Контроль полноты передвижки каждой секции крепи на полную величину шага является необходимым условием для нормальной эксплуатации механизированных крепей в угольных шахтах.
Известные сп особы такого контроля основаны на применении многопроводной схемы сигнализации, которая требует большого количества медных проводов, загромождаюш,их проходы в крепи и создаюш,их неудобства при эксплуатации.
Предлагаемый способ контроля полноты передвижки секций механизированной шахтной крепи не имеет этих недостатков. Способ отличается от известных тем, что вместо дмногопроводной схемы сигнализации применена схема с использованием индуктивных датчиков и бесконтактных телемеханических устройств, причем сигналы о положении секций крепи передаются на пульт оператору с помощью феррит-диодных ячеек.
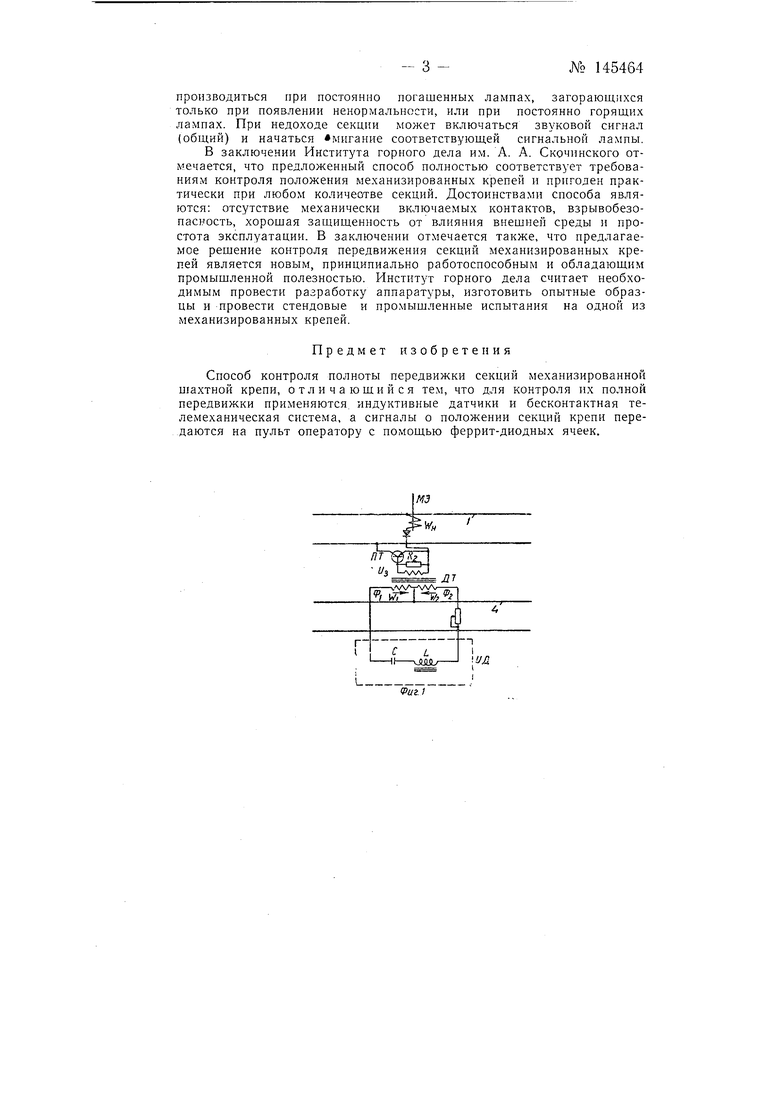
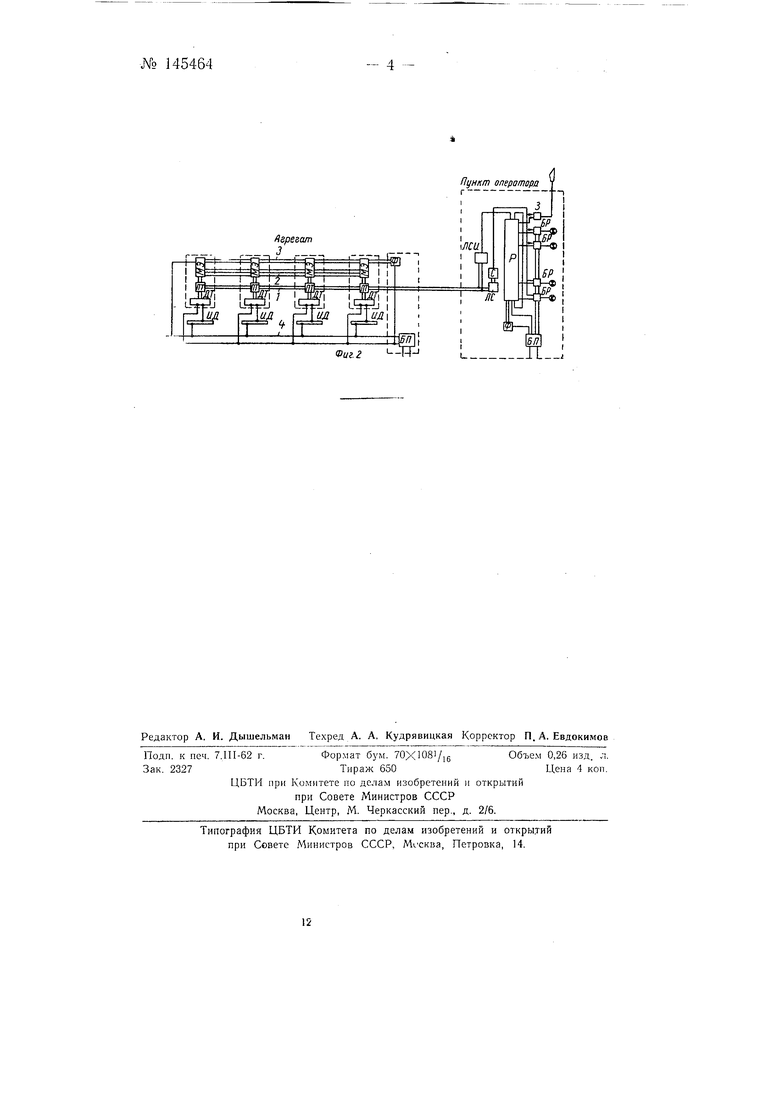
На фиг. 1 показана электрическая схема установки индуктивного датчика на одной из секций крепи; на фиг. 2 - блок-схема предлагаемого способа контроля.
На схемах обозначены: / - провода для передачи сигнализации; 2 - провода для внутренней связи; 5 - провода для посылки продвигающих импульсов; 4 - провода для питания; ЯД - индуктивные датчики; МЭ - комплекты, состоящие из двух магнитных элементов и двух диодов связи; ПТ - полупроводниковые триоды, представляющие собой бесконтактные ключи датчиков; W „ - нагрузочная обмотка магнитного элемента; ДГ - дифференциальный трансформатор; Ф - формирователь импульсов движения; ЛС - линейный блок передачи сигналов; ЛСИ - линейный блок передачи синхронизирующего импульса; С - схемы совпадений; Р - бесконтактный распределитель пункта оператора, выполненный на таких же магнитных элементах, что и
Al 145464- -2МЭ; БР - бесконтактные реле, управляющие индикаторами (лампами и пр.); 3-блок, включающий звуковой сигнал недохода секции (общий для всей установки); БП - блок питания.
Основание каждой секции крепи снабжается индуктивным датчиком. На выдвижной части крепи расположен якорь датчика, которым может служить один из конструктивных элементов секции. В выдвинутом положении якорь замыкает магнитный поток датчика, не доходя до полюсов магнитопровода на 1-2 см, при этом .происходит изменение тока, которое используется для переворота фазы напряжения на выходной обмотке дифференциального трансформатора ДТ. Магнитные потоки входных обмоток Wi и W2 действуют навстречу друг другу. При положении датчика соответствующем больщому току, поток обмотки Wi преобладает над потоком обмотки Wz и напряжение на выходе имеет фазу соответствующую фазе потока f/s. При малом токе датчика преобладает поток 02 и напряжение Ид меняет свою фазу на обратную. Переворот фазы напряжения f/s приводит к открыванию бесконтактного ключа, который в открытом положении пропускает в линию связи сигналы от генератора импульсов. При неперевернутой фазе напряжения Ug триод закрыт и сигналы не проходят. Открывание ключа про сходит в том случае, когда секция выдвигается полностью и якорь доходит до магнитопровода датчика. Точность контроля выполнения хода может регулироваться и составлять в зависимости от необходимости и условий работы крепи 1 см и больще
Для передачи к оператору сигналов контроля крайних положений секций крепи используют бесконтактную, телесигнализацию с временным разделением, построенную на применении феррит-диодных ячеек. Источником импульса вьшускае.мого в линию связи бесконтактным ключом датчика служит нагрузочная обмотка W магнитного элемента. Источником продвигающих импульсов служит сеть переменного тока, от которой через формирователь Ф импульсов питаются обмотки движения передающих элементов и элементов распределителя приемного устройства.
Узлы МЭ, ПТ и ДТ монтируются в одной оболочке блока секции. Блок секции имеет взрывобезопасное исполнение.
Корпус датчика выполняется из немагнитного материала и его полость заливается изоляционной мастикой. Датчик пригоден для применения в щахтах, опасных по газу и пыли.
Все узлы (за иключением звукового сигнала), указанные на пункте оператора и обведенные пунктирной линией, размещаются в одном аппарате контроля, также имеющем взрывобезопасное исполнение.
На цервой секции в отдельной оболочке размещается блок питания и формирователь импульсов.
Между блоками секций прокладывается 9 проводов: два для передачи сигнализации, три для внутренней связи, два для посылкр продвигающих импульсов и два для питания. Напряжение питания 36 в, 50 гц. Максимальный ток одного датчика 0,2 а. Так как нормально половина всех секций агрегата вдвинута, а половина выдвинута, средний ток датчика будет 0,15 а.
Максимальное допустимое расстояние от крепи до оператора при кабеле типа ТВШ может составлять до 6 км.
На аппарате контроля индикация положения секций может быть произведена различными способами: одной сигнальной лампой (погащена, зажжена), двумя лампами разного цвета, стрелочным прибором, записью на многоперьевом самописце. Сигнализация может
производиться при постоянно погашенных лампах, загорающихся только при появлении ненормальности, или при постоянно горящих лампах. При недоходе секции может включаться звуковой сигнал (общий) и начаться «мигание соответствующей сигнальной лампы. В заключении Института горного дела им. А. А. Скочинского отмечается, что предложенный способ полностью соответствует требованиям контроля положения механизированных крепей и пригоден практически при любом количестве секций. Достоинствами способа являются: отсутствие механически включаемых контактов, взрывобезопасность, хорошая защищенность от влияния внещией среды и простота эксплуатации. В заключении отмечается также, что предлагаемое рещение контроля передвижения секций механизированных крепей является новым, принципиально работоспособным и обладающим промышленной полезностью. Институт горного дела считает необходимым провести разработку аппаратуры, изготовить опытные образцы и провести стендовые и промышленные испытания на одной из механизированных крепей.
Предмет изобретения
Способ контроля полноты передвижки секций механизированной шахтной крепи, отличающийся тем, что для контроля их полной передвижки применяются, индуктивные датчики и бесконтактная телемеханическая система, а сигналы о положении секций крепи передаются на пульт оператору с помощью феррит-диодных ячеек.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ТЕЛЕМЕХАНИКИ ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖКОЙ СЕКЦИИ ШАХТНОЙ ГИДРОКРЕПИ | 1969 |
|
SU245710A1 |
| Способ автоматического поддерживания прямолинейности в плоскости пласта шахтных механизированных крепей | 1967 |
|
SU450892A1 |
| УСТРОЙСТВО КОНТРОЛЯ линии связи | 1972 |
|
SU341171A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ МЕХАНИЗИРОВАННОЙ КРЕПИ ОЧИСТНОГО АГРЕГАТА | 1965 |
|
SU173183A1 |
| Устройство для контроля исправностиавтоматических установок с дублиро-ванием каналов | 1968 |
|
SU508860A1 |
| Способ диагностики неисправностей телемеханического тракта аппаратуты автоматики шахтной гидрокрепи для пластов крутого падения | 1985 |
|
SU1399475A1 |
| ВЗРЫВНОЙ КОНДЕНСАТОРНЫЙ ПРИБОР | 2014 |
|
RU2571461C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ И ПРЕДОТВРАЩЕНИЯ ВЗРЫВА ПЫЛЕМЕТАНОВОЗДУШНОЙ СМЕСИ В КОМПЛЕКСНО-МЕХАНИЗИРОВАННОМ ЗАБОЕ | 2010 |
|
RU2459958C1 |
| Устройство для передачи и приема сигналов | 1975 |
|
SU551686A1 |
| Устройство для передачи и при-EMA СигНАлОВ | 1979 |
|
SU798950A1 |
Пункт оператора
г1-1
