сл
44
О vj
О СЛ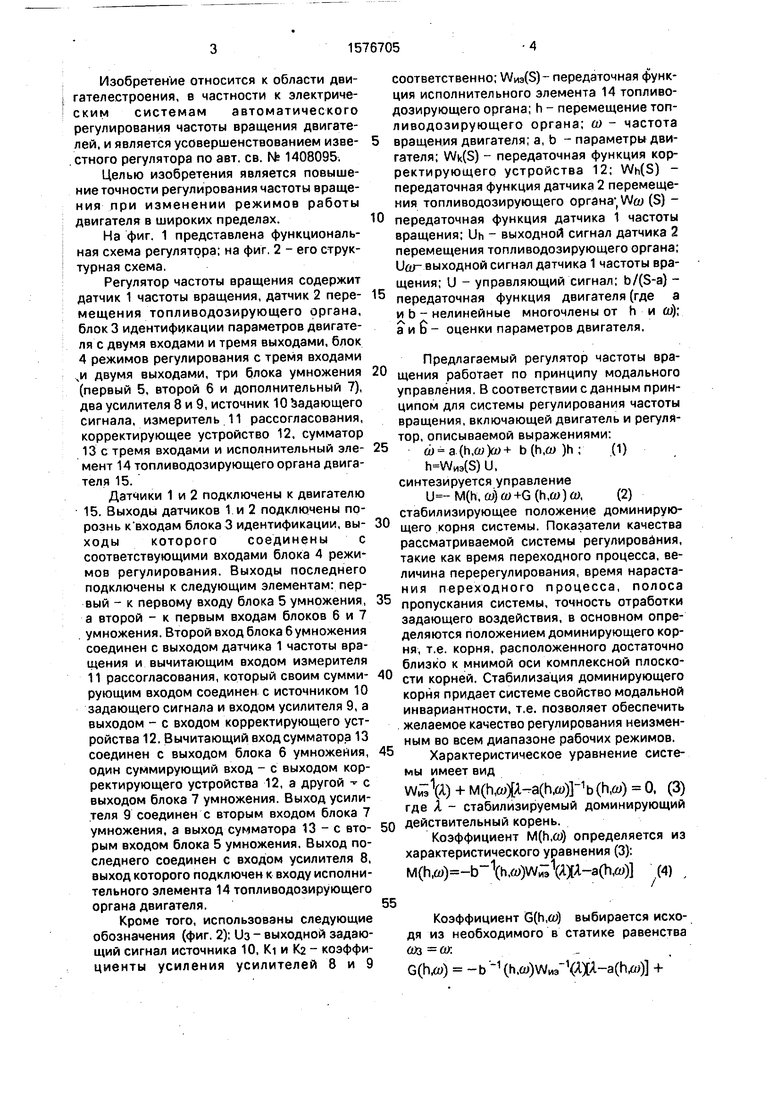
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор частоты вращения двигателя внутреннего сгорания | 1985 |
|
SU1271988A1 |
| Регулятор частоты вращения двигателя внутреннего сгорания | 1988 |
|
SU1574877A1 |
| Регулятор частоты вращения двигателя внутреннего сгорания | 1986 |
|
SU1408095A1 |
| Система управления для двигателя внутреннего сгорания с наддувом | 1988 |
|
SU1643762A1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
| Способ управления двухбарабанным ленточным конвейером | 1984 |
|
SU1286474A1 |
Изобретение позволяет повысить точность регулирования частоты вращения. Регулятор содержит датчик 1 частоты вращения, датчик 2 перемещения исполнительного элемента 14 топливодозирующего органа, блок 3 идентификации, блок 4 режимов регулирования, три блока 5-7 умножения, два усилителя 8 и 9, измеритель 11 рассогласования, корректирующее устройство 12 и сумматор 13. Регулятор работает с использованием принципа модального управления. При изменении рабочих режимов двигателя блок 3 идентификации и блок 4 режимов регулирования по сигналам с датчиков 1 и 2 вырабатывают сигналы оценок параметров двигателя, с помощью которых регулятор осуществляет поддержание желаемых показателей качества системы регулирования. Отсутствие перерегулирования и монотонный характер переходного процесса обеспечивают повышение надежности и топливной экономичности двигателя в широком диапазоне его рабочих режимов. 2 ил.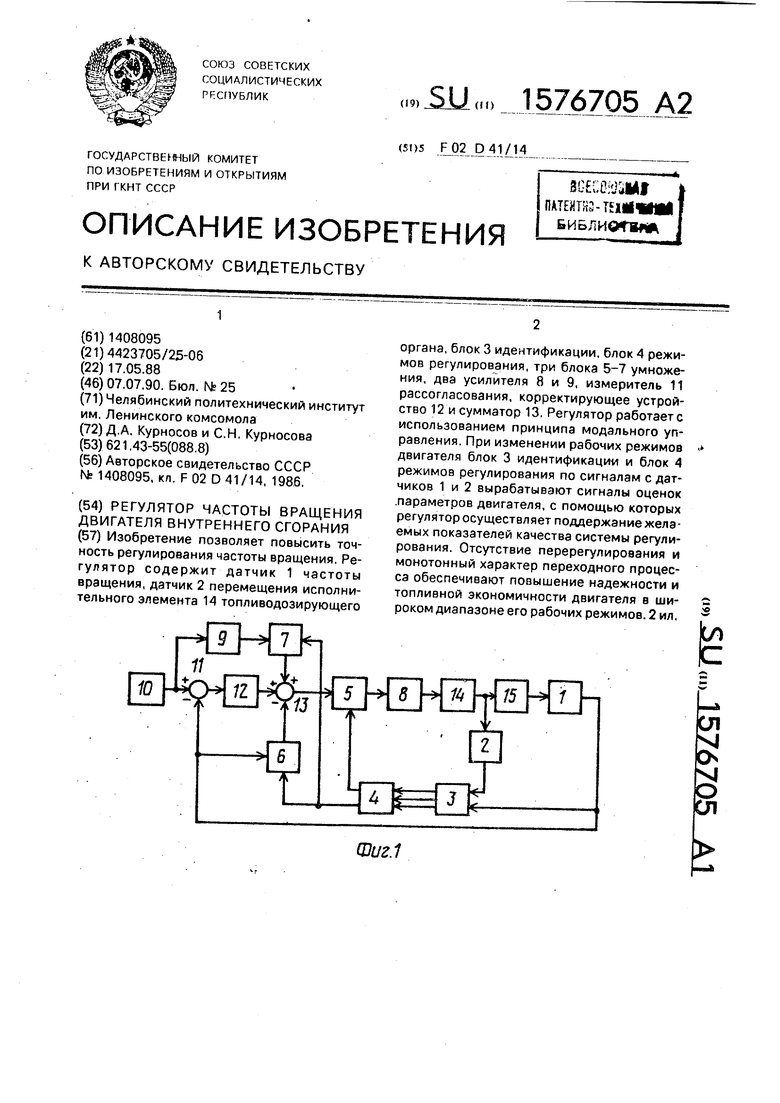
Шиг.1
Изобретение относится к области дви- гателестроеиия, в частности к электрическим системам автоматического регулирования частоты вращения двигателей, и является усовершенствованием известного регулятора по авт. св. № 1408095.
Целью изобретения является повышение точности регулирования частоты враще- ния при изменении режимов работы двигателя в широких пределах.
На фиг, 1 представлена функциональная схема регулятора; на фиг. 2 - его структурная схема.
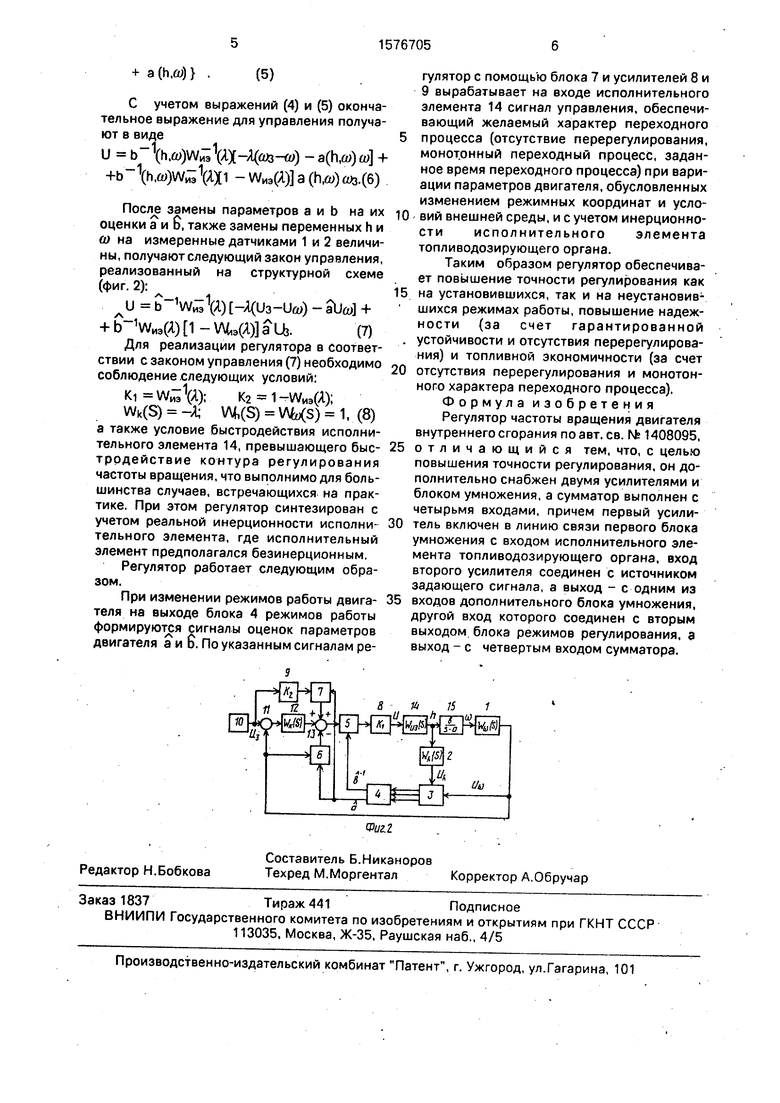
Регулятор частоты вращения содержит датчик 1 частоты вращения, датчик 2 перемещения топливодозирующего органа, блок 3 идентификации параметров двигателя с двумя входами и тремя выходами, блок А режимов регулирования с тремя входами ,и двумя выходами, три блока умножения (первый 5, второй 6 и дополнительный 7), два усилителя 8 и 9, источник 10 задающего сигнала, измеритель 11 рассогласования, корректирующее устройство 12, сумматор 13 с тремя входами и исполнительный элемент 14 топливодозирующего органа двигателя 15.
Датчики 1 и 2 подключены к двигателю 15. Выходы датчиков 1 и 2 подключены порознь к входам блока 3 идентификации, выходы которого соединены с соответствующими входами блока 4 режимов регулирования. Выходы последнего подключены к следующим элементам: первый - к первому входу блока 5 умножения, а второй - к первым входам блоков 6 и 7 умножения. Второй вход блока 6 умножения соединен с выходом датчика 1 частоты вращения и вычитающим входом измерителя 11 рассогласования, который своим суммирующим входом соединен с источником 10 задающего сигнала и входом усилителя 9, а выходом - с входом корректирующего устройства 12. Вычитающий вход сумматора 13 соединен с выходом блока 6 умножения, один суммирующий вход - с выходом корректирующего устройства 12, а другой с выходом блока 7 умножения. Выход усилителя 9 соединен с вторым входом блока 7 умножения, а выход сумматора 13 - с вторым входом блока 5 умножения. Выход последнего соединен с входом усилителя 8, выход которого подключен к входу исполнительного элемента 14 топливодозирующего органа двигателя.
Кроме того, использованы следующие обозначения (фиг. 2): 1)з - выходной задающий сигнал источника 10, Ki и К2 - коэффициенты усиления усилителей 8 и 9
соответственно; Л/иэ(5)- передаточная функция исполнительного элемента 14 топливодозирующего органа; h - перемещение топливодозирующего органа; ш - частота
вращения двигателя; a, b - параметры двигателя; Wk(S) - передаточная функция корректирующего устройства 12; Wh(S) - передаточная функция датчика 2 перемещения топливодозирующего органа (S) 0 передаточная функция датчика 1 частоты вращения; Uh - выходной сигнал датчика 2 перемещения топливодозирующего органа; (Jar выходной сигнал датчика 1 частоты вращения; U - управляющий сигнал; b/(S-a) 5 передаточная функция двигателя (где а и b - нелинейные многочлены от h и ш); гГи Ј - оценки параметров двигателя.
Предлагаемый регулятор частоты вра- 0 щения работает по принципу модального управления. В соответствии сданным принципом для системы регулирования частоты вращения, включающей двигатель и регулятор, описываемой выражениями:
(п,ш)ш+ b(h,co )h ; (1)
(5) U, синтезируется управление
M(h, ш) ш +G (h,ct) со, (2) стабилизирующее положение доминирующего корня системы. Показатели качества рассматриваемой системы регулирования, такие как время переходного процесса, величина перерегулирования, время нарастания переходного процесса, полоса 5 пропускания системы, точность отработки задающего воздействия, в основном определяются положением доминирующего корня, т.е. корня, расположенного достаточно близко к мнимой оси комплексной плоско- 0 сти корней. Стабилизация доминирующего корня придает системе свойство модальной инвариантности, т.е. позволяет обеспечить желаемое качество регулирования неизменным во всем диапазоне рабочих режимов.
Характеристическое уравнение системы имеет вид
) + M(h,(h,y)-1b(M О, (3) где А - стабилизируемый доминирующий Q действительный корень.
Коэффициент M(h.u) определяется из характеристического уравнения (3):
М(И,у)((АХА-а(Ь/о) (4) ,
5
0
5
/
Коэффициент G(h,w) выбирается исходя из необходимого в статике равенства ftfc -or.
G(M -Ьн((АХА-а(М) +
a (h,o)}
(5)
С учетом выражений (4) и (5) окончательное выражение для управления получают в виде
U ,y)(W3--ftO -a(h,w)ft + (h,w)(AXl - WM3(A)a (h,y)W3.(6)
После замены параметров а и b на их оценки а и В, также замены переменных h и ft) на измеренные датчиками 1 и 2 величины, получают следующий закон управления, реализованный на структурной схеме (фиг.2)
ли (A) -А(и3-М - +
+ b-1WM3(A)1-W,3(A)aU.(7)
Для реализации регулятора в соответствии с законом управления (7) необходимо соблюдение следующих условий:
(A); К2 (А);
Wk(S) -A; W,(S) ) 1, (8) а также условие быстродействия исполнительного элемента 14, превышающего быс- тродействие контура регулирования частоты вращения, что выполнимо для большинства случаев, встречающихся на практике. При этом регулятор синтезирован с учетом реальной инерционности исполни- тельного элемента, где исполнительный элемент предполагался безинерционным.
Регулятор работает следующим образом.
При изменении режимов работы двига- теля на выходе блока 4 режимов работы формируются сигналы оценок параметров двигателя а и о4. По указанным сигналам регулятор с помощью блока 7 и усилителей 8 и 9 вырабатывает на входе исполнительного элемента 14 сигнал управления, обеспечивающий желаемый характер переходного процесса (отсутствие перерегулирования, монотонный переходный процесс, заданное время переходного процесса) при вариации параметров двигателя, обусловленных изменением режимных координат и условий внешней среды, и с учетом инерционности исполнительного элемента топливодозирующего органа.
Таким образом регулятор обеспечивает повышение точности регулирования как на установившихся, так и на неустановившихся режимах работы, повышение надежности (за счет гарантированной устойчивости и отсутствия перерегулирования) и топливной экономичности (за счет отсутствия перерегулирования и монотонного характера переходного процесса). Формула изобретения Регулятор частоты вращения двигателя внутреннего сгорания по авт. св. № 1408095, отличающийся тем, что, с целью повышения точности регулирования, он дополнительно снабжен двумя усилителями и блоком умножения, а сумматор выполнен с четырьмя входами, причем первый усилитель включен в линию связи первого блока умножения с входом исполнительного элемента топливодозирующего органа, вход второго усилителя соединен с источником задающего сигнала, а выход - с одним из входов дополнительного блока умножения, другой вход которого соединен с вторым выходом блока режимов регулирования, а выход - с четвертым входом сумматора.
| Регулятор частоты вращения двигателя внутреннего сгорания | 1986 |
|
SU1408095A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
