Известен способ автоматического контроля прямолинейности механизированной крепи, основанный на замере иройденного конвейером в сторону забоя пути посредством датчиков, прикреилевных к секциям конвейера на определенном расстоянии друг от друга, показания с которых передаются но кабелю к блоку контроля со световым табло.
Предложенный способ заключается в том, что прогиб креии определяют но величине остаточной магпитиой индукции меток, .нанесенных при движении выемочной машины на стальной трос, натянутый вдоль условной оси базовой балки, посредством магнитной головки. Способ позволяет повысить точность контроля прямолииейиости механизированной крепи очистного агрегата.
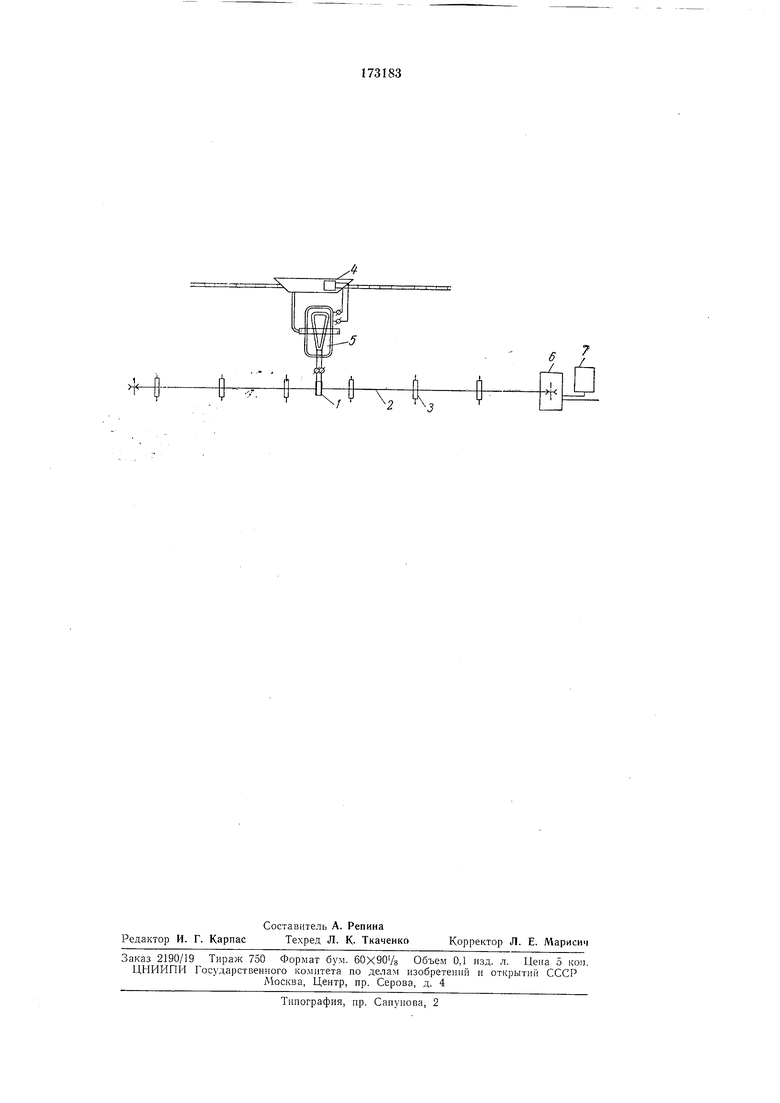
На чертеже изображена принципиальная схема Контроля прямолинейности механизированной крени очистного агрегата по предлагаемому способу.
Магнитная голо)вка / наносит магнитные метки на стальной трос 2, поддерживаемый роликами 3 и натянутый параллельно условной оси базовой балки нли конвейера между двумя блоками, установленными на краЙ1 их селениях крепи.
Магнитная головка питается от генератора переменного тока 4, размещеииого иа выемочной машине, через датчик перемеш,ения 5, например индукционный потенциометр, изменяющий выходное напряжение на записывающей головке в зависимости от расстояния между выемочной машиной и натянутой проволокой, что прнводнт к нзменению велпчн(мы остаточной индукции в sainHicaiiiibjx метках.
При иеремОтке проволоки посредством устройства 6 магнитная запись преобразуется в электрические импульсы и воспроизводится нидикатором 7, указывающим величину прогиба и какому расстоянию лавы она соответствует.
Предмет изобретения
Способ автоматического контроля прямолинейности механизированной крепн очнстного агрегата, отличающийся тем, что, с целью повышения точиости контроля, прогпб крепи определяют по величине остаточной магнитной нндукции меток, нанесенных при движенин выемочной машины на стальной трос, натянутый вдоль условной оси базовой балки посредством магнитной головки.
6 /
| название | год | авторы | номер документа |
|---|---|---|---|
| Агрегат для безлюдной выемки угля на крутых пластах | 1979 |
|
SU875083A1 |
| Узкозахватный выемочный агрегат | 1960 |
|
SU148771A1 |
| Устройство автоматического контроляпРяМОлиНЕйНОСТи МЕХАНизиРОВАННОйКРЕпи ОчиСТНОгО АгРЕгАТА | 1965 |
|
SU798314A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| ОЧИСТНОЙ КОМПЛЕКС ПРОФЕССОРА КАРИМАНА | 2006 |
|
RU2323339C2 |
| СПОСОБ ПЕРЕДВИЖЕНИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ ДЛЯ ФРОНТАЛЬНЫХ И СТРУГОВЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ И АГРЕГАТОВ И МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021524C1 |
| Система управления передвижением базы механизированной крепи | 1980 |
|
SU909204A1 |
| СТРУГОВЫЙ КОМПЛЕКС | 1992 |
|
RU2067178C1 |
| Агрегат для выемки угля | 1981 |
|
SU1101556A1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ НИШ В ДЛИННЫХ КОМПЛЕКСНО-МЕХАНИЗИРОВАННЫХ ОЧИСТНЫХ ЗАБОЯХ | 2011 |
|
RU2472937C1 |