Изобретение относится к электротехнике, а именно к электрическим машинам, и может быть использовано в линейном шаговом электроприводе систем автоматики.
Цель изобретения - снижение трудоемкости изготовления и повьппение точности позиционирования.
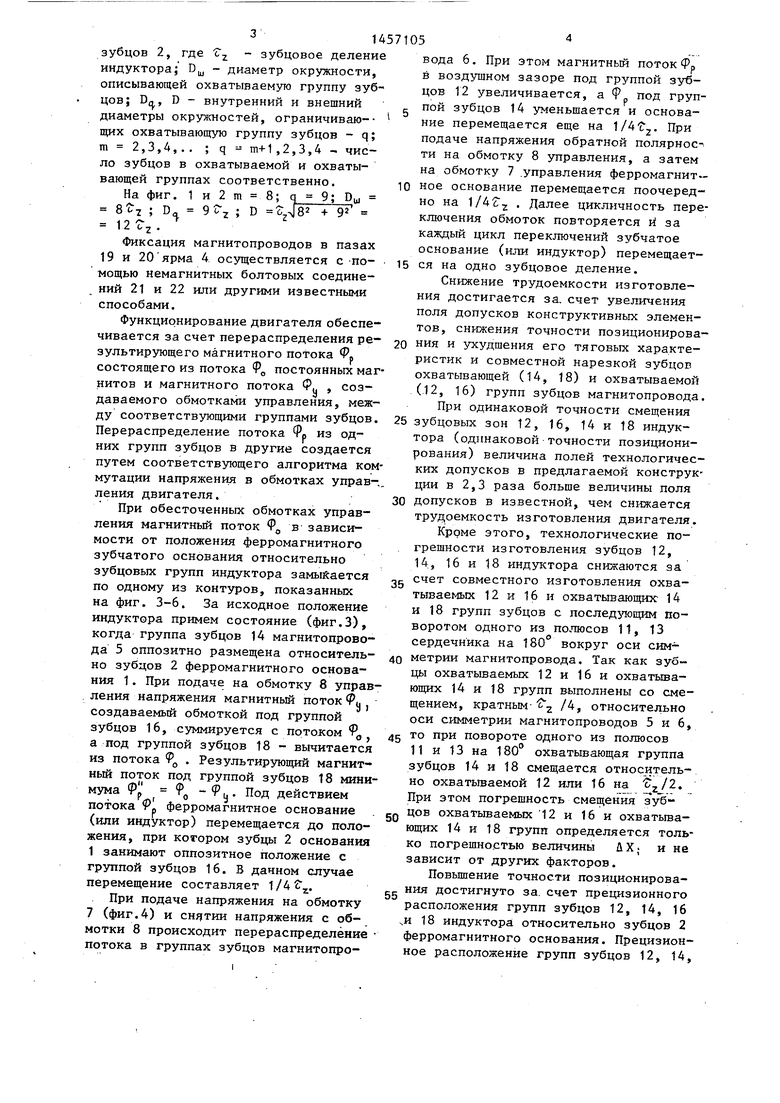
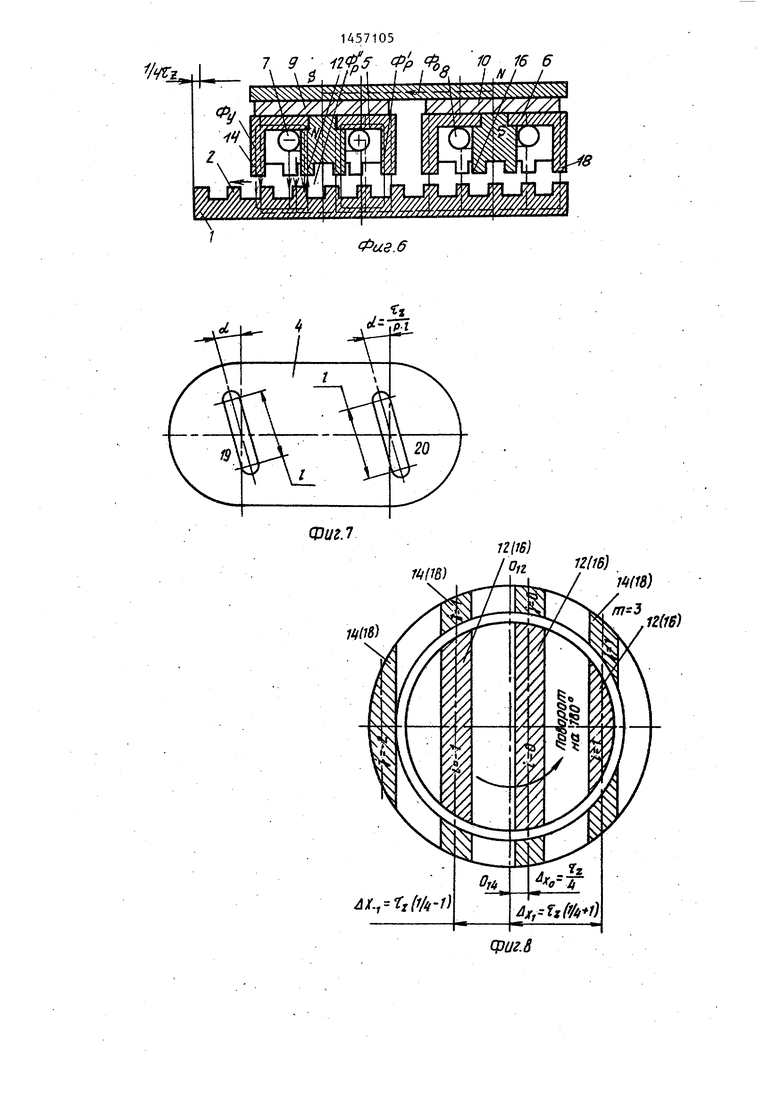
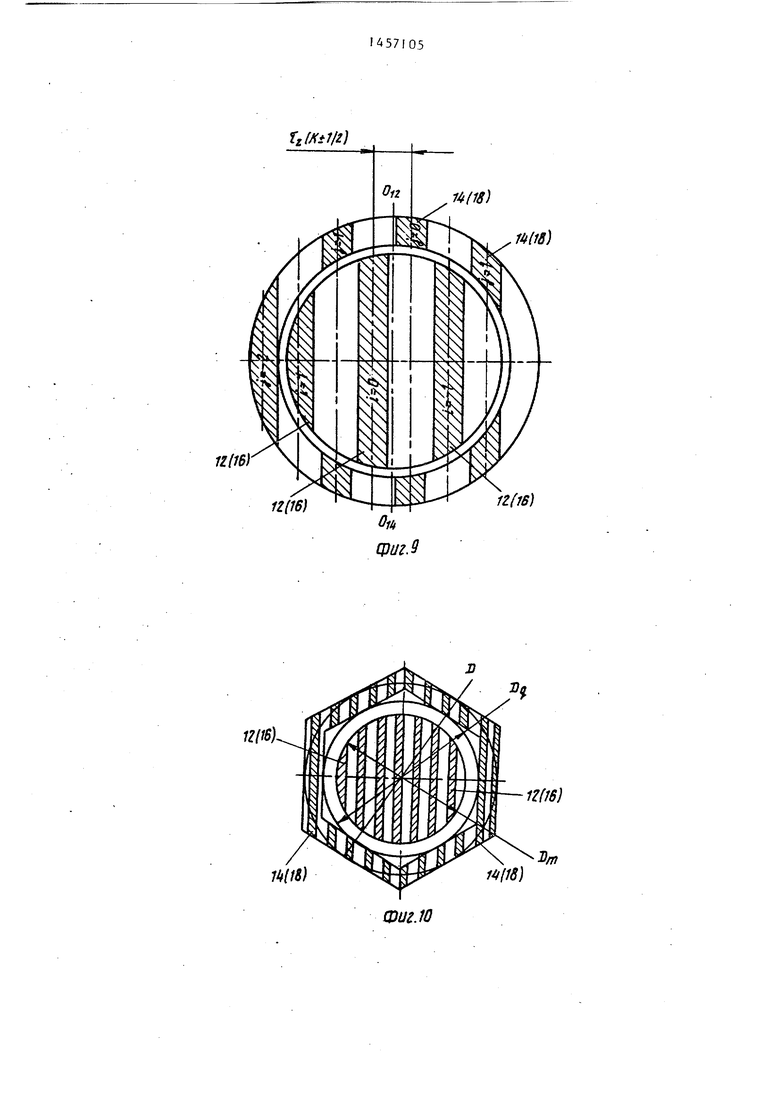
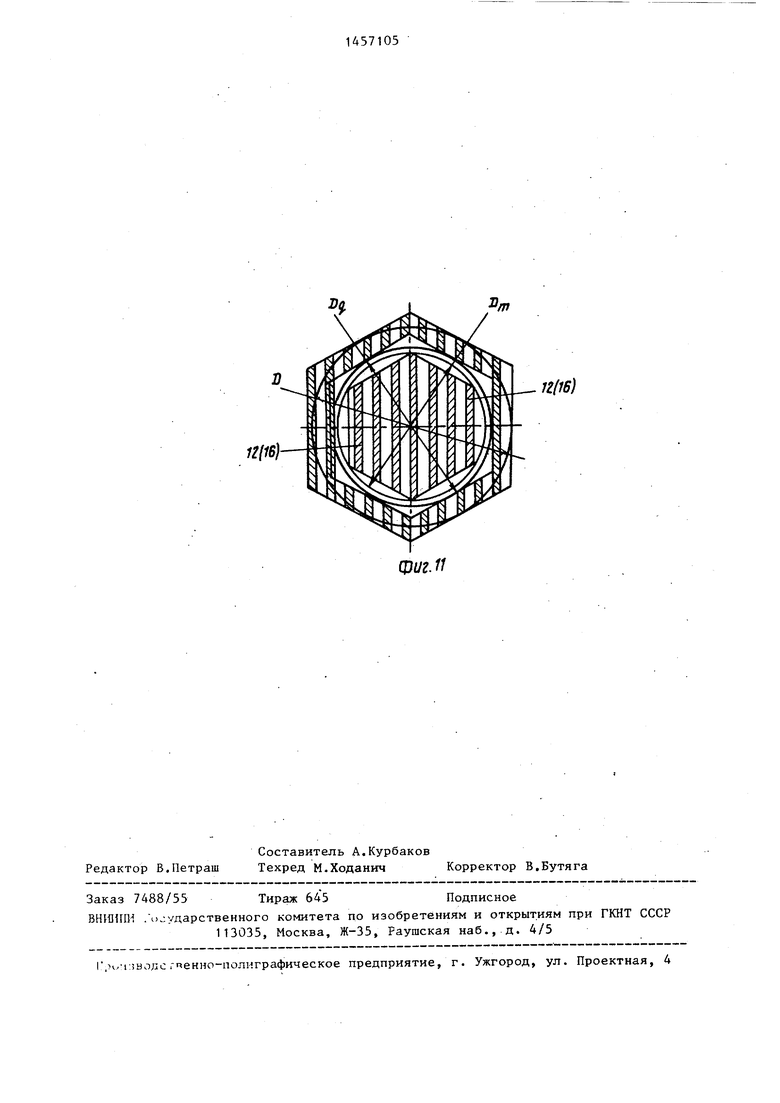
На фиг. 1 показан электродвигатель, общий вид, разрез вдоль движения; на фиг. 2 - разрез А-Анафиг.1; на фиг. 3-6 - схемы физического сос- тояния, поясняющие принцип работы двигателя; на фиг. 7 - ярмо с направляющими пазами; на фиг. 8 - взаимное положение охватывающей и охватываемой группы зубцов после совместной разрезки зубцов; на фиг.9- взаимное положение зубцов охватываемой и охватывающей групп после поворота зубцов охватываемой группы на 180 ; на фиг. 10 и 11 - варианты выполнения охватываемой и охватыва- ющей зубцовых групп в виде многогранных фигур.
Линейный шаговый электродвигатель содержит ферромагнитное основание 1 с зубцами 2 и индуктор 3. Зубцы 3 выполнены с шагом Z в направлении, нормальном к направлению движения. Индуктор 3 состоит из ярма 4, магни- топроводов 5 и 6 с обмотками 7 и 8 управления и постоянных магнитов 9 и 10. Постоянные магниты 9 и 10 расположены между ярмом 4 и спинками магнитопроводов 5 и 6. Магнитопро- вод 5 выполнен в виде двухполюсного сердечника, на полюсе 11 которого выполнена группа зубцов 12, а на полюсе 13 - группа зубцов 14. Магни- топровод 6 выполнен так же, как маг- нитопровод 5, и состоит из сердечни- ка, на полюсе 15 которого выполнена группа зубцов 16, а на полюсе 17 - группа зубцов 18. Зубцы, образующие из групп, выполнены с шагом с:Группа зубцов 12 полюса 11 смещена относительно группы зубцов 14 .полюса
13 на величину Х ( ± -2
логично смещена группа зубцов 16 относительно группы зубцов 18. Осевая линия OjO, магнитопровода 5 смещена относительно осевой линии ,о магнитопровода 6 на величину Х. С (п t1/p). Для случая, приведенного на
фиг. 1 и 2, К 0; Х
12; р 4; Х. С,(12 + 1/4).
Группа зубцов 14, вьтолненная на: полюсе 13, охватывает группу зубцов 12, выполненную на полюсе 14. Аналогично группа зубцов .18, выполненная на полюсе 17, охватывает группу зубцов 16, вьтолненную на полюсе 15. Осевая линия ОуО магнитопровода 5 совпадает с осевой линией поверхностей полюсов 12-й и 14-й групп зубцов Соответственно, осевая линия магнитопровода 6 совпадает с осевой линией расположенных на нем зубцовых поверхностей. Осевые линии , 12-й и 14-й зубцовых групп смещены относительно осевой линии ОуО маг- ндгтопровода 5 на величину, кратную -у- . Аналогично осевые линии 16-й и 18-й зубцовых групп смещены относительно осевой линии ОйО,о магнитопровода 6.
В общем случае (фиг.8 и 9) зубцы расположены несимметрично относительно осевой линии магнитопровода. При этом зубцы, расположенные по одну сторону осевой линии, смещены относительно нее на величину iXj
о (-J- + i), а зубцы, выполненные
по другую сторону осевой линии магнитопровода, смещены относительно
нее на величину ДХ:
... 1ч
. -z(j - -4-.
где i О, +1, +2, +3, ... - номера зубцов, расположенных по одну сторону осевой линии магнитопровода (OfiOio); J 1,2,3,... - номера зубцов, расположенных по другую сторону осевой линии магнитопровода OjOg (0,0,д ). При этом i-ми номерами обозначены ближние к осевой линии магнитопровода зубцы.
Геометрические размеры магнитопроводов 5 и 6 удовлетворяют соотношениям
Ош °г 1
D 2 - т2 + qi ,
при этом магнитопроводы 5 и 6 установлены в соответствующих направляющих пазах 19 и 20, вьшолненных в ярме 4. Пазы 19 и 20 выполнены под
oL
Г,-р -i-c- к
1
осевым линиям
1457105
зубцов 2, где Г - зубцовое деление индуктора; П,, - диаметр окружности, описывающей охватываемую группу зубцов; , Т) - внутренний и внешний диаметры окружностей, ограничиваю-- щих охватывающую группу зубцов - q; m 2,3,4,., ; q - m+1,2,3,4 - число зубцов в охватываемой и охватывающей группах соответственно.
На фиг. 1 и 2 m 8; q 9; Рщ
; D, gtr.,
g п
10
D
+ 9
12 -гГг .
Фиксация магнитопроводов в пазах 19 и 20 ярма 4 осуществляется с-по- мощью немагнитных болтовых соедине- НИИ 21 и 22 или другими известными способами.
Функционирование двигателя обеспечивается за счет перераспределения результирующего магнитного потока Ф, состоящего из потока Ф постоянных магнитов и магнитного потока Ф , создаваемого обмотками управления, между соответствующими группами зубцов. Перераспределение потока Ф из одних групп зубцов в другие создается путем соответствующего алгоритма коммутации напряжения в обмотках управ-., ления двигателя.
При обесточенных обмотках управления магнитный поток Ф,, в зависимости от положения ферромагнитного зубчатого основания относительно зубцовых групп индуктора замывается по одному из контуров, показанных на фиг. 3-6. За исходное положение индуктора примем состояние (фиг.З), когда группа зубцов 14 магнитопрово- да 5 оппозитно размещена относительно зубцов 2 ферромагнитного основания 1. При подаче на обмотку 8 управения напряжения магнитный поток Рц оздаваемый обмоткой под группой
убцов 16, суммируется с потоком 9
о 45
под группой зубцов 18 - вычитается з потока Рд . Результирующий магнитый поток под группой зубцов 18 миниума (Р 9 -9. Под действием отока 9р ферромагнитное основание или индуктор) перемещается до полоения, при котором зубцы 2 основания занимают оппозитное положение с руппой зубцов 16. В данном случае еремещение составляет 1/4t.
При подаче напряжения на обмотку (фиг.4) и снятии напряжения с оботки 8 происходит перераспределение отока в группах зубцов магнитопроко 15 с
ни по то 20 НИ ри ох
25 зу то ро ки ци 30 до тр гр 14 3g сч ты и во се 40 ме цы ющ ще оси то 11 зуб но При 50 цов ющи ко зав
gg ния рас хИ 1 фер ное
е
вода 6. При этом магнитный поток Фр в воздушном зазоре под группой зубцов 12 увеличивается, а Ф под груп- g пой зубцов 14 уменьшается и основание перемещается еще на 1/4 с.,. При
10
.,
45
подаче напряжения обратной полярное- ти на обмотку 8 управления, а затем на обмотку 7 .управления ферромагнитное основание перемещается поочередно на . Далее цикличность переключения обмоток повторяется и за каждый цикл переключений зубчатое основание (или индуктор) перемещает- 15 ся на одно зубцовое деление.
Снижение трудоемкости изготовления достигается за. счет увеличения поля допусков конструктивных элементов, снижения точности позиционирова- 20 НИН и ухудшения его тяговых характеристик и совместной нарезкой зубцов охватывающей (14, 18) и охватываемой (12, 16) групп зубцов магнитопровода.
При одинаковой точности смещения 25 зубцовых зон 12, 16, 14 и 18 индуктора (одинаковой точности позиционирования) величина полей технологических допусков в предлагаемой конструкции в 2,3 раза больше величины поля 30 допусков в известной, чем снижается трудоемкость изготовления двигателя. Кроме этого, технологические погрешности изготовления зубцов 12, 14, 16 и 18 индуктора снижаются за 3g счет совместного изготовления охватываемых 12 и 16 и охватывающих- 14 и 18 групп зубцов с последзтощим поворотом одного из полюсов 11, 13 сердечника на 180° вокруг оси сим- 40 метрик магнитопровода. Так как зубцы охватываемых 12 и 16 и охватывающих 14 и 18 групп выполнены со смещением, кратным- б г /4, относительно оси симметрии магнитопроводов 5 и 6, то при повороте одного из полюсов 11 и 13 на 180 охватьшающая группа зубцов 14 и 18 смещается относительно охватьгоаемой 12 или 16 на /2. При этом погрешность смещения уб- 50 цов охватываемых 12 и 16 и охватьгеа- ющих 14 и 18 групп определяется только погрещностью величины UX; и не зависит от других факторов.
Повьшгение точности позиционирова- gg ния достигнуто за. счет прецизионного расположения групп зубцов 12, 14, 16 хИ 18 индуктора1 относительно зубцов 2 ферромагнитного основания. Прецизионное расположение групп зубцов 12, 14,
16 и 18 индуктора обеспечивается путем коррекции взаимного положения групп зубцов 12, 14, 16 и 18 магнит- провода и коррекции положения магни- топроводов 5 и 6 относительно зубцов 2 основания. Коррекция взаимного положения зубцов охватываемых 12 и 16 и охватьшающих 14 и 18 групп обеспечивается поворотом одной из групп относительно их общей оси симметрии, а коррекция положения сердечников относительно зубцов ферромагнитного основания выполняется путем смещения магнитопровода в направляющем пазу ярма.
Так как направляющий паз (фиг.7) выполнен под углом к зубцам ферромагнитного основания 1, то при перемещении магнитопроводов 5 и 6 в пазу группы зубцов 12, 14, 16 и 18 магнитопроводов 5 и 6 смещаются относительно зубцов 2 основания. Величина смещения определяется величиной угла
основание, зубцы которого выполнены с шагом Tj и перпендикулярны продольной оси двигателя, и индуктор, состоящий из ярма, магнитопроводов с обмотками управления и постоянных магнитов, расположенных между ярмом и магнитопроводами, магнитопроводы выполнены в виде двухполюсных сердечников с группой зубцов на каждом
10
15
полюсе, зубцы каждой группы выполнены с шагом о , группы зубцов каждого из сердечников сдвинуты одна относительно другой на величину
( ± -о ° магнитопроводов сдвинуты одна относительно другой на величину ((п ±), где К, п 20
целые числа; р - число полюсов индуктора, отличающийся тем, что, с целью снижения трудоемкости изготовления и повьш1ения точности
.. , ...позиционирования, группа зубцов оди длиной паза и в общем случае может 25 ного полюса каждого из сердечников быть равна величине Nj C ПрактИчес- охватывает группу зубцов другого по- ки коррекция может быть выполнена при смещении магнитопроводов 5 и 6 в .пределах 1/р части зубцового деления.
Перемещением магнитопров.одов 5 и
люса этого сер дечника, осевые линии групп зубцов смещены относительно осевой линии магнитопровода на вели30
.
чину, кратную -у-, геометрические
основание, зубцы которого выполнены с шагом Tj и перпендикулярны продольной оси двигателя, и индуктор, состоящий из ярма, магнитопроводов с обмотками управления и постоянных магнитов, расположенных между ярмом и магнитопроводами, магнитопроводы выполнены в виде двухполюсных сердечников с группой зубцов на каждом
полюсе, зубцы каждой группы выполнены с шагом о , группы зубцов каждого из сердечников сдвинуты одна относительно другой на величину
( ± -о ° магнитопроводов сдвинуты одна относительно другой на величину ((п ±), где К, п ного полюса каждого из сердечников охватывает группу зубцов другого по-
люса этого сер дечника, осевые линии групп зубцов смещены относительно осевой линии магнитопровода на вели
.
чину, кратную -у-, геометрические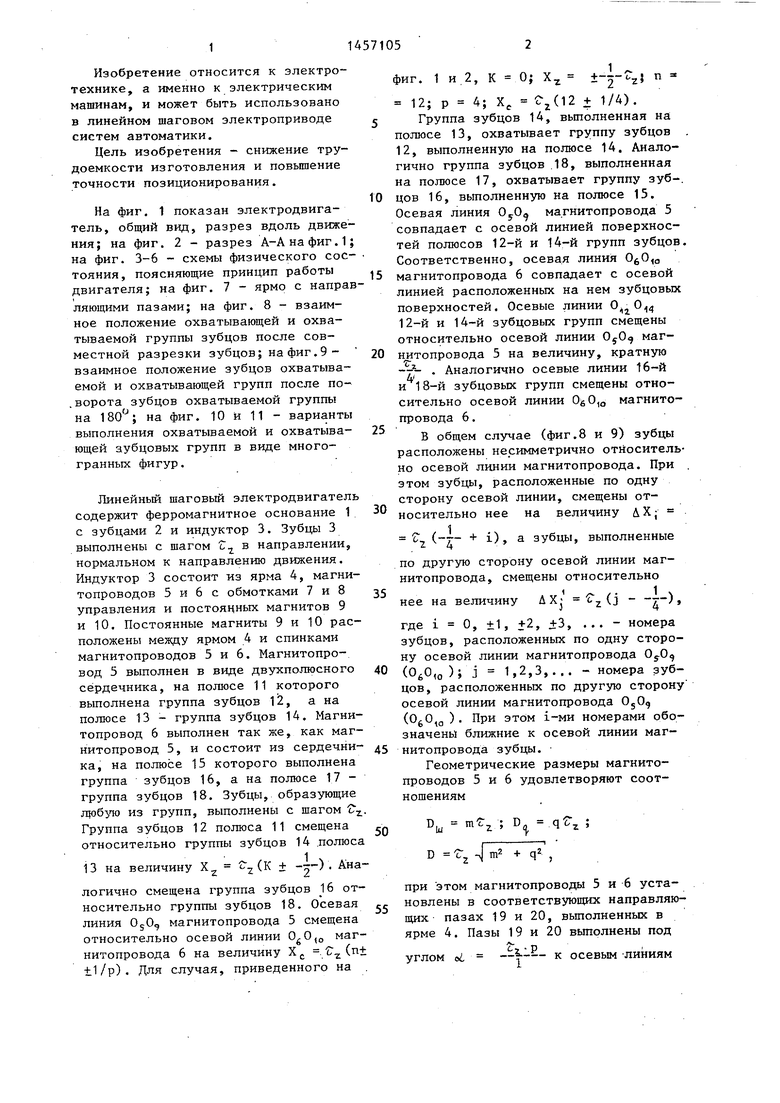
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный шаговый электродвигатель | 1988 |
|
SU1527690A1 |
| Линейный шаговый электродвигатель | 1989 |
|
SU1700706A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| ОДНОФАЗНЫЙ БЕСКОНТАКТНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2009 |
|
RU2393615C1 |
| Магнитоэлектрический генератор | 2018 |
|
RU2697812C2 |
| ТОРЦЕВАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2007 |
|
RU2337458C1 |
| Магнитопровод электрической машины | 1981 |
|
SU1137554A1 |
Изобретение относится к электротехнике и может быть использовано в дискретных электроприводах с линейным перемещением исполнительного органа. Цель состоит в снижении трудоемкости изготовления и повышении тЬчности позиционирования. Двигатель содержит основание 1 с зубцами 2, выполненными с шагом б , и индуктор, содержащий ярмо 4, магнитопроводы 5, 6 с обмотками управления 7, 8 и постоянные магниты 9, 10. Постоянные магниты 9, 10 расположены между ярмом 4 и 4 спинками магнитопроводов 5, 6. Маг- нитопровод 5 выполнен в виде двухполюсного сердечника, на полюсе 11 которого имеется группа зубцов 12, а на полюсе 13 - группа зубцов 14. Зубцы, образующие любую из групп, выполнены с шагом t . Группа зубцов 12 полюса 11 смещена относительно группы зубцов 14 полюса 13 на величину Т. (К + 1/2). Осевая линия ОуО, магнитопровода 5 смещена относительно осевой линии , магнитопровода 6 на величину с (п + 1/р), где К - целое число; р - число пар полюсов индуктора. Группа зубцов 14, выполненная на полюсе 13, охватывает группу зубцов 12, выполненную на полюсе 11, что позволяет увеличить поле допусков всех конструктивных элементов и совместную нарезку зубцов 1.2 и 14. Возможность коррекции положения магнитопроводов 5 и 6 относительно зубцов 2 основания повьш1ает точность позиционирования. 11 ил. Си S (Л ел S 6 Фиг.1
6 в пазу ярма корректируется величина с (п ± 1/р), определяющая смещение охватываемых 12 и 16 и охватывающих 14 и 18 групп зубцов магнито- проводов 5 и 6 относительно зубцов 2 ферромагнитного основания, а вращением охватываемых групп зубцов вокруг оси симметрии, магнитопроводов 5 и 6 корректируется величина
(К ± -о) определяющая смещение
охватываемых 12 и 16 групп относительно охватывающих 14 и 18. Коррекция указанных величин компенсирует влияние технологических погрешностей изготовления двигателя на точность взаимного расположения групп зубцов индуктора , что повьш1ает точность позиционирования двигателя ,
Формула изобретения
Линейный шаговый электродвигатель содержащий ферромагнитное зубчатое
размеры магнитопровода удовлетворяют соотношениям
Эт D
qZ.
D c:
:т
|2 +
этом магнитопроводы установлены правляющих пазах ярма, выполнен 2.
од углом;- к осевым линиям
ов ферромагнитного основания, D - диаметр окружности, описывающей охватываемую группу зубцов га;
-внутренний и внешний диаметры окружностей, ограничивающих охватьшающую группу зубцов q;
-длина паза ярма;
2,3,4,... - число зубцов в охватываемой группе;
га+1,2,3,4,... - целое число.
D
1 m
/2.
7 П
ХА™4.11.Ж.5 -VV
/у
S
г.
Фиа.у
7 9 -.Ф Р
Ю 16 6
U...L
8
Физ.6
izds)
ли.,-Гг (
(риг. 8
(iJ/2l
11116}
12(16)
)
Фиг.ю
litds
1Z(1B)
.f
12(16
J/77
фиг. 11
| Патент ФРГ.№ 3338864, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
