памяти, регистра 6 памяти, цифрового генератора 7 пилообразного сигнала, арифметико-логического блока 8 и цифрового пропорционально-интегрального регулятора 9. Канал точной стабилизации воздействует на электродвигатель 1 через второй вход усилителя 12 мощности. Выходной сигнал усилителя 12 мощности определяется суммой сигналов на его входах. 1 з.п. ф-лы, 1 ип.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ ПО БАЗОВОМУ ИНТЕГРАЛЬНОМУ МЕТОДУ (БИМ) | 1996 |
|
RU2162247C2 |
| Система стабилизации задержки | 1981 |
|
SU957422A1 |
| Функциональный генератор | 1978 |
|
SU736129A1 |
| СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВУХФАЗНЫХ ПОТОКОВ | 1995 |
|
RU2097750C1 |
| Стробоскопический преобразователь | 1985 |
|
SU1292183A1 |
| Устройство для измерения частоты сердечных сокращений | 1990 |
|
SU1759401A1 |
| Устройство для приема избыточной информации | 1984 |
|
SU1167638A1 |
| Аналого-цифровой частотомер | 1988 |
|
SU1712894A1 |
| Устройство автоматической подстройки линейного закона частотной модуляции | 1984 |
|
SU1218463A1 |
Изобретение относится к технике хранения информации на подвижном носителе и -может быть использовано в оптических и магнитных дисковых запоминающих устройствах. Изобретение позволяет при сохранении высоких характеристик стабильности скорости обеспечить режим псевдопостоянной линейной скорости носителя. Грубая стабилизация скорости осуществляется путем сравнения частот сигналовв частотном дискриминаторе 10 и воздействия разностным сигналом на электродвигатель I через первый вход усилителя 12 мощности. Канал грубой стабилизации скорости предназначен для поддержания скорости в диапазоне ра ботоспособности канала точной стабилизации, который состоит из первого и второго импульсных датчиков 2, 3 скорости вращения, блока 4 функциональных преобразователей, регистра 5 --ш Ф О) с-ж. 4ib 01 СП СО О)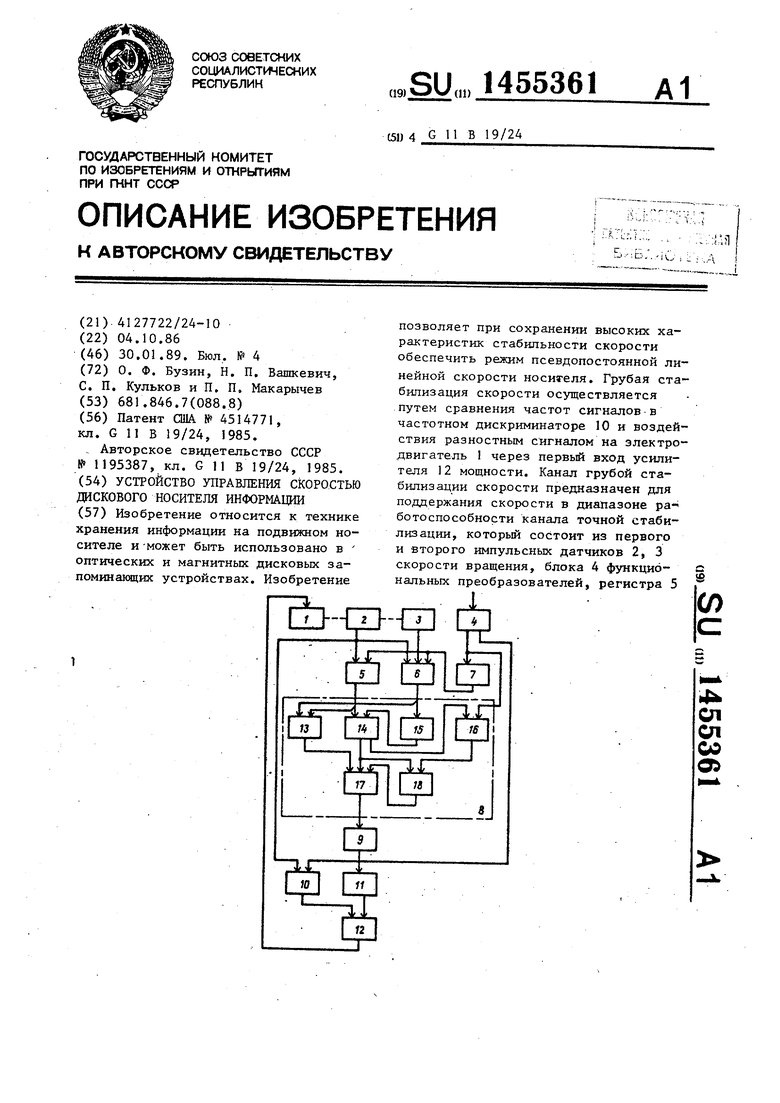
1
Изобретецие относится к технике хранения информации на подвижном носителе и может быть использовано в оптических и магнитных дисковых ЗУ.
Цель изобретения - расширение функциональных возможностей устройства за счет обеспечения возможности функционирования в режиме псевдопостоянной линейной скорости вращения носителя, .
На чертеже изображена структурная схема устройства управления скорость дискового носителя информации.
Устройство содержит электродвигатель 1 постоянного тока, второй импульсный датчик 2 скорости вращения, первьй импульсный датчик 3 скорости вращения, блок 4 функциональных преобразователей, регистр 5 памяти, |блок 6 памяти, цифровой генератор 7 Пилообразного сигнала, арифметико-логический блок 8, .цифровой пропорци Iонально-интегральный регулятор 9, I час-йзтньй дискриминатор 10, цифроана Iлоговьй преобразователь 11, усипи- Iтель 12 мощности.
: Арифметико-логический блок 8-со- держит одноразряднзпо схему 13 сравнения, первьй сумматор 14, блок 15 инверторов, блок 16 управляемь1Х инверторов, цифровой коммутатор 17, второй сумматор 18.
Дисковьй носитель информации и ко довьй диск датчиков скорости (не показаны) закреплены на валу электро- двигателя 1. Выход второго датчика 2 скорости соединен с первым входом частотного дискриминатора 10, вторым управляющим входом блока 6 памяти и управляющим входом регистра 5 памяти Выход первого датчика 3 скорости соединен с первым управляющим входом блока 6 памяти. Вход блока 4 функциональных преобразователей соединен с внешней шиной адреса информационной
5
5 0
0
5
0
2
дорожки, первьй выход подключен к второму входу частотного дискриминатора 10, второй .выход - к входу управляемого цифрового генератора 7 пилообразного сигнала и к третьему входу арифметико-логического блока 8. Выход регистра 5 памяти соединен с вторым входом арифметико-логического блока. Выход блвка 6 памяти соединен с пер;вым входом арифметико-логического блока 8. Выход управляемого цифрового генератора 7 пилообразного сигнала с.о единен с информационными . входами регистра 5 памяти и блока 6 памяти. Вь1ход арифметико-логического блока 8 через цифровой пропорционально -интеграл ьньй регулятор 9 и цифро- аналоговьй преобразователь 11 подключен к первому входу усилителя 12 мощности, второй вход которого соединен с выходом частотного детектора 10 и выход которого подключен к входу электродвигателя 1..
В арифметико-логическом блоке 8 старщнй разряд первого входа подан на первьй вход схемы 13 сравнения, а младшие разряды -. на вход б.лока 15 инверторов, старший разряд второго входа подключен к второму входу схемы 13 сравнения, а младшие - на первьй вход первого сумматорй 14. Третий вход соединен с информационным входом блока 16 управляемых инверторов. Выход схемы 13 сравнения подключен к управляющему входу цифрового коммутатора 17, выход которого является выходом блока 8. Информацион- ньй выход первого сумматора 14 подключен к первому информационному входу цифрового коммутатора 17 и к первому входу второго сумматора 18. Вы- ход переполнения первого сумматора 14 подключен к управляющему входу блока 16 управляемых инверторов. Выход блока 15 инверторов соединен с
вторым входом первого сумматора 14. Выход блока 16 управляемых инверторов подключен к второму входу второго сумматора 18, выход которого подан на второй информационный вход цифрового коммутатора 17,
Блок 4 функциональных преобразователей предназначен для преобразования кодов адресов дорожек в коды, определяющиё скорость носителя в каждой зоне. На втором выходе блока 4 функциональных преобразователей образуется код канала точной стабилизации скорости, который задает период пересчета цифрового генератора 7 и участвует в образовании выходного сигнала арифметико-логического блока 8. На первом выходе блока 4 функциональных преобразователей образуется код канала грубой стабилизации, которьй поступает на вход частотного детектора 10.
Выходной код канала точной стабилизации скорости
ll-Lls.
У„.п
М- Int
(R
).
де j О, 1,2, ..., Z-1 - номер зоны;
- целая часть числа, за- 30
ключенного в скобки; Л( - угловое расстояние между первым 3 и вторым 2 датчиками скорости;
fp - частота задающего гене- 05 ратора в управляемом цифровом генераторе 7 пилообразного сигнала; Vj, - заданная линейная скорость вращения диска; .40 п - количество периодов цифровой пилы управляемого гене ратора 7 пилообразного сигнала за заданное время движения 45 каждой метки кодового диска датчи1{ов скорости от первого датчика 3 до второго датчика 2; RJ, - диаметр самой внутренней 50
дорожки на диске; R , - диаметр, самой внешней дорожки на диске (z - количество зон на диске). Блок 4 функциональных преобразова- 55 елей может быть построен на основе остоянных или перепрограммируемых если необходима смена линейной скоости диска) ЗУ, на входы которых подаются коды адресов дорожек, а с выходов снимаются выходные коды, предварительно рассчитанные и записанные в соответствующие ячейки ЗУ.
Регистр 5 памяти предназначен для записи и хранения кодов, поступающих на его информационньй вход с выхода цифрового генератора 7, пилообразных сигналов. Момент записи определяется сигналом на управляющем входе, т,.е. сигналом с выхода второго датчика 2 скорости. Следовательно, длительност хранения каждого очередного кода - время-, между импульсами второго датчика 2 скорости.
Блок 6 памяти предназначен для записи и хранения кодов, поступающих на информационньй вход с выхода цифрового генератора 7 пилообразных сигналов. Момент записи кода определяется сигналом на первом управляющем входе, т.е. сигналом с выхода перво- го датчика 2 скорости. Сигнал на втором управляющем входе блока 6 памяти организует адресацию памяти (распределение входньк кодов по соответствующим ячейкам блока 6 памяти) и одновременно чтение информации на выход блока 6 памяти. Минимально необходи- мое для работы блока 6 памяти количество его ячеек равно количеству меток кодового диска, находящихсямежду первым 3 и вторым 2 датчиками скорости. Длительность хранения каждого очередного кода в ячейках блока 6 памяти - время движения каждой метки кодового диска от первого датчика 3 скорости до второго датчика 2. Таким образом, при появлении импульса от каждой метки кодового диска на выходе первого датчика 3 скорости в соотвеТ ствующую ячейку блока 6 памяти запи- сьшается текущее состояние цифрового генератора 7 пилообразного сигнала и хранится до момента появления импульса второго датчика 2 скорости от той же самой метки, после чего считывается на выход блока 6 памяти и совместно с выходнь1ми сигналами регистра 5 памяти и блока 4 функциональных преобразователей участвует в образовании выходного сигнала арифметико- логического блока 8.
Управляемьй цифровой генератор 7 пилообразного сигнала предназначен для выработки цифрового нарастающего сигнала и импульсного напряжения,
1|содирутощего соседние периоды пилы |1оследовательно нулем и единицей. Пе- |зиод пилы определяется кодом M,j , Поступающим на его вход с первого выхода блока 4 функциональных преоб- |)азователей:
M,-/fo;
о, 1
, , . « . , Z , при работе
период в j-й зоне;
код на входе генератора 7; частота задающего генератора;
- количество зон на диске. анным временем движения кажи кодового диска от перво го скорости до второго
Tj 4Ч/Л
де
& - угловое расстояние между датчиками скорости;
SI- - заданная угловая скорость 25 при работе устройства в зоне, период пилы Т„.; связан
следующим
О соотношением:
i .
.1
X П,
где n - количество периодов пилы за заданное время движения каждой метки кодового диск а от
I первого датчика скорости до
| второго.
I
; Таким образом, цифровой генератор 7 цифрового сигнала вырабатывает периодическую последовательность кодов ;N, старший разряд S которых несет ин- формацию о знаке, а младшие разряды ;изменяются от О до М;-1.
Цифровой генератор 7 пилообразного сигнала может быть построен на основе счетчика с переменным козффици- ентом деления и счетного триггера.
Арифметико-логический блок 8 предназначен для выработки цифрового сигнала N. в соответствии с выражением:
N,-,,-N.-,1.
если S) S;:, ,4,6,..,
(О
N;,, если ,,, ,-,, 0, n 2,4,6,...
N,,-N,-,,-Mj, если S;,,S,.,, Ni,i-N ,,,гО, n 2,4,6, ...
Nbi-N, H
если
S,,- , ,3,5, ...
+Mj, если 5,-, ,-,,, Ni i-N,, i О, п 1,3,5,...
N«,-N
(2)
1,1
N;,i-Ni,,-Mj, если Si , ,,7, О, n 1,3,5,...,
0
5
Ь
5
0
5
N,-M
и8
где j-0,1,2,..., z-1-номер зоны;. i 0,1,2,... - номер такта рабо-ты преобразователя 8; - соответственно значения кода и знака напряжения цифрового генератора 7 пилообразного сигнала, поступающих на первый вход арифметико-логи г ческого блока 8 через блок 6 памяти и соответствующие моментам времени появления импульсов первого датчика 3 скорости (прохождения меток кодового диска возле первого датчика 3 скорости);
значения
кода и знака напряжения цифрового генератора 7 пилообразного сигнала, поступающие на вторые входы арифметико-логического блока 8 через регистр 5 памяти, и соответствующие моменты Времени появления импульсов второго датчика 2 скорости; код на третьем входе арифметико-логического блока 8, поступающий с второго выхода блока 4 функциональных преобразователей.
S. осуществляется схемой 13 сравнения..В первом сумматоре 14 определяется разN j иЗ; -соответственно
М,., Сравнение знаков S; и
ность N; и N; ,. В блоке 15 инверторов происходит инверсия кода N . . В блоке 16 управляемых инверторов в - зависимости от знака разности N ; - N j- , (определяется состоянием выхода переполнения первого сумматора) осуществляется или не осуществляется да- версия кода .М (см. -(О и (2)).
На выходе второго сумматора 18 образуется код К(д-К,-,+М; или , |,r
Mj. Код на выходе цифрового коммутатора 17 является выходным кодом арифметико-логического блока 8. В зависимости от выходного сигнала схемы 13 сравнения на выход цифрового коммутатора 17 передается выходной сигнал первого сумматора 14 или второго сумматора 18.
Частотный дискриминатор 10 пред- назначен для сравнения текучей частоты сигнала на первом входе (на выходе второго датчика 2 скорости) и заданной частоты сигнала датчика в зо- не, определяемой кодом на втором вхо де (на втором выходе блока 4).
Устройство работает следующим образом.
Грубая стабилизация скорости осуществляется путем сравнения частот сигналов в частотном дискриминаторе 10 и воздействии разностным сигналом на электродвигатель 1 через первый вход усилителя 12 мощности (выходной сигнал усилителя 12 мощности опреде- ляется суммой сигналов на.его входах: Канал грубой стабилизации скорости предназначен для поддержания скорости в диапазоне работоспособности канала точной стабилизации, который работа- ет следующим образом. При вращении двигателя и движении меток кодового диска с датчиков скорости 2 и 3 снимаются сигналы. При появлении импульс ного сигнала на выходе первого датчи- З скорости производится запись состояния цифрового генератора 7 пилообразного сигнала в ячейку блока 6 памяти, а при появлении импульсного сигнала на выходе второго датчика 2 скорости - запись состояния цифрового генератора (пилообразного сигнала) в регистр 5 памяти и одновременное чте- ние из ячейки памяти блока 6 состояния цифрового генератора 7 пилообраз- ного сигнала, соответствующего прохождению данной метки кодового диска через датчик 3. Выходные сигналы регистра 5 памяти, блока 6 памяти и блока 4 функциональных преобразова- телей 4 обрабатываются в ари4 1етико- логическом блоке 8. Уменьшению скорости электродвигателя 1 относительно заданной соответствует положительньй код на выходе арифметико-логического блока 8, которьй далее через цифровой регулятор 9, цифроаналоговый преобразователь i1 и усилитель 12 мощности вызывает увеличение скорости электро-
двигателя 1 и компенсацию возникшего отклонения скорости. Аналогично увеличению скорости электродвигателя 1 относительно заданной соответствует отрицательньш код на выходе арифметико-логического блока 8, который вызывает уменьшение скорости электродвигателя 1. Изменение адреса дорожки на входе блока функциональных преобразователей, происходящее при движении позиционера по радиусу диска, вызывает соответствующее -изменение выходных кодов блока 4, функциональных преобразователей периода пилы цифрового генератора 7 пилообразного сигнала и далее скорости электродвигателя 1.
Формула изобретения
б|лок функциональных преобразователей Ч арифметико-логический блок, а циф- фвой генератор пилообразного сигна- 4а вьтолнен управляемым, причем вход б|лока функциональных преобразователей Соединен с шиной адреса информационной дорожки, первый выход соединен с 1торым входом частотного дискриминатора, а второй выход соединен с вяо- лом цифрового генератора пилообразно- I o сигнала и третьим входом арифмети- ио-логического блока, первый вход iioTOporo соединен с выходом регистра памяти, а вт.орой вход соединен с выг. з1:одом блока памяти, выход арифметико- логического блока соединен с входом цифрового пропорционально-интеграль- юго регулятора.
0
5
чен к первому входу схемы сравнения, младшие разряды - к входу блока инверторов, старший разряд второго входа арифметико-логического блока под- клочен к второму входу схемы сравнения, младшие разряды - к перво; 1у входу первого сумматора, третий вход арифметико-логического блока подключен к информационному входу блока управляемых инверторов, выход схемы сравнения соединен с управляющим входом цифрового коммутатора, информационный выход первого сумматора соеди- . нен с первым информационным входом цифрового коммутатора и первым входом второго сумматора, вырсод переполнения первого сумматора подключен к управляющему входу блока управляемых инверторов, выход блока инверторов соединен с вторым входом первого сумматора, выход блока управляемых инверторов подключен к второму входу вто рого.сумматора, выход второго сумматора соединен с вторым информационньм входом цифрового коммутатора, выход которого является выходом всего арифметико-логического блока.
| Патент ОМ № 4514771, кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Авторское свидетельство СССР № 1195387, кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
