Изобретение относится к машиностроению, в частности двигателестро- ению, а именно к регуляторам частоты вращения теплового двигателя, пре имущественно двигателя внутреннего
сгорания.
Цель изобретения - повьшгение зф- .фективности регулятора путем формирования скоростных характеристик двигателя по заданному закону и по- вышения качества переходного процесса двигателя.
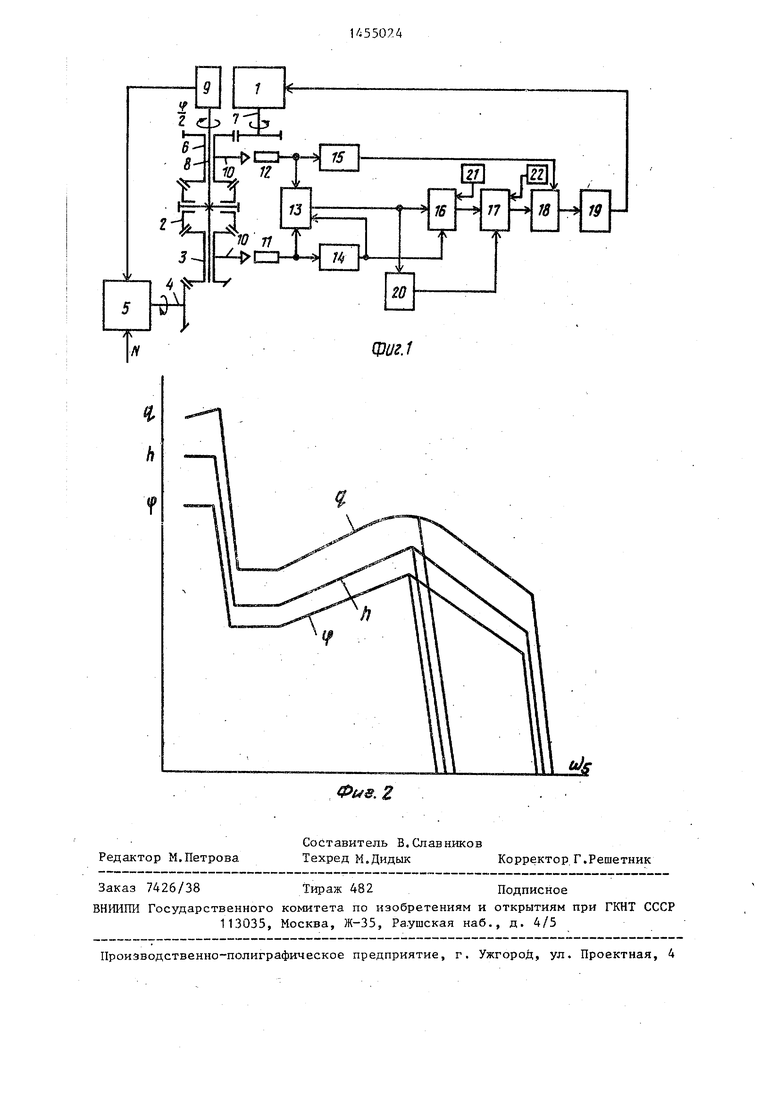
На фиг.1 представлена принципиаль- 5 ная схема регулятора; на фиг.2 - скоростные характеристики подачи топлива, положения топливодозируюtero органа и фазового сдвига (для тракторного варианта регулятора).
На фиг,1 и 2 применены ел едущие |эбо значения:
N - нагрузка двигателя;
ср - фазовьм сдвиг между приводными валами дифференциала;
Ч угол разворота суммирующего
зала дифференциала;
COj - частота вращения двигателя;
h - положение топпиводозирующего эргана;
I q - подача топлива. I Регулятор частоты вращения содер- т электродвигатель 1, дифференциал |2, приводной вал 3 которого сообщен
17 вычисления управляющего воздейс вия.
Регулятор частоты вращения рабо
5 ет следующим образом.
Вал 3 дифференциала 2 приводитс во вращение от двигателя 5 через в 4, а вал 6 дифференциала 2 приводи во вращение от вала 7 электродвига
10 ля 1 во встречном направлении. Зад ние по частоте вращения электродви гателя вводится в программньй блок 16 с помощью устройства 21 внешнег ввода информации и через блок 17
15 вычисления управляющего воздействи поступает в блок 18 управления эле тродвигателем. На установившемся р жиме двигателя 5 скорости вращения приводных валов 3 и 6 одинаковы.
1с валом 4 двигателя 5. Другой привод-20 Вследствие этого суммирующий вал 8
;ной вал 6 дифференциала 2 связан с |валом 7 электродвигателя 1. Сумми- |рующий вал 8 дифференциала 2 связан |с топливодозирующим органом 9 дви- |гателя 5. Приводные валы 3 и 6 име- |ют метки 10 их угловых положений. {Регулятор содержит также о 1метчики 11 и 12 угловых положений приводных iвaлoв 3 и 6 дкфференциапа 2, иэмери- 1тель 13.фазового сдвига, измерители :14 и 15 частоты вращения, двигателя ;5 . и электродвигателя 1, програм- |мный блок 16, блок 17 вычисле- ; :ния управляющего воздействия, блок 18 управления электродвигателем, устройство 19 защиты от перегрузок, ;дифференцирующее устройство 20, устройство 21 и 22 внешнего ввода Информации.
Программный блок 16, блок 17 вычисления управляющего воздействия, блок Н- управления электродвигателем 1, устройство 19 защиты от перегрузок , подключенное к электродвигателю 1, соединены последовательно. Входы измерителя 13 фазового сдвига подключены к отметчикам 11 и 12 уг- :ловых положений валов 3 и 6 и выходу измерителя 14 частоты вращения двигателя, а выход - к программному блоку 16. Выходы измерителей 14 и 15 частоты вращения двигателя 5 и элек- -тродвигателя 1 подключены соответственно к входам программного блока 16 и блока 18 управления электродвигателем .
Вход дифференцирующего устройства 20 подключен к выходу измерителя 13 фазового сдвига, а выход - к блоку
диференциала 2 и жестко связанный ним топливодозирующий орган 9 непо движны, причем положение последнего соответствует нагрузке и скоростном
25 режиму двигателя 5, при этом относи тельные угловые координаты приводны валов (фазовый сдвиг между ними), } определяемые на каждом обороте с по мощью меток 10 их угловых положе30 НИИ, остаются неизменными. Если нагрузка двигателя 5 изменится, топ- ливодозирующий орган 9 займет новое положение, вследствие чего относительные угловые координаты валов 3
35 6, кинематически жестко связанных через механизм дифференциала 2, изменятся. Сигналы отметчиков 11 и 12 угловых положений валов 3 и 6 ди ференциала 2 поступают на входы из40 мерителя 13 фазового сдвига, куда поступает также сигнал по частоте вращения вала двигателя 5 с выхода измерителя 14. По сигналам отметчиков 11 и 12 в измерителе 13 опреде45 ляется временной интервал между мет 10 приводных валов 3 и 6, на .основании которого с учетом скорости вращения вала 4 двигателя 5 рас считывается фазовьм сдвиг между при
gQ водными валами 3 и 6 дифференциала В регуляторе использована особен ность дифференциального механизма, заключающаяся в том, что фазовое рассогласование между его приводны55 ми валами 3 и 6 определяет положение суммирующего вала 8 дифференциала 2 и, следовательно, положение топливодозирующего органа 9, определяющего цикловую подачу q (фиг.2)
17 вычисления управляющего воздействия.
Регулятор частоты вращения работает следующим образом.
Вал 3 дифференциала 2 приводится во вращение от двигателя 5 через вал 4, а вал 6 дифференциала 2 приводится во вращение от вала 7 электродвигателя 1 во встречном направлении. Задание по частоте вращения электродвигателя вводится в программньй блок 16 с помощью устройства 21 внешнего ввода информации и через блок 17
вычисления управляющего воздействия поступает в блок 18 управления электродвигателем. На установившемся режиме двигателя 5 скорости вращения приводных валов 3 и 6 одинаковы.
Вследствие этого суммирующий вал 8
диференциала 2 и жестко связанный с ним топливодозирующий орган 9 непо- движны, причем положение последнего соответствует нагрузке и скоростному
режиму двигателя 5, при этом относительные угловые координаты приводных валов (фазовый сдвиг между ними), }.: определяемые на каждом обороте с помощью меток 10 их угловых положеНИИ, остаются неизменными. Если нагрузка двигателя 5 изменится, топ- ливодозирующий орган 9 займет новое положение, вследствие чего относительные угловые координаты валов 3 и
6, кинематически жестко связанных через механизм дифференциала 2, изменятся. Сигналы отметчиков 11 и 12 угловых положений валов 3 и 6 дифференциала 2 поступают на входы измерителя 13 фазового сдвига, куда поступает также сигнал по частоте вращения вала двигателя 5 с выхода измерителя 14. По сигналам отметчиков 11 и 12 в измерителе 13 определяется временной интервал между мет- 10 приводных валов 3 и 6, на основании которого с учетом скорости вращения вала 4 двигателя 5 рассчитывается фазовьм сдвиг между приводными валами 3 и 6 дифференциала 2. В регуляторе использована особенность дифференциального механизма, заключающаяся в том, что фазовое рассогласование между его приводныи валами 3 и 6 определяет положение суммирующего вала 8 дифференциала 2 и, следовательно, положение топливодозирующего органа 9, опрееляющего цикловую подачу q (фиг.2).
Изменение фазового рассогласования приводных валов 3 и 6 дифференциала 2 на угол cf приводит в силу кинематической особенности дифференциала 2 к разовроту суммирующего
tp вала 8 на угол -т-.
Сигнал измерителя 13 фазового сдвига поступает в программный блок 16, где сравнивается с заданным по программе, учитьюающей зависимость положения топлйводозирующего органа 9 от частоты вращения вала 4 двигателя 5. Информация о частоте вращения поступает с измерителя 14. При достижении фазовым сдвигом заданного уровня, определяемого программой для данной комбинации параметров, в программном блоке 16 вы- рабатьшается корректирующий сигнал, направленный на изменение постзшаю- щего с устройства 21 внешнего ввода информации задания по скорости. Этим обеспечивается формирование требуемых скоростных характеристик по заданному закону (фиг.2).
При изменении нагрузки двигателя 5 или задании нового скоростного режима частота вращения одного из валов 3 или 6 изменяется,вследствие чего начинает разворачиваться суммирующий вал 8 дифференциала 2, и топливодозирующий орган 9 перемещается в сторону уничтожения рассогласования между скоростями вращения Приводных валов 3 и 6.
Для обеспечения стабильности скоростного режима электродвигателя 1 и, следовательно, двигателя 5 сигнал обратной связи с измерителя t5 частоты вращения электродвигателя подается в блок 18 управления электродвигателем.
1455024
При дости:1сении топливодозирующим органом 9 крайних положений, при которых он становится на упор, или при его прихватывании, когда нагрузка на электродвигатель 1 резко возрастет, срабатывает устройство 19 его защиты от перегрузок , ограничивающее максимальные токи.
Для улучшения качества переходного процесса тепловою двигателя в динамических режк15ах регулятор дополнительно оснащен дифференцирующим устройством 20.
: При развороте суммирующего вала 8 дифференциала 2 в случае задания нового скоростного либо нагрузочного режима разность фаз приводных валов 3 и 6 дифференциала 2 начина- ет изменяться. Скорость ее изменения в виде производной по времени определяется дифференцирующим устройством 20. Сигнал по скорости изменения разности фаз приводных валов 3 и 6 дифференциала 2 суммируется с сигна- лрм задания по скорости, поступающим с программного блока 16, таким
образом, чтобы обеспечить плавный разворот суммирующего вала 8 и,следовательно, плавное перемещение топ- ливодозирующего органа 9. Этим обеспечивается высокое качество переходных процессов теплового двигателя 5i Коэффициент усиления обратной связи по скорости изменения разности фаз приводных валов 3 и 6 дифференциала задается с помощью устройства 22 внешнего ввода информации.
Обеспечение возможности формиро-г вания скоростных характеристик по заданному закону позволяет использовать регулятор частоты вращения для автотракторных двигателей внут
реннего сгорания,
цзиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор частоты вращения теплового двигателя | 1985 |
|
SU1455023A1 |
| Система регулирования частоты вращения вала двигателя внутреннего сгорания | 1989 |
|
SU1741107A1 |
| РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ТЕПЛОВОГО ДВИГАТЕЛЯ | 1993 |
|
RU2097593C1 |
| РЕГУЛЯТОР СКОРОСТИ КОЛЕСА ТРАНСПОРТНОЙ МАШИНЫ | 1992 |
|
RU2065367C1 |
| Способ приработки двигателя внутреннего сгорания | 1989 |
|
SU1652860A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ДИЗЕЛЯ НА РЕЖИМАХ МАЛЫХ ПОДАЧ И МИНИМАЛЬНО УСТОЙЧИВЫХ ОБОРОТОВ ПОД НАГРУЗКОЙ И ХОЛОСТОГО ХОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513529C1 |
| Стенд для обкатки и испытания двигателя внутреннего сгорания | 1986 |
|
SU1348695A1 |
| ПОВОРОТНАЯ УСТАНОВКА | 1968 |
|
SU231181A1 |
| Регулятор частоты вращения двигателя внутреннего сгорания | 1988 |
|
SU1574877A1 |
| Регулятор частоты вращения двигателя внутреннего сгорания | 1988 |
|
SU1576705A2 |
| Регулятор числа оборотов двигателя | 1978 |
|
SU708065A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
