ДГ / Гг/И)
сл to
О5 СО
логичной втулкой сопряжены полюсы 10 и 9, Внутреннее цилиндрическое отверстие втулки 21 выполнено эксцентричным относительно наружной новерх- jiocTH втулки с эксцентриситетом . удовлетворяющим условию - $Г -К, где К 1,2,3. Втулки 21 установлена с возможностью ее поворота относительно полюсов. Настройка рабочего положения зубцовых зон охватывающего и охваченного полюсов производится в процессе сборки, что исключает привязку к базовой координате полюсов. При настройке полюсов исключается нарушение параллельности ориентации зубцов . 5 ил.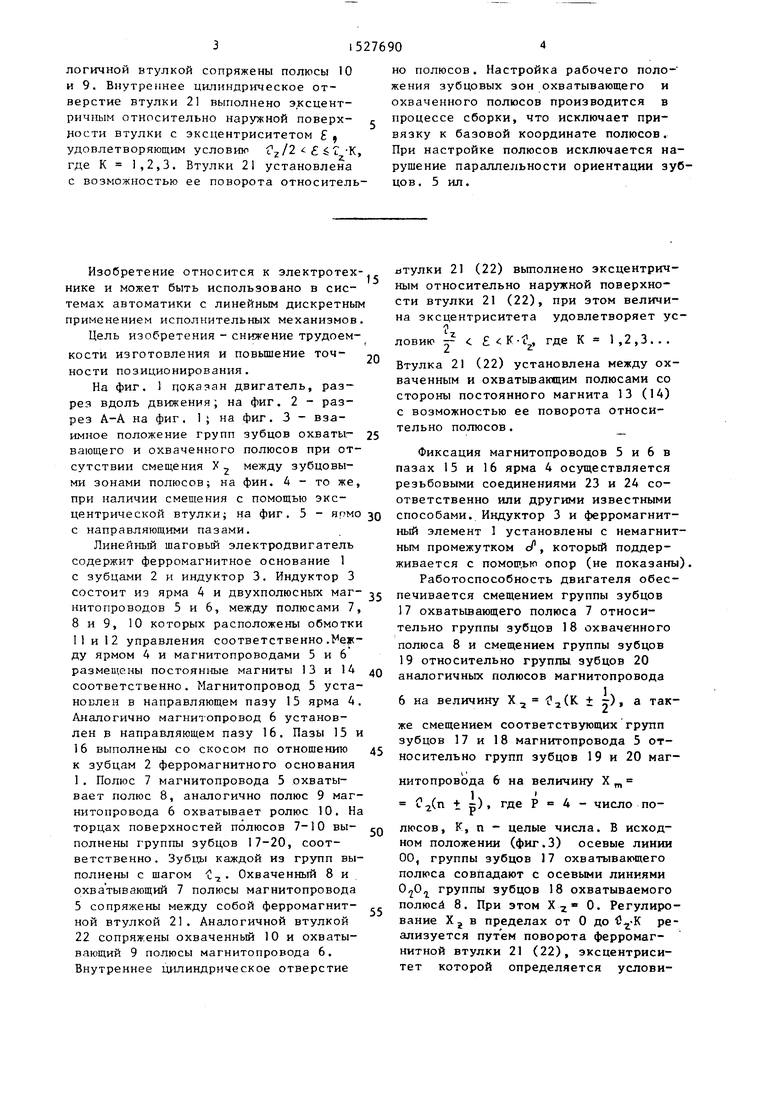
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный шаговый электродвигатель | 1987 |
|
SU1457105A1 |
| Линейный шаговый электродвигатель | 1989 |
|
SU1700706A1 |
| Управляемая гистерезисная муфта | 1981 |
|
SU983929A1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Линейный многофазный двигатель | 1978 |
|
SU1166232A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2079949C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| СИНХРОННЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ С ПОСТОЯННЫМИ МАГНИТАМИ | 1995 |
|
RU2141156C1 |
| Индуктор | 1990 |
|
SU1711243A1 |
Изобретение относится к электротехнике и может быть применено в системах автоматики и с линейным дискретным перемещением исполнительных механизмов. Целью является снижение трудоемкости изготовления и повышение точности позиционирования. Устройство содержит ферромагнитное основание с зубцами 2 и индуктор 3. Индуктор 3 состоит из ярма 4 и двухполюсных магнитопроводов 5, 6, между полюсами 7, 8 и 9, 10 которых расположены обмотки 11, 12 управления соответственно. Между ярмом 4 и магнитопроводами 5, 6 размещены постоянные магниты 13, 14 соответственно. Магнитопроводы 6, 5 установлены в направляющих пазах ярма 4, которые выполнены со скосом по отношению к зубцам 2 ферромагнитного элемента 1. Полюс 7 магнитопровода 5 охватывает полюс 8, а полюс 9 магнитопровода 6 - полюс 10. На торцовых поверхностях полюсов 7, 8, 10 выполнены группы зубцов 17, 18, 19, 20 соответственно. Охваченный 8 и охватывающий 7 полюсы магнитопровода 5 сопряжены между собой ферромагнитной втулкой 21, аналогичной втулкой сопряжены полюсы 10 и 9. Внутреннее цилиндрическое отверстие втулки 21 выполнено эксцентричным относительно наружной поверхности втулки с эксцентриситетом ε удовлетворяющим условию τZ/2*36E≤τZ.K, где K = 1, 2, 3. Втулка 21 установлена с возможностью ее поворота относительно полюсов. Настройка рабочего положения зубцовых зон охватывающего и охваченного полюсов производится в процессе сборки, что исключает привязку к базовой координате полюсов. При настройке полюсов исключается нарушение параллельности ориентации зубцов. 5 ил.
Изобретение относится к электротех
нике и может быть использовано в системах автоматики с линейным дискретным применением исполнительных механизмов.
Цель изобретения - снижение трудоемкости изготовления и повьшение точ- ности позиционирования.
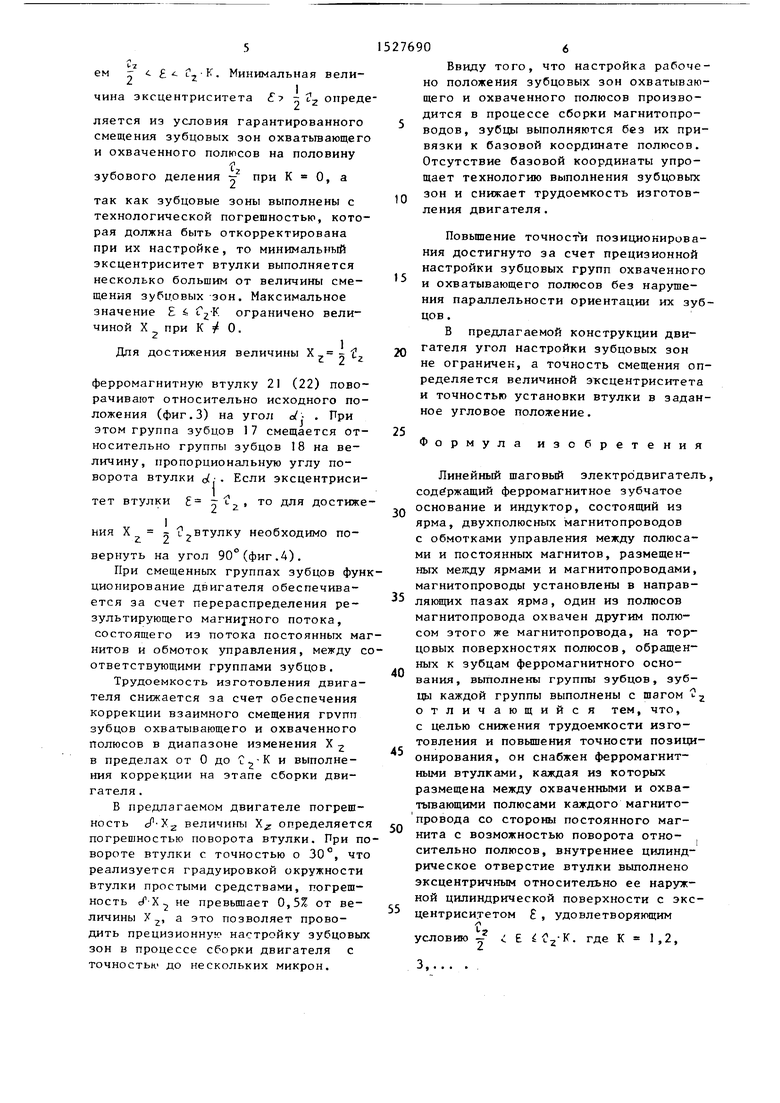
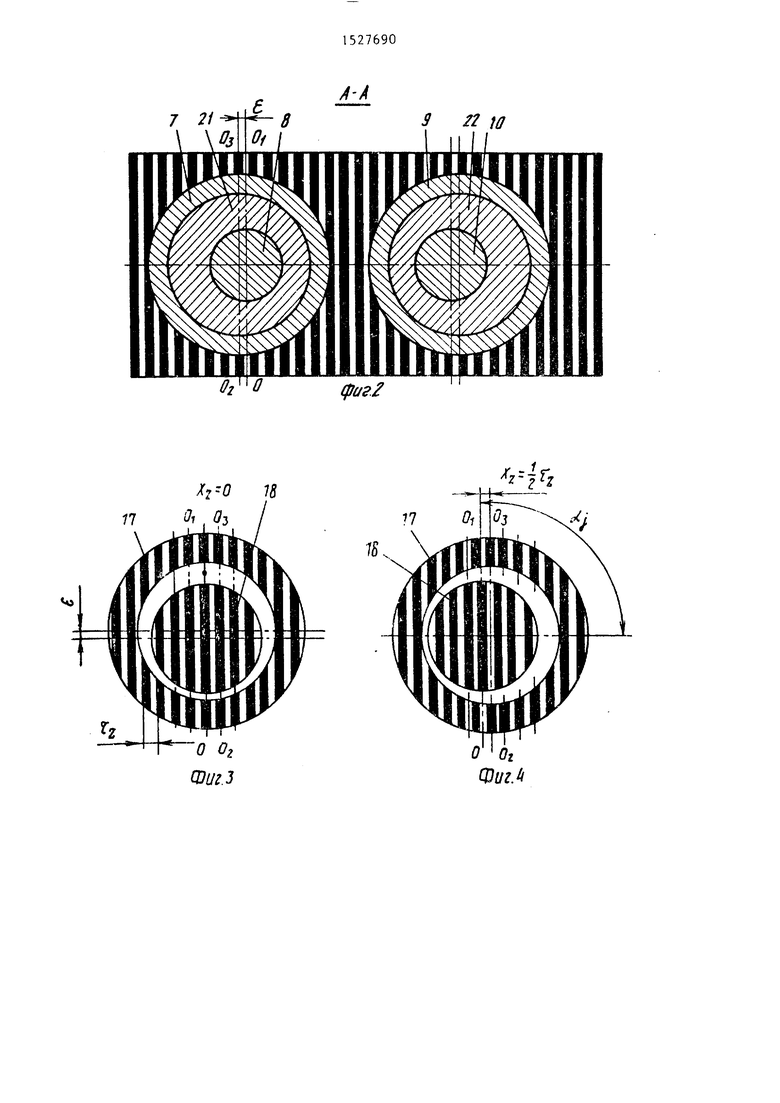
На фиг. 1 показан двигатель, разрез вдоль движения; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - взаимное положение групп зубцов охваты- Бающего и охваченного полюсов при отсутствии смещения Х между зубцовы- ми зонами ПОЛЮСОВ; на фин. 4 - то же, при наличии смещения с помощью эксцентрической втулки; на фиг, 5 - япмо с направляющими пазами.
Линейный шаговый электродвигатель содержит ферромагнитное основание 1 с зубцами 2 и индуктор 3. Индуктор 3 состоит из ярма 4 и двухполюсных маг- нитопроводов 5 и 6, между полюсами 7, 8 и 9, 10 которых расположены обмотки II и 12 управления соответственно .(- ду ярмом 4 и магнитопроводами 5 и 6 размещены постоянные магниты 13 и 14 соответственно. Магнитопровод 5 установлен в направляющем пазу 15 ярма 4. Аналогично магнитопровод 6 установлен в направляющем пазу 16. Пазы 15 и 16 выполнены со скосом по отношению к зубцам 2 ферромагнитного основания 1. Полюс 7 магнитопровода 5 охватывает полюс 8, аналогично полюс 9 магнитопровода 6 охватывает ролюс 10. На торцах поверхностей полюсов 7-10 вы- полнены группы зубцов 17-20, соответственно . Зубцы каждой из групп выполнены с щагом -C-j. Охваченный 8 и охватывающий 7 полюсы магнитопровода 5 сопряжены между собой ферромагнит- ной втулкой 21. Аналогичной втулкой 22 сопряжены охваченный 10 и охватывающий 9 полюсы магнитопровода 6. Внутреннее цилиндрическое отверстие
5
п
5 Q
5 д З Q ,
ьтулки 21 (22) вьтолнено эксцентричным относительно наружной поверхности втулки 21 (22), при этом величина эксцентриситета удовлетворяет ус
ловию Y 1 ,2,3... Втулка 21 (22) установлена между охваченным и охватьшающим полюсами со стороны постоянного магнита 13 (14) с возможностью ее поворота относительно полюсов.
Фиксация магнитопроводов 5 и 6 в пазах 15 и 16 ярма 4 осуществляется резьбовыми соединениями 23 и 24 соответственно или другими известными способами. Индуктор 3 и ферромагнитный элемент 1 установлены с немагнитным промежутком cf, который поддерживается с помощью опор (не показаны).
Работоспособность двигателя обеспечивается смещением группы зубцов 17 охватьшающего полюса 7 относительно группы зубцов 18 охваченного полюса 8 и смещением группы зубцов 19 относительно группы зубцов 20 аналогичных полюсов магнитопровода
6 на величину Х f.j(K ± -) , а также смещением соответствующих групп зубцов 17 и 18 магнитопровода 5 относительно групп зубцов 19 и 20 магнитопровода 6 на величину X „
I
1(п t р). где Р 4 - число полюсов, К, п - целые числа. В исходном положении (фиг.З) осевые линии 00, группы зубцов 17 охватывающего полюса совпадают с осевыми линиями группы зубцов 18 охватываемого полюсй 8. При этом Х 0. Регулирование Xj в пределах от О до реализуется путем поворота ферромагнитной втулки 21 (22), эксцентриситет которой определяется условием -: :. Lj-K. Минимальная величина эксцентриситета f - I определяется из условия гарантированного смещения зубцовых зон охватьшающего
и охваченного полюсов на половину
-f зубового деления - при К О, а
так как зубцовые зоны выполнены с технологической погрешностью, которая должна быть откорректирована при их настройке, то минимальный эксцентриситет втулки выполняется несколько большим от величины смещения зубцовых ЗОН. Максимальное значение б ограничено величиной X при К 7 0.
Для достижения величины (2
ферромагнитную втулку 21 (22) поворачивают относительно исходного положения (фиг.З) на угол d . При этом группа зубцов 17 смещается относительно группы зубцов 18 на величину, пропорциональную углу поворота втулки d: Если эксцентриситет втулки 2 t то для достижения X я 1 2втулку необходимо повернуть на угол 90°(фиг.4).
При смещенных группах зубцов функционирование двигателя обеспечивается за счет перераспределения результирующего магнитного потока, состоящего из потока постоянных магнитов и обмоток управления, между соответствующими группами зубцов.
Трудоемкость изготовления двигателя снижается за счет обеспечения коррекции взаимного смещения групп зубцов охватывающего и охваченного полюсов в диапазоне изменения X - в пределах от О до и выполнения коррекции на этапе сборки двигателя .
В предлагаемом двигателе погрешность J -Xg величины Х определяется погрешностью поворота втулки. При повороте втулки с точностью о 30°, что реализуется градуировкой окружности втулки простыми средствами, погрешность сГ X не превышает 0,5% от величины X2, а это позволяет проводить прецизионную настройку зубцовых зон в процессе сборки двигателя с точностьк до нескольких микрон.
15276906
Ввиду того, что настройка рабоче- но положения зубцовых зон охватывающего и охваченного полюсов производится в процессе сборки магнитопро- водов, зубцы выполняются без их привязки к базовой коорд1шате полюсов. Отсутствие базовой координаты упрощает технологию выполнения зубцовых зон и снижает трудоемкость изготов10
ления двигателя,
Повьшение точност и позиционирования достигнуто за счет прецизионной настройки зубцовых групп охваченного и охватывающего полюсов без нарушения параллельности ориентации их зубцов .
В предлагаемой конструкции дви- Q гателя угол настройки зубцовых зон не ограничен, а точность смещения определяется величиной эксцентриситета и точностью установки втулки в заданное угловое положение.
5
Формула изобретения
Линейный шаговый электродвигатель, содержащий ферромагнитное зубчатое
0
основание и индуктор, состоящий из
0
ярма, двухполюсных магнитопроводов с обмотками управления между полюсами и постоянных магнитов, размещенных между ярмами и магнитопроводами, магнитопроводы установлены в направ- 5 ляющих пазах ярма, один из полюсов магнитопровода охвачен другим полюсом этого же магнитопровода, на торцовых поверхностях полюсов, обращенных к зубцам ферромагнитного основания, выполнены группы зубцов, зубцы каждой группы выполнены с шагом i- отличающийся тем, что, с целью снижения трудоемкости изготовления и повышения точности позици- онирования, он снабжен ферромагнитными втулками, каждая из которых размещена между охваченньгми и охва- тьгеающими полюсами каждого магнито- провода со стороны постоянного магнита с возможностью поворота относительно полюсов, внутреннее цилиндрическое отверстие втулки вьтолнено эксцентричным относительно ее наружной цилиндрической поверхности с экс5 центриситетом , удовлетворяющим
условию i. . где К 1,2,
0
7 21 Oz О
фиг
Х2 -0 18
п
3 П W
17
t ail
0s
Фи.5
| Линейный шаговый электродвигатель | 1986 |
|
SU1376184A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейный шаговый электродвигатель | 1987 |
|
SU1457105A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
