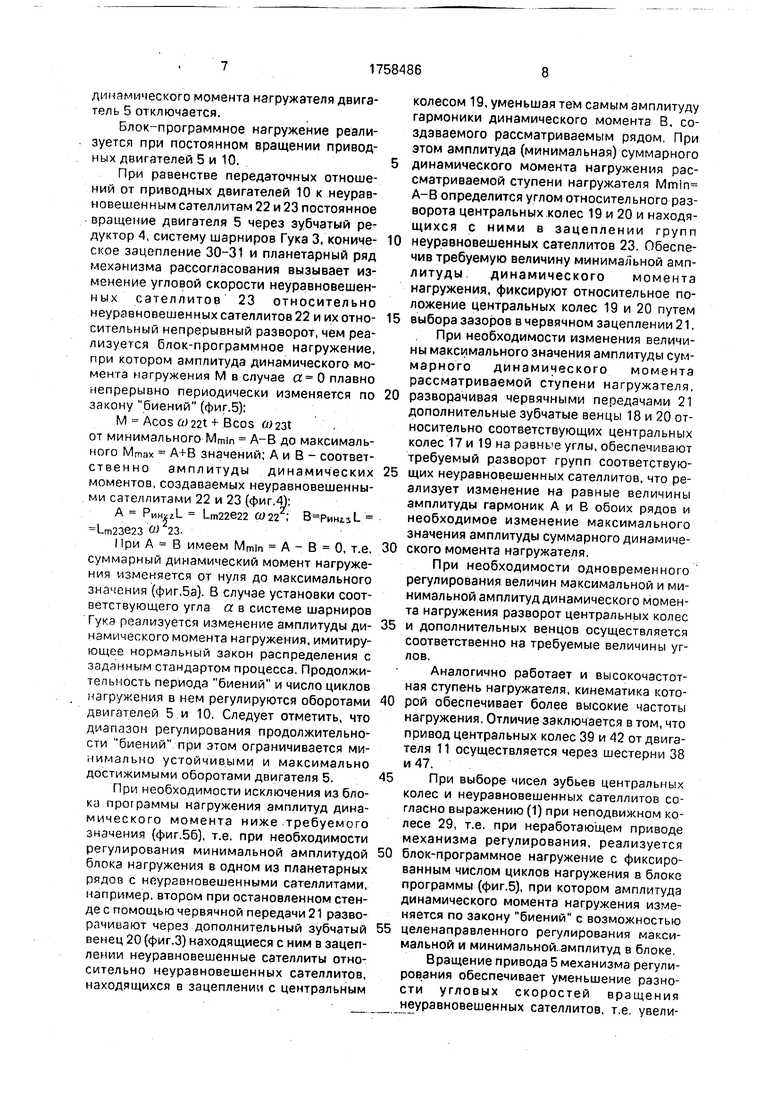
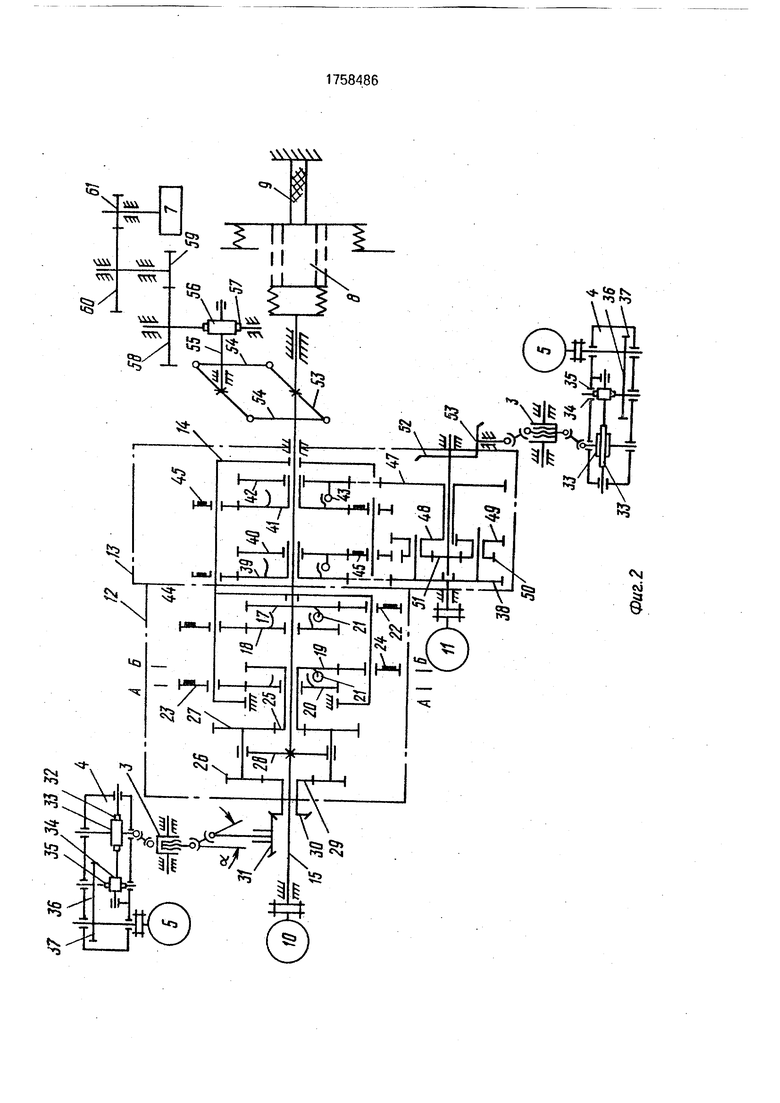
На фиг. 1 представлен общий вид стенда усталостных испытаний; на фиг.2 - кинематическая схема стенда; на фиг.З - разрезы А-А и Б-Б на фиг.2; на фиг.4 - динамическая расчетная схема нагружателя; на фиг.5 - блоки программ испытаний.
Стенд усталостных испытаний (фиг.1) содержит раму 1, установленный на ней инерционный нагружатель 2 с двумя механизмами регулирования, каждый из которых включает систему шарниров Гука 3, зубчатый редуктор 4 и электродвигатель 5. червячный редуктор 6, соединенный торси- оном с преобразователем 8. электродвигатель червячного редуктора 7, испытуемое изделие 9 и электродвигатели 10, 11 инерционного нагружателя.
Инерционный нагружатель содержит корпус и установленные в нем четыре кинематически связанные между собой планетарные ряда с неуравновешенными сателлитами, образующие две .независимые ступени нагружателя - низкочастотную 12 (фиг.2) и высокочастотную 13 (фиг.2) с общим водилом 14. Каждая ступень нагружателя имеет свой механизм регулирования относительного углового положения неуравновешенных сателлитов. На ведущем валу 15 низкочастотной ступени нагружателя,
имеющем привод от двигателя 10, жестко закреплено центральное колесо 17 первого планетарного ряда с установленным на нем с возможностью вращения дополнительным зубчатым венцом 18 с тем же числом
0 зубьев и посажено на подшипника с возможностью вращения центральное колесо
19второго планетарного ряда с установленным на нем с возможностью вращения дополнительным зубчатым венцом 20 с тем же
5 числом зубьев. Центральные колеса 17,19 и, связанные с ними червячными зацеплениями 21, дополнительные зубчатые венцы 18 и
20находятся в зацеплении с неуравновешенными сателлитами 22, 23, симметрично
0 установленными по окружности и свободно вращающимися на осях, установленных в водиле 14, предназначенном для связи через преобразователь 8 с испытуемым изделием 9. Все неуравновешенные сателлиты
5 22 и 23 имеют одинаковые дебалансы 24. Половина неуравновешенных сателлитов 22 и 23 каждого планетарного ряда симметрично находится в зацеплении соответственно с центральными колесами 17 и 19 (фиг.2), а
0 вторая половина - с дополнительными венцами 18 и 20(фиг.З). Центральные колеса 17 и 19 кинематически связаны между собой планетарным рядом механизма рассогласования, включающим шестерню 25, выпол5 ненную в блоке с колесом 19, входящую в зацепление с блоком сателлитов 26-27, вращающихся на осях, симметрично расположенных на водиле 28, жестко посаженном на валу 15, и находящихся в зацеплении с
0 блок-шестерней 29-30, получающей через коническую передачу 30-31. систему шарниров Гука 3 и зубчатый редуктор 4 вращение от двигателя 5. Зубчатый редуктор 4 включает две червячные 32-33, 34-35 и
5 одну цилиндрическую 36-37 зубчатые пары. На ведущем валу высокочастотной ступени 13 нагружателя, имеющем привод от двигателя 11, жестко закреплено зубчатое колесо 38, находящееся в зацеплении с цен0 тральным колесом 39 первого планетарного ряда, с установленным на нем с возможностью вращения дополнительным зубчатым венцом 40 с тем же числом зубьев и свободно вращающимся на оси водила 14. Цент5 ральное колесо 41 второго планетарного ряда с установленным на нем с возможностью вращения дополнительным зубчатым венцом 42 с тем же числом зубьев так же свободно на подшипниках вращается на оси водила. Центральные колеса 39.41 и связанные с ними червячными зацеплениями 43 дополнительные зубчатые венцы 40 и 42 находятся в зацеплении с неуравновешенными сателлитами 44 и 45, симметрично установленными по окружности и свободно вращающимися на осях, установленных в водиле 14. Все неуравновешенные сателлиты 44 и 45 имеют одинаковые дебалансы 46. Половина неуравновешенных сателлитов 44 и 45 каждого планетарного ряда симметрично находится в зацеплении соответственно с центральными колесами 39 и 41, вторая половина - с зубчатыми венцами 40 и 42 аналогично фиг.З. Центральные колеса 39 и 41 кинематически связаны между собой планетарным рядом механизма рассогласования, включающим блок-шестерню 47-48 один венец которой 47 входит в зацепление с центральным колесом 42, а второй венец 48 зацепляется с блоком сателлитов 49-50, вращающихся на осях, симметрично установленных на колесе 38, и входящих в зацепление с блок-шестерней 51-52, получающей вращение через коническую передачу 52-53, систему шарниров Гука 3 и зубчатый редуктор 4 от двигателя 5,
Испытуемое изделие через преобразователь 8, двуплечий рычаг 53, жестко закрепленный на водиле 14, шатуны 54, упругий вал-торсион 55. червячную пару 56- 57 и два зубчатых зацепления 58-59, 60-61 нагружается двигателем 7.
Числа зубьев центральных колес и неуравновешенных сателлитов каждой ступени нагружателя могут быть выбраны из соотношения
0)(2)
м .- ч . .с . ч ,- -.m
0) (2) (X) (0
77771
Лц i-cЈ-W -С ПЛ
N - число циклов нагружения в блоке программы за период изменения амплитуды динамического момента нагружения между ее минимальными значениями; Zu 1 , - числа зубьев центрального колеса и неуравновешенных сателлитов первого ряда рассматриваемой ступени нагружения; 2Ц , Z/2 - числа зубьев центрального колеса и неуравновешенных сателлитов второго ряда рассматриваемой ступени нагружателя; пл - передаточное отношение планетарного ряда, связывающего оба центральных ко- леса рассматриваемой ступени нагружателя.
Стенд усталостных испытаний работает следующим образом,
Инерционный нагружатель 2 создает на водиле 14 знакопеременный нагружающий момент (см. ниже). При подсоединении испытуемого изделия 9 непосредственно к водилу 14 реализуются испытания на кручение. При подсоединении испытуемого изде- лия к водилу нагружателя через преобразователь 8, как показано на фиг 1, 5 реализуются испытания на растяжение- сжатие.
Червячный редуктор 6 создает через торсион 55, двуплечие рычаги 53 и шатуны постоянное усилие на испытуемом изделии
0 9.
Работа обоих ступеней нагружателя аналогична, поэтому рассмотрим работу одной, например, низкочастотной ступени 12. Режим моногармонического нзгруже5 ния обеспечивается при неработающем механизме регулирования.
Ротор двигателя 10 приводит во вращение через вал 15 центральное колесо 17с
0 дополнительным венцом 18 и водило 28 механизма рассогласования, которое через блок сателлитов 26-27, обкатывающихся по неподвижному колесу 29, обеспечивает вращение центральной блок-шестерни 25-19 с
5 дополнительным венцом 20. Вращение центральных колес вызывает вращение находящихся с ними в зацеплении неуравновешенных сателлитов 22 и 23 с равными угловыми скоростями м , чем
0 обеспечивается создание на их осях постоянной по величине суммарной силы инерции (фиг.4).
35
Рин (т22б22)2 Кт2362з)2 + 2гП22е22ГП23е23С05 ft
плечо приложение которой Н Lcos p Lcos an при неработающем приводе регулирования изменяется по косинусоидаль- ному закону. р ал; t - текущее время,
0 ГП22. 622, Ш23. 623 - соответственно массы и эксцентриситеты неуравновешенных сателлитов 22 и 23; ft- угол разворота неуравновешенных сателлитов 22 первого ряда относительно сателлитов 23 второго ряда 5 задается механизмом регулирования.
Таким образом, рассматриваемая ступень нагружения создает на оси водила 14 знакопеременный динамический момент нагружения.
0 При необходимости изменения амплитуды динамического момента нагружения включается двигатель 5, который через зубчатый редуктор 4. систему шарниров Гука 3, коническую передачу 31-30 и планетарный
5 механизм рассогласования 29-26-27-25 создает дополнительное вращение колеса 19с венцом 20. что обеспечивает изменение величины угла/ , т.е. изменение динамического момента нагружателя. После достижения заданного значения амплитуды
динамического момента нагружателя двигатель 5 отключается.
Блок-программное нагружение реализуется при постоянном вращении приводных двигателей 5 и 10.
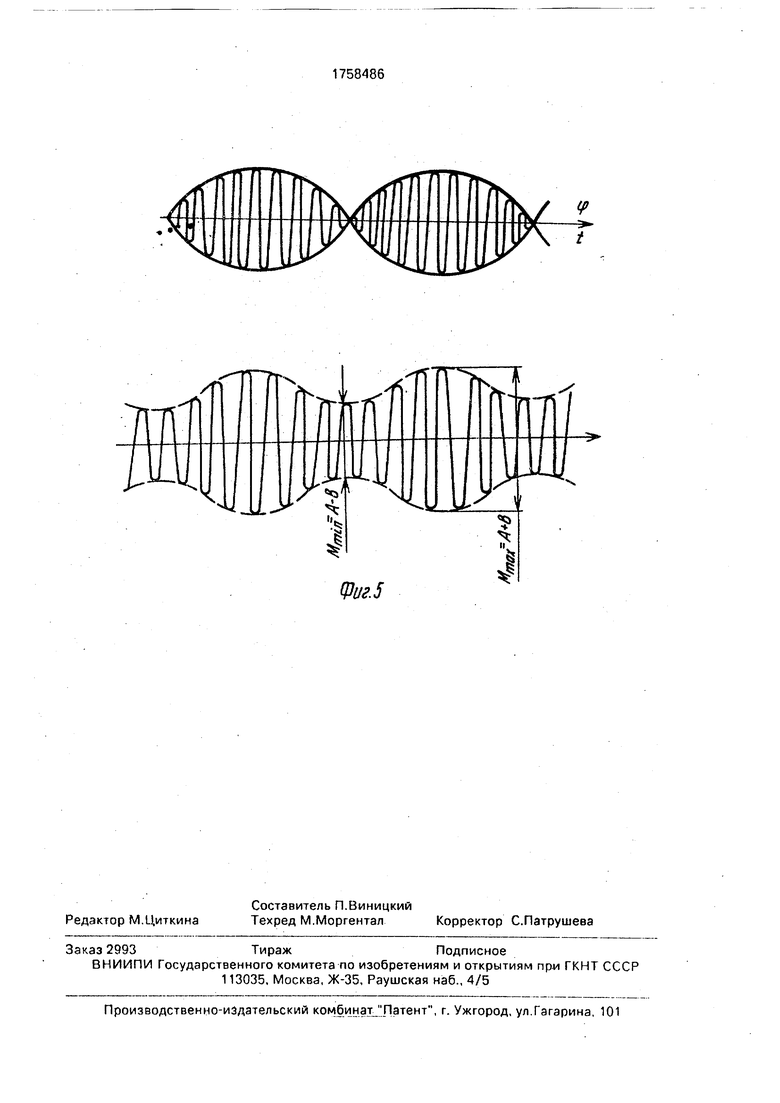
При равенстве передаточных отношений от приводных двигателей 10 к неуравновешенным сателлитам 22 и 23 постоянное вращение двигателя 5 через зубчатый редуктор 4, систему шарниров Гука 3, коническое зацепление 30-31 и планетарный ряд механизма рассогласования вызывает изменение угловой скорости неуравновешен- ных сателлитов 23 относительно неуравновешенных сателлитов 22 и их относительный непрерывный разворот, чем реализуется блок-программное нагружение, при котором амплитуда динамического момента иагружения М в случае а 0 плавно непрерывно периодически изменяется по закону биений (фиг.5):
М ACOS + BCOS 0)231
от минимального Mmm - А-В до максимального Mmax Af В значений; А и В - соответ- ственно амплитуды динамических моментов, создаваемых неуравновешенными сателлитами 22 и 23 (фиг.4):
А Lm22e22 CO 22 , В ринц1 Lm23e 3 О 2311ри А В имеем Mmin А - В 0, т.е. суммарный динамический момент нагружения изменяется от нуля до максимального значения (фиг.5а). В случае установки соответствующего угла а в системе шарниров Гукэ реализуется изменение амплитуды динамического момента нагружения, имитирующее нормальный закон распределения с заданным стандартом процесса. Продолжительность периода биений и число циклов нагружения в нем регулируются оборотами двигателей 5 и 10. Следует отметить, что диапазон регулирования продолжительности биений при этом ограничивается минимально устойчивыми и максимально достижимыми оборотами двигателя 5.
При необходимости исключения из блоки программы нагружения амплитуд динамического момента ниже требуемого значения (фиг.56), т.е. при необходимости регулирования минимальной амплитудой блока нагружения в одном из планетарных рядов с неуравновешенными сателлитами, например, втором при остановленном стенде с помощью червячной передачи 21 разворачивают через дополнительный зубчатый венец 20 (фиг.З) находящиеся с ним в зацеплении неуравновешенные сателлиты относительно неуравновешенных сателлитов, находящихся в зацеплении с центральным
колесом 19, уменьшая тем самым амплитуду гармоники динамического момента В, создаваемого рассматриваемым рядом При этом амплитуда (минимальная) суммарного
динамического момента нагружения рассматриваемой ступени нагружателя Mmln А-В определится углом относительного разворота центральных колес 19 и 20 и находящихся с ними в зацеплении групп
0 неуравновешенных сателлитов 23 Обеспечив требуемую величину минимальной амп- литуды динамического момента нагружения, фиксируют относительное положение центральных колес 19 и 20 путем
5 выбора зазоров вчервячном зацеплении 21. При необходимости изменения величины максимального значения амплитуды суммарного динамического момента рассматриваемой ступени нагружателя,
0 разворачивая червячными передачами 21 дополнительные зубчатые венцы 18 и 20 относительно соответствующих центральных колес 17 и 19 на равные углы, обеспечивают требуемый разворот групп соответствую5 щих неуравновешенных сателлитов, что реализует изменение на равные величины амплитуды гармоник А и В обоих рядов и необходимое изменение максимального значения амплитуды суммарного динамиче0 ского момента нагружателя.
При необходимости одновременного регулирования величин максимальной и минимальной амплитуд динамического момента нагружения разворот центральных колес
5 и дополнительных венцов осуществляется соответственно на требуемые величины углов.
Аналогично работает и высокочастотная ступень нагружателя, кинематика кото0 рой обеспечивает более высокие частоты нагружения. Отличие заключается в том, что привод центральных колес 39 и 42 от двигателя 11 осуществляется через шестерни 38 и 47.
5 При выборе чисел зубьев центральных колес и неуравновешенных сателлитов согласно выражению (1) при неподвижном колесе 29, т.е. при неработающем приводе механизма регулирования, реализуется
0 блок-программное нагружение с фиксированным числом циклов нагружения в блоке программы (фиг.5), при котором амплитуда динамического момента нагружения изменяется по закону биений с возможностью
5 целенаправленного регулирования максимальной и минимальной амплитуд в блоке
Вращение привода 5 механизма регулирования обеспечивает уменьшение разности угловых скоростей вращения неуравновешенных сателлитов, т е увеличение продолжительности периода биений, При вращении привода 5 со скоростью, обеспечивающей равенство угловых скоростей вращения неуравновешенных сателлитов 22 и 23, амплитуда динамического момента рассматриваемой ступени нагру- жателя неизменна, т.е. продолжительность периода блока программы равна бесконечности.
Таким образом, при выборе чисел зубь- ев центральных колес и неуравновешенных сателлитов согласно выражению (1) реализуется практически любой диапазон изменения продолжительности периода блока программы нагружения, вплоть до периода равного бесконечности.
Изменением угла а системы шарниров Гука при работе привода 5 реализуется требуемый характер изменения амплитуды динамического момента нэгружения.
Совместная работа обеих ступеней на- гружателя реализует полигармоническое блок-программное нагружение.
Формула изобретения
Ю, 7 3расширения функциональных возможностей путем обеспечения как постоянной амплитуды, так и плавной независимой регулировки величин минимальной и максимальной амплитуд динамической нагрузки, центральные зубчатые колеса каждого ряда выполнены двухвенцовыми с одинаковым числом зубьев в каждом венце, стенд снабжен червячными передачами, установленными каждая на центральном колесе соответствующего планетарного ряда и связывающими двухзенцовые колеса соответствующих рядов, каждый из венцов которых предназначен для зацепления с половиной неуравновешенных сателлитов соответствующего ряда в момент их симметричного расположения по окружности.
Ht xrrfl
f-J
4 J
«. ИЗ
- i1
А А
23
Фиг.4
6-6
23
Фиг.3
Фиг. 5
