Изобретение относится к двигателест- роению, а именно к системам электрического регулирования частоты вращения двигателей внутреннего сгорания.
Цель изобретения - повышение точности регулирования путем повышения помехоустойчивости процесса идентификации и компенсации влияния момента нагрузки двигателя.
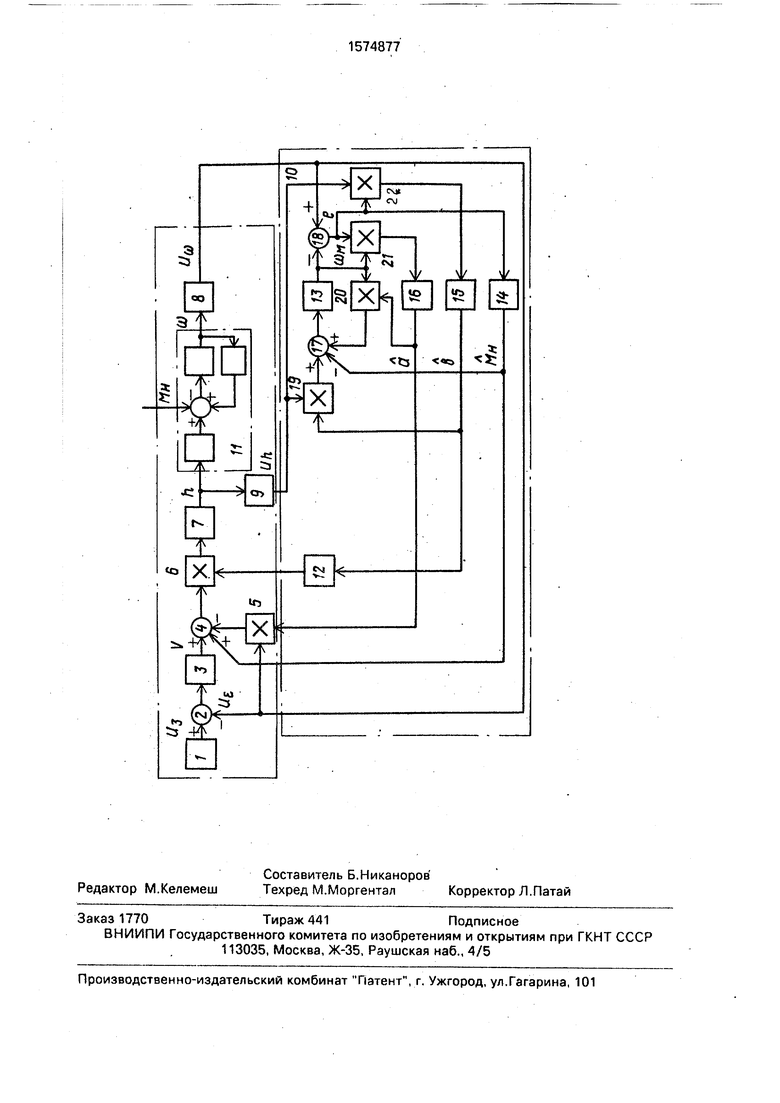
На чертеже показана структурная схема регулятора.
Регулятор содержит источник 1 задающего сигнала, первый сумматор 2 с двумя входами, корректирующее устройство 3, второй сумматор 4 с тремя входами, первый блок 5 умножения, второй блок 6 умножения, исполнительный элемент 7 топливодозирующего органа, датчик 8 частоты вращения, датчик 9 перемещения топливодозирующего органа и блок 10 идентификации. На схеме показана структурная схема 11 двигателя. Блок 10 идентификации параметров двигателя и момента нагрузки содержит блок 12 вычисления обратной функции, четыре интегратора (первый 13, второй 14, третий 15 и четвертый 16), третий сумматор 17 с тремя входами, четвертый сумматор 18 с двумя входами и четыре блока умножения (третий 19, четвертый 20, пятый 21 и шестой 22).
Суммирующий вход сумматора 2 соединен с источником 1 задающего сигнала, вычитающий вход - с выходом датчика 8 частоты вращения и первым входом блока 5
ОТ
XI
fcb
00
VI
VI
умножения, а выход - с входом корректиру- |ющего устройства 3, Первый суммирующий вход сумматора 4 соединен с выходом корректирующего устройства, вычитающий вход - с выходом блока 5 умножения, а выход - с первым входом блока 6 умножения, выход которого связан с входом исполнительного элемента 7 топливодозирующего органа. Два суммирующих входа сумматора 17 соединены соответственно с выходами блоков 19 и 20 умножения, а выход - с входом интегратора 13. Вычитающий вход сумматора 18 соединен с выходом интегратора 13 и первыми входами блоков 20 и 21 умножения, суммирующий вход - с выходом датчика 8 частоты вращения, а выход-с вторым входом блока 21 умножения, входом интегратора 14 и одним входом блока 22 умножения, другой вход которого соединен с выходом датчика 9 перемещения, а выход - с входом интегратора 15. Вход интегратора 16 соединен с выходом 6лока21 умножения, а выход - с вторыми входами блоков 20 и 5 умножения. Выход интегратора 15 соединен с вторым входом блока 19 умножения и входом блока 12 вычисления обратной функции, выход которого соединен с вторым входом блока б умножения. Выход интегратора 14 соединен с вычитающим входом сумматора 17 и вторым суммирующим входом сумматора 4.
В блоке 10 идентификации интегратор 13, сумматор 17 и блоки 19 и 20 умножения составляют модель двигателя. На структурной схеме использованы следующие обозначения: Уз - входной задающий сигнал источника 1; Ue - сигнал, пропорциональный ошибке отработки задающего сигнала; WK(S) - передаточная функция корректирующего устройства 3; V - выходной сигнал корректирующего устройства; Л/Иэ(з) -- передаточная функция исполнительного элемента топливодозирующего органа; h - перемещение топливодозирующего органа; Uh - выходной сигнал датчика топливодозирующего органа; со- частота вращения вала двигателя; Uo выходной сигнал датчика 9 частоты вращения, Wh(s) - передаточная функция датчика топливодозирующего органа; Wo)(s)- передаточная функция датчика частоты вращения двигателя; a, b - параметры двигателя, эквивалентные по физическому смыслу соответственно фактору устойчивости и эффективности топливо- подачи двигателя; Мн - момент нагрузки, приведенный к валу двигателя; частота вращения модели двигателя; - координатная ошибка идентификации, а ,о ,МН - оценки параметров двигателя и момента
нагрузки; /ty,d - положительные постоянные коэффициенты,
На структурной схеме реализованы следующие зависимости; дифференциальное уравнение двигателя
ш аш +Ъ h М„;
дифференциальное уравнение модели двигателя
с«м а + Јh - н ; уравнение ошибки идентификации
е алгоритм идентификации
dT- eftjM
-Ј
d 1ЙН -1
d t
- е
Синтез блока идентификации осуществлен методом настраиваемой модели в сочетании с прямым методом Ляпунова. При
синтезе были приняты следующие допущения;
быстродействие датчиков перемещения и частоты вращения, а также исполнительного элемента топл йв одозирующего органа
является достаточно высоким, благодаря чему можно пренебречь их передаточными функциями, т.е. считать, что
Wh(s) (s) W,3(s)1; двигатель с нагрузкой устойчив на всех рабочих режимах, т.е. его параметр а, зависящий от фактора устойчивости, всегда отрицателен
а °
скорости изменения идентифицируемых параметров малы, т.е.
da n db
n °--dT a
В случаях, когда последнее условие не выполняется, регулятор будет давать динамическую ошибку, исчезающую на установившемся режиме.
Регулятор работает следующим образом.
0
В процессе функционирования двигателя изменяются его параметры а и Ь, а также момент нагрузки Мн, что вызывает нарушения нормального режима работы системы регулирования. При этом блок 10 идентификации вырабатывает оценки параметров двигателя b и момента нагрузки &н, с помощью которых регулятор осуществляет компенсацию изменения указанных параметров.
Алгоритм работы блока идентификации, синтезированный с использованием метода настраиваемой модели, описывается следующими дифференциальными уравнениями:
При точной настройке блока идентификации на установившемся режиме работы двигателя
. , , что позволяет полностью скомпенсировать изменения параметров а, Ь и Мн.
В результате.передаточная функция Выход корректирующего звена - частота вращения вала двигателя становится постоянной, не зависящей от режимов работы двигателя, и принимает вид
wfs)is)l
w v(s) s
Повышение точности регулирования достигается за счет компенсации отрицательного влияния момента нагрузки, а также за счет использования интеграторов в блоке идентификации, что позволяет избежать усиления высокочастотных помех сигналов датчиков, обусловленных электромагнитными наводками, пульсациями питания, вибрацией, импульсным характером работы двигателя и другимилфакторами.
Формула изобретения Регулятор частоты вращения двигателя внутреннего сгорания, содержащий датчик частоты вращения.,вала двигателя, датчик перемещения топдиводозирующего органа, исполнительный элемент топливодозирую- щего органа, два сумматора с двумя входами, два блока умножения, корректирующее устройство, источник задающего сигнала и блок идентификации, причем суммирующий вход первого сумматора соединен с источником задающего сигнала, вычитающий вход - с выходом датчика частоты вращения и первым входом первого блока умножения, а выход - с входом корректирующего устройства, выход которого соединен с суммирующим входом второго сумматора, вычитающий вход которого соединен с выходом первого блока умножения, а выход - с первым входом второго блока умножения, 5 выход которого соединен с входом исполнительного элемента, а блок идентификации соединен своими входами с выходами датчика частоты вращения и датчика перемещения, а выходами - с вторыми входами
0 первого и второго блоков умножения, отличающийся тем, что, с целью повышения точности регулирования, второй сумматор дополнительно снабжен третьим входом, а блок идентификации выполнен в
5 виде четырех интеграторов, четырех блоков умножения, третьего сумматора с тремя входами, четвертого сумматора с двумя входами и блока вычисления обратной функции, причем два суммирующих входа
0 третьего сумматора соединены соответственно с выходами третьего и четвертого блоков умножения, а выход третьего сумматора соединен с входом первого интегратора, выход которого соединен с первыми
5 входами четвертого и пятого блоков умножения и вычитающим входом четвертого сумматора, суммирующий вход которого соединен с выходом датчика частоты вращения,а выход - с вторым входом пятого блока
0 умножения, входом второго интегратора и одним входом шестого блока умножения, другой вход которого соединен с первым входом третьего блока умножения и выходом датчика перемещения, а выход - с вхо-
5 дом третьего интегратора, выход пятого блока умножения соединен с входом четвертого интегратора, выход которого соединен с вторыми входами четвертого и первого блоков умножения, выход третьего интегра0 тора соединен с вторым входом третьего блока умножения и входом блока вычисления обратной функции, выход которого соединен с вторым входом второго блока умножения, а выход второго интегратора со5 единен с вычитающим входом третьего сумматора и дополнительным суммирующим входом второго сумматора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор частоты вращения двигателя внутреннего сгорания | 1988 |
|
SU1576705A2 |
| Регулятор частоты вращения двигателя внутреннего сгорания | 1986 |
|
SU1408095A1 |
| Датчик момента нагрузки двигателя внутреннего сгорания | 1989 |
|
SU1658001A1 |
| Регулятор частоты вращения двигателя внутреннего сгорания | 1985 |
|
SU1271988A1 |
| Система управления для двигателя внутреннего сгорания с наддувом | 1988 |
|
SU1643762A1 |
| Система автоматического регулирования | 1979 |
|
SU930232A2 |
| Устройство для автоматического управления обкаткой двигателя внутреннего сгорания на испытательном стенде | 1983 |
|
SU1125398A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Двухканальная система управления | 1989 |
|
SU1656496A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
Изобретение позволяет повысить точность регулирования путем повышения помехоустойчивости процесса идентификации параметров двигателя и компенсации влияния момента нагрузки двигателя. Регулятор содержит источник задающего сигнала, два сумматора, корректирующее устройство, два блока умножения, датчик частоты вращения, датчик перемещения топливодозирующего органа, исполнительный элемент топливодозирующего органа и блок идентификации. Блок идентификации содержит четыре интегратора, три сумматора, четыре блока умножения и блок вычисления обратной функции. При изменении скоростного и нагрузочного режимов работы двигателя блок идентификации вырабатывает сигналы, компенсирующие изменение параметров двигателя и момента нагрузки, что приводит к стабилизации динамических характеристик двигателя. Использование интеграторов в блоке идентификации обеспечивает повышение помехозащищенности и точности работы регулятора. 1 ил.
| Регулятор частоты вращения двигателя внутреннего сгорания | 1986 |
|
SU1408095A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
